一种无人机机载传感器检测系统的制作方法
1.本实用新型涉及无人机机载传感器检测的技术领域,具体涉及一种无人机机载传感器检测系统。
背景技术:
2.本节中的陈述仅提供与本公开相关的背景信息,并且可能不构成现有技术。
3.无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。
4.现有无人机上安装有各种用于采集数据的机载传感器,例如:角速率传感器、油量传感器、磁航向传感器、动静压传感器以及垂直陀螺等;机载传感器的稳定工作对于无人机作业而言,是必不可少的;但是目前针对于机载传感器的检测设备大多仅具备单一检测功能,只能检测一类传感器,在无人机日常检修过程中,需要使用多种不同的检测设备进行检测,一方面增加了操作人员的设备携带量,另一方面也增加了检修时间和检修成本。
技术实现要素:
5.本实用新型的目的在于:针对目前无人机机载传感器仅具备单一检测功能,增加了操作人员的设备携带量、检修时间和检修成本的问题,提出了一种无人机机载传感器检测系统,满足系列无人机上的角速率传感器、油量传感器、磁航向传感器、垂直陀螺的检测要求,用于判断各传感器工作是否正常,能否正常使用或需要维修等,从而解决了上述问题。
6.本实用新型的技术方案如下:
7.一种无人机机载传感器检测系统,包括:
8.cpci控制器,所述cpci控制器起核心控制作用,并具有与各传感器通讯的端口,通过所述端口cpci控制器可获取各传感器的测量值;所述各传感器包括:角速率传感器、油量传感器、磁航向传感器、垂直陀螺;
9.三轴自动转台,所述三轴自动转台用于角速率传感器检测;三轴自动转台与cpci控制器通讯,通过cpci控制器控制三轴自动转台按照设定值转动;
10.油量传感器测试工装,所述油量传感器测试工装用于油量传感器检测;油量传感器测试工装与cpci控制器通讯,通过cpci控制器控制油量传感器测试工装按照设定值运动;
11.两轴无磁转台,所述两轴无磁转台用于磁航向传感器和垂直陀螺检测;两轴无磁转台与cpci控制器通讯,通过cpci控制器控制两轴无磁转台按照设定值转动;
12.所述cpci控制器通过比较设定值和测量值,判断各传感器是否工作正常。
13.进一步地,还包括:便携式电源;
14.所述便携式电源为角速率传感器、油量传感器、磁航向传感器、垂直陀螺供电。
15.进一步地,所述三轴自动转台,包括:
16.三轴转台,所述三轴转台包括:第一方位轴、第一俯仰轴和横滚轴;其中,所述横滚轴上设有用于安装角速率传感器的第一机械接口;
17.第一转台控制柜,所述第一转台控制柜与cpci控制器通讯,根据cpci控制器下发的控制指令控制第一方位轴、第一俯仰轴和横滚轴转动。
18.进一步地,所述油量传感器测试工装,包括:
19.底座,所述底座上设有用于安装油量传感器的支座;
20.直线运动滑台,所述直线运动滑台位于底座;直线运动滑台与cpci控制器通讯,根据cpci控制器下发的控制指令,控制直线运动滑台内的滑动件运动;
21.浮子夹持工装,所述浮子夹持工装安装在滑动件上,与滑动件同步运动;浮子夹持工装上设有用于夹持油量传感器浮子的夹持部,通过所述夹持部带动油量传感器浮子与滑动件同步运动。
22.进一步地,所述两轴无磁转台,包括:
23.两轴转台,所述两轴转台,包括:第二方位轴和第二俯仰轴;其中,所述第二方位轴上设有用于安装磁航向传感器或垂直陀螺的第二机械接口;
24.第二转台控制柜,所述第二转台控制柜与cpci控制器通讯,根据cpci控制器下发的控制指令控制第二方位轴和第二俯仰轴转动。
25.进一步地,还包括:液晶显示器模组;
26.所述液晶显示器模组与cpci控制器通讯。
27.进一步地,还包括:键盘鼠标模组;
28.所述键盘鼠标模组与cpci控制器通讯。
29.进一步地,还包括:atx电源;
30.所述atx电源为cpci控制器、三轴自动转台、油量传感器测试工装、两轴无磁转台、液晶显示器模组、键盘鼠标模组供电。
31.进一步地,所述cpci控制器包括:come模块。
32.进一步地,还包括:安装在come模块上的多串口卡和多功能卡。
33.与现有的技术相比本实用新型的有益效果是:
34.1、一种无人机机载传感器检测系统,包括:cpci控制器,所述cpci控制器起核心控制作用,并具有与各传感器通讯的端口,通过所述端口cpci控制器可获取各传感器的测量值;所述各传感器包括:角速率传感器、油量传感器、磁航向传感器、垂直陀螺;三轴自动转台,所述三轴自动转台用于角速率传感器检测;三轴自动转台与cpci控制器通讯,通过cpci控制器控制三轴自动转台按照设定值转动;油量传感器测试工装,所述油量传感器测试工装用于油量传感器检测;油量传感器测试工装与cpci控制器通讯,通过cpci控制器控制油量传感器测试工装按照设定值运动;两轴无磁转台,所述两轴无磁转台用于磁航向传感器和垂直陀螺检测;两轴无磁转台与cpci控制器通讯,通过cpci控制器控制两轴无磁转台按照设定值转动;所述cpci控制器通过比较设定值和测量值,判断各传感器是否工作正常;其单个系统即可满足系列无人机上的角速率传感器、油量传感器、磁航向传感器、垂直陀螺的检测要求,用于判断各传感器工作是否正常,能否正常使用或需要维修等;减少了设备携带量、检修时间和检修成本。
附图说明
35.图1为一种无人机机载传感器检测系统的原理图;
36.图2为三轴转台结构示意图;
37.图3为油量传感器测试工装结构示意图;
38.图4为两轴转台结构示意图;
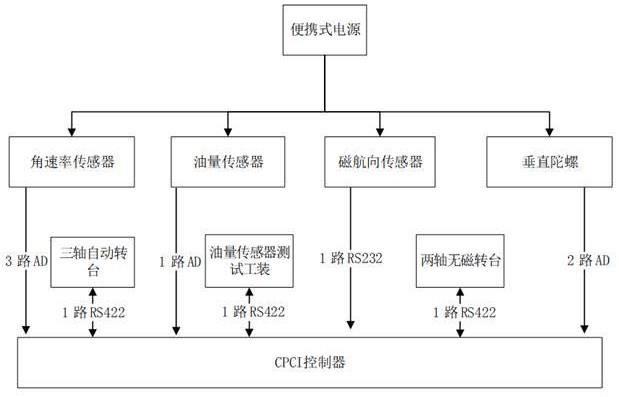
39.图5为一种无人机机载传感器检测系统的设备组成框架图。
40.附图标记:1-第一方位轴,2-第一俯仰轴,3-横滚轴,4-第一机械接口,5-底座,6-油量传感器,7-支座,8-直线运动滑台,9-滑动件,10-浮子夹持工装,11-夹持部,12-油量传感器浮子,13-第二方位轴,14-第二俯仰轴,15-第二机械接口。
具体实施方式
41.需要说明的是,术语“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
42.下面结合实施例对本实用新型的特征和性能作进一步的详细描述。
43.实施例一
44.现有无人机上安装有各种用于采集数据的机载传感器,例如:角速率传感器、油量传感器、磁航向传感器、动静压传感器以及垂直陀螺等;机载传感器的稳定工作对于无人机作业而言,是必不可少的;但是目前针对于机载传感器的检测设备大多仅具备单一检测功能,只能检测一类传感器,在无人机日常检修过程中,需要使用多种不同的检测设备进行检测,一方面增加了操作人员的设备携带量,另一方面也增加了检修时间和检修成本。
45.本实施例针对于上述问题,提出了一种无人机机载传感器检测系统,单系统即可满足系列无人机上的角速率传感器、油量传感器、磁航向传感器、垂直陀螺的检测要求,用于判断各传感器工作是否正常,能否正常使用或需要维修等。
46.请参阅图1-5,一种无人机机载传感器检测系统,具体包括如下结构:
47.cpci控制器,所述cpci控制器起核心控制作用,并具有与各传感器通讯的端口,通过所述端口cpci控制器可获取各传感器的测量值;所述各传感器包括:角速率传感器、油量传感器6、磁航向传感器、垂直陀螺;
48.三轴自动转台,所述三轴自动转台用于角速率传感器检测;三轴自动转台与cpci控制器通讯,通过cpci控制器控制三轴自动转台按照设定值转动;
49.油量传感器测试工装,所述油量传感器测试工装用于油量传感器6检测;油量传感器测试工装与cpci控制器通讯,通过cpci控制器控制油量传感器测试工装按照设定值运动;
50.两轴无磁转台,所述两轴无磁转台用于磁航向传感器和垂直陀螺检测;两轴无磁转台与cpci控制器通讯,通过cpci控制器控制两轴无磁转台按照设定值转动;
51.所述cpci控制器通过比较设定值和测量值,判断各传感器是否工作正常。
52.在本实施例中,具体的,还包括:便携式电源;
53.所述便携式电源为角速率传感器、油量传感器6、磁航向传感器、垂直陀螺供电。
54.请参阅图2,在本实施例中,具体的,所述三轴自动转台,包括:
55.三轴转台,所述三轴转台包括:第一方位轴1、第一俯仰轴2和横滚轴3;其中,所述横滚轴3上设有用于安装角速率传感器的第一机械接口4;其中,需要说明是的,对于三轴转台如何进行运转属于本领域常规技术手段,在此不再进行赘述;
56.第一转台控制柜,所述第一转台控制柜与cpci控制器通讯,根据cpci控制器下发的控制指令控制第一方位轴1、第一俯仰轴2和横滚轴3转动。
57.请参阅图3,在本实施例中,具体的,所述油量传感器测试工装,包括:
58.底座5,所述底座5上设有用于安装油量传感器6的支座7;
59.直线运动滑台8,所述直线运动滑台8位于底座5;直线运动滑台8与cpci控制器通讯,根据cpci控制器下发的控制指令,控制直线运动滑台8内的滑动件9运动;
60.浮子夹持工装10,所述浮子夹持工装10安装在滑动件9上,与滑动件9同步运动;浮子夹持工装10上设有用于夹持油量传感器浮子12的夹持部11,通过所述夹持部11带动油量传感器浮子12与滑动件9同步运动;优选地,如图3所示,所述夹持部11呈镂空状,与滑动件9铰链连接,在重力的作用下实现油量传感器浮子12的夹持;
61.请参阅图4,在本实施例中,具体的,所述两轴无磁转台,包括:
62.两轴转台,所述两轴转台,包括:第二方位轴13和第二俯仰轴14;其中,所述第二方位轴13上设有用于安装磁航向传感器或垂直陀螺的第二机械接口15;其中,需要说明是的,对于两轴无磁转台如何进行运转属于本领域常规技术手段,在此不再进行赘述;
63.第二转台控制柜,所述第二转台控制柜与cpci控制器通讯,根据cpci控制器下发的控制指令控制第二方位轴13和第二俯仰轴14转动。
64.在本实施例中,具体的,还包括:液晶显示器模组;
65.所述液晶显示器模组与cpci控制器通讯,用于图像显示;优选地,所述液晶显示器模组选择的型号为:友达的15寸液晶显示模组,产品型号为:g150xg01 v3,分辨率为:1024*768,工作温度范围:-30~+85℃;还可以在液晶显示器模组前端设计触摸屏,用于人机交互,增加系统的可操作性。
66.在本实施例中,具体的,还包括:键盘鼠标模组;
67.所述键盘鼠标模组与cpci控制器通讯,用于人机交互,主要作用是系统操控以及检测过程中各参数的输入;优选地,所述键盘鼠标模组选用键特的产品,型号为:k-tek-m282-dhp-fn-emc-151b,工作温度范围:-40~+85℃。
68.在本实施例中,具体的,还包括:atx电源;
69.所述atx电源为cpci控制器、三轴自动转台、油量传感器测试工装、两轴无磁转台、液晶显示器模组、键盘鼠标模组供电。
70.在本实施例中,具体的,所述cpci控制器包括:come模块;即所述cpci控制器采用come模块+主控载板的设计思路,将come模块的pcie总线、lvds显示接口、sata 硬盘接口、usb接口、以太网接口、vga显示接口、hdmi接口、电源管理接口等通过专用电路进行扩展,将其转换为符合标准的电气接口形式,引出若干cpci总线扩展插槽,便于扩展连接相关的外
设及部件;其中,come模块中的cpu模块选用的型号为:intel core i7 低功耗四核处理器,主频 2.8ghz。
71.在本实施例中,具体的,还包括:安装在come模块上的多串口卡和多功能卡;优选地,所述多串口卡和多功能卡通过cpci总线扩展插槽与come模块连接;
72.其中,多串口卡为三轴自动转台、两轴无磁转台、油量传感器测试工装提供1个rs422接口(3个设备复用),与之对接,对其进行控制和获取状态反馈信息;为磁航向传感器提供1个rs232接口;预留1个rs232串口,用户可接其他设备。
73.在检测过程中,例如:角速率传感器的检测;
74.首先,将角速率传感器安装在三轴自动转台上,通过转动三轴自动转台,带动其转动到设定的角度,通过软件读取角速率传感器采集值,转换为角度值,通过与三轴自动转台设定的角度值进行比对,来判断其功能是否正常。
75.按照对测试需求进行分析,系统总共需要提供3个串口,由于cpci控制器的前面板引出1路rs232,种类、数量均不够,所以需要扩展多串口卡实现这3路串口。
76.其中,多功能卡具有如下接口:
77.3路ad输入接口,用于采集角速率传感器的3个模拟量输出信号,其分别对应3个轴的角速率,测试时角速率传感器安装在三轴转台上,通过rs422控制转动三轴自动转台,带动其以设定的角速率进行转动,通过软件读取模拟量采集值,转换为角速率值,通过与三轴自动转台设定角速率值进行比对,来判断其功能是否正常。
78.1路ad 输入接口,用于采集油量传感器6的1个模拟量输出信号,其对应油量,测试时油量传感器6安装在油量传感器测试工装,测试台软件通过rs422控制滑动件9带动油量传感器浮子12运动并读取反馈值,通过模拟量输入采集油量传感器6输出的模拟信号并转换为角度值,将该值与油量传感器测试工装的反馈值进行比较,来判定油量传感器6的功能是否正常。
79.2路ad输入接口,用于采集垂直陀螺的模拟量输出信号,测试时垂直陀螺安装在两轴无磁转台上,通过rs422控制转动两轴无磁转台,带动其进行转动,通过软件读取模拟量采集值,转换为物理量,通过与两轴无磁转台的设定值进行比对,来判断其功能是否正常。
80.以上所述实施例仅表达了本技术的具体实施方式,其描述较为具体和详细,但并不能因此而理解为对本技术保护范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术技术方案构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。
81.提供本背景技术部分是为了大体上呈现本实用新型的上下文,当前所署名的发明人的工作、在本背景技术部分中所描述的程度上的工作以及本部分描述在申请时尚不构成现有技术的方面,既非明示地也非暗示地被承认是本实用新型的现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1