一种智能避障小车安全测速装置
本技术属于智能机器人速度测量设备领域,尤其涉及一种智能避障小车安全测速装置。
背景技术:
1、智能机器人对自身速度测量时主要利用在设备轮轴上加载线速度计或角速度计并通过进一步计算获取,但当设备有曲率转弯时测速结果不佳,因此在智能机器人加装了避障系统之后原技术方案无法有效测速,因此提出了利用雷达进行测速的问题,但常规的连续波雷达测速在对零速或低速时检测存在很大问题,难以有效测速,其主要产生原因在于发射信号泄漏及其他信号泄漏造成的无法将发射信号与回波信号在频域上区分开来。
技术实现思路
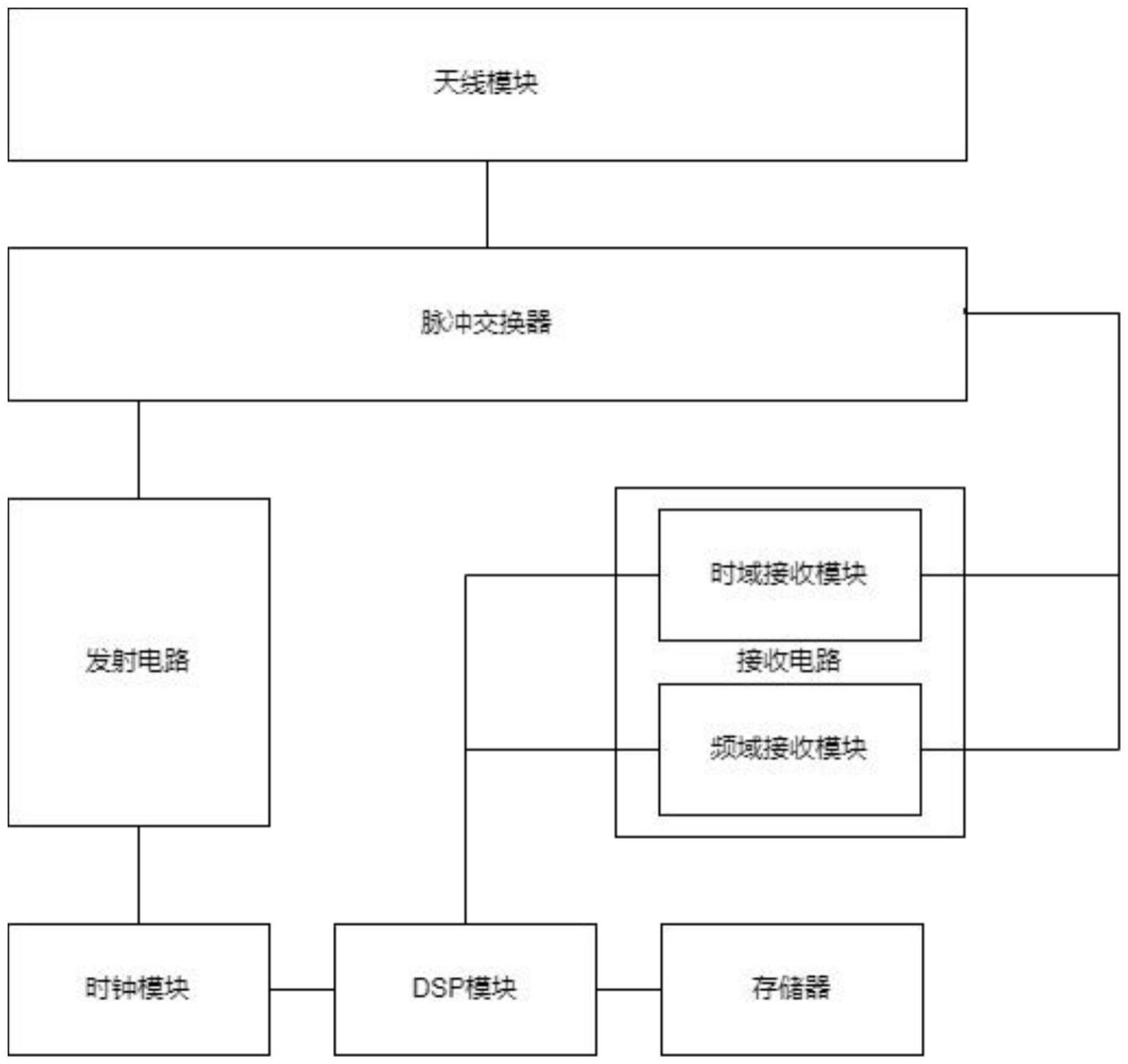
1、针对现有技术存在的问题,本实用新型提供了一种智能避障小车安全测速装置,包括:天线模块、脉冲交换器、发射电路、接收电路和dsp模块;脉冲交换器分别与天线模块、发射电路、接收电路连接;接收电路包括时域接收模块和频域接收模块;时域接收模块和频域接收模块分别与dsp模块连接。
2、进一步地,智能避障小车安全测速装置还包括存储器,与所述dsp模块连接。
3、进一步地,智能避障小车安全测速装置还包括时钟模块,分别与所述发射电路与dsp模块连接。
4、进一步地,时钟模块为一个晶振信号发射器。
5、结合上述的技术方案和解决的技术问题,请从以下几方面分析本实用新型所要保护的技术方案所具备的优点及积极效果为:
6、本实用新型依托现有硬件水平,通过提高系统的收发隔离度,采用宽带接收和发射频率预偏移,使得泄漏信号小于雷达接收的最小回波信号,从而有效实现零速及低速状态下智能避障小车的精确速度检测。本实用新型很好地实现了对低速及零速状态的可靠检测,满足系统检测概率和虚警率要求。
技术特征:
1.一种智能避障小车安全测速装置,其特征在于,所述智能避障小车安全测速装置包括:天线模块、脉冲交换器、发射电路、接收电路和dsp模块;
2.如权利要求1所述的智能避障小车安全测速装置,其特征在于,所述智能避障小车安全测速装置还包括存储器,与所述dsp模块连接。
3.如权利要求1所述的智能避障小车安全测速装置,其特征在于,所述智能避障小车安全测速装置还包括时钟模块,分别与所述发射电路与dsp模块连接。
4.如权利要求3所述的智能避障小车安全测速装置,其特征在于,所述时钟模块为一个晶振信号发射器。
技术总结
本技术属于智能机器人速度测量设备领域,公开了一种智能避障小车安全测速装置,包括:天线模块、脉冲交换器、发射电路、接收电路和DSP模块;脉冲交换器分别与天线模块、发射电路、接收电路连接;接收电路包括时域接收模块和频域接收模块;时域接收模块和频域接收模块分别与DSP模块连接。本技术依托现有硬件水平,通过提高系统的收发隔离度,采用宽带接收和发射频率预偏移,使得泄漏信号小于雷达接收的最小回波信号,从而有效实现对零速及低速状态下智能避障小车的测速,且本技术很好地实现了对低速及零速状态的可靠检测,满足系统检测概率和虚警率要求。
技术研发人员:李宁,张光南,陈冬,何苗,樊攀,何鹏
受保护的技术使用者:宝鸡文理学院
技术研发日:20221124
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!