一种混凝土泵车臂架监测设备的制作方法
本技术涉及泵车臂架监测,具体地,涉及一种混凝土泵车臂架监测设备。
背景技术:
1、混凝土泵车是利用压力将混凝土沿管道连续输送的机械。由泵体和机械臂组成,混凝土泵体装在汽车底盘上,装备可伸缩或曲折的机械臂,其机械臂上再安装输送管,由此组成泵车,混凝土泵车能够通过机械臂的伸缩特性将混凝土进行泵送操作。
2、然而,现有的混凝土泵车臂架通常是由多段机械臂通过轴连接组成的,利用液压驱动机构实现多段机械臂的伸缩和曲折,因此,需要对每两个机械臂轴连接处的转动角度和振幅进行感应监测,在对机械臂的轴连接处进行状态监测时,虽然能够起到监视预警作用,但机械臂实际使用时,转动幅度过大并超过监测预警的转动幅度时,无法及时进行安全急停,导致混凝土泵车臂架的安全性依旧不足。
技术实现思路
1、本实用新型旨在至少解决现有技术中存在的技术问题之一。
2、为此,本实用新型的一个目的在于提出一种混凝土泵车臂架监测设备,该混凝土泵车臂架监测设备可以在对倾斜角度和振动进行监测的同时,还能避免机械臂转幅过大而导致机械臂倾斜以及振动现象发生,提高了混凝土泵车臂架使用时的安全性。
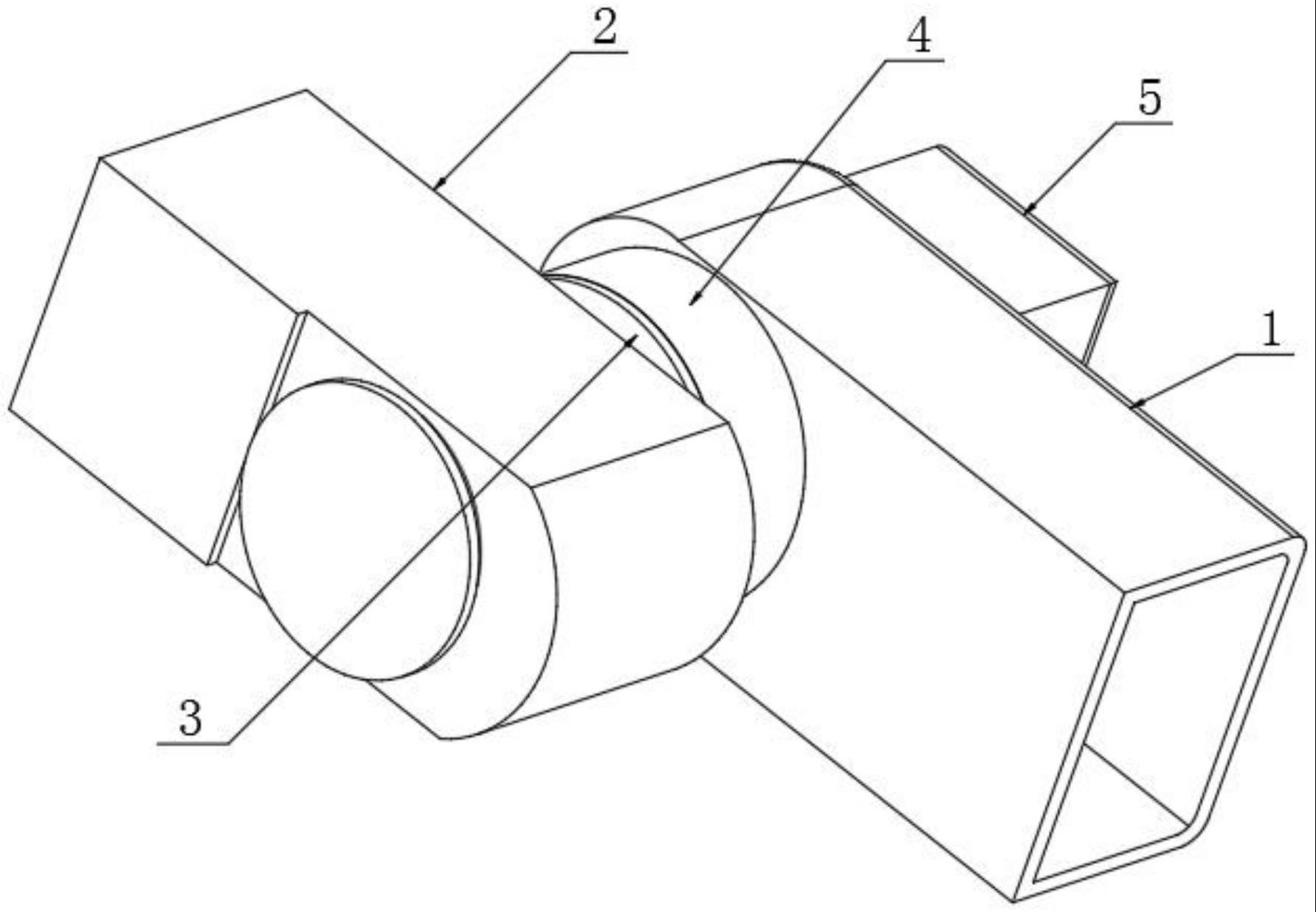
3、为实现上述目的,本实用新型提供如下技术方案:一种混凝土泵车臂架监测设备,包括第一机械臂,所述第一机械臂的一侧通过转轴安装有第二机械臂;所述第一机械臂的与所述转轴连接的一侧安装有套筒,所述转轴的外部固定连接有固定圈,所述固定圈和所述转轴均位于所述套筒的内部,所述固定圈的一侧分别安装有倾角传感器和振动传感器;
4、所述固定圈的外部设有环形凹槽,所述环形凹槽的内部安装有按键开关,所述按键开关通过导线电性连接有微型控制器,所述套筒的内壁固定连接有凸起块,所述凸起块的底部安装有滚轮,所述滚轮在所述环形凹槽内滑动。
5、优选的,所述微型控制器安装于所述第一机械臂远离所述套筒的一侧,所述倾角传感器和所述振动传感器的信号输出端均与所述微型控制器的信号输入端连接。
6、优选的,所述套筒远离所述第一机械臂的一端通过轴承转动安装于所述第二机械臂的外部。
7、优选的,所述环形凹槽的内部安装有限位块,所述限位块位于所述按键开关的一侧。
8、优选的,所述第一机械臂的一侧安装有控制盒,所述微型控制器位于所述控制盒的内部。
9、优选的,所述套筒优选为橡胶材质。
10、与现有技术相比,本实用新型的有益效果是:本实用新型中,通过在转轴外部固定圈上安装倾角传感器与振动传感器,用于监测机械臂操作时的倾斜状态和振幅,其中一个机械臂在液压驱动下绕转轴的转动幅度超过一定角度后,滚轮能够在固定圈的环形凹槽中滑动并触碰按键开关,由开关操控液压驱动机构停止运行,使本实用新型在对倾斜角度和振动进行监测的同时,还能够避免混凝土泵车的机械臂转幅过大而导致机械臂倾斜以及振动现象发生,提高了混凝土泵车臂架使用时的安全性。
技术特征:
1.一种混凝土泵车臂架监测设备,包括第一机械臂(1),所述第一机械臂(1)的一侧通过转轴(3)安装有第二机械臂(2),其特征在于:
2.根据权利要求1所述的一种混凝土泵车臂架监测设备,其特征在于:所述微型控制器(15)安装于所述第一机械臂(1)远离所述套筒(4)的一侧,所述倾角传感器(12)和所述振动传感器(13)的信号输出端均与所述微型控制器(15)的信号输入端连接。
3.根据权利要求1所述的一种混凝土泵车臂架监测设备,其特征在于:所述套筒(4)远离所述第一机械臂(1)的一端通过轴承(7)转动安装于所述第二机械臂(2)的外部。
4.根据权利要求1所述的一种混凝土泵车臂架监测设备,其特征在于:所述环形凹槽(14)的内部安装有限位块(9),所述限位块(9)位于所述按键开关(8)的一侧。
5.根据权利要求2所述的一种混凝土泵车臂架监测设备,其特征在于:所述第一机械臂(1)的一侧安装有控制盒(5),所述微型控制器(15)位于所述控制盒(5)的内部。
6.根据权利要求1所述的一种混凝土泵车臂架监测设备,其特征在于:所述套筒(4)优选为橡胶材质。
技术总结
本技术公开了一种混凝土泵车臂架监测设备,包括第一机械臂,所述第一机械臂的一侧通过转轴安装有第二机械臂;所述第一机械臂的与所述转轴连接的一侧安装有套筒,所述转轴的外部固定连接有固定圈,所述固定圈和所述转轴均位于所述套筒的内部,所述固定圈的一侧分别安装有倾角传感器和振动传感器;本技术中,其中一个机械臂在液压驱动下绕转轴的转动幅度超过一定角度后,滚轮能够在固定圈的环形凹槽中滑动并触碰按键开关,由开关操控液压驱动机构停止运行,使本技术在对倾角和振动进行监测的同时,还能够避免混凝土泵车的机械臂转幅过大而导致机械臂倾斜以及振动现象发生,提高了混凝土泵车臂架使用时的安全性。
技术研发人员:颜丙磊,刘乐,刘奎
受保护的技术使用者:江苏伦肯智能科技有限公司
技术研发日:20221215
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!