作业机械的制作方法
本发明涉及使用定位卫星系统来进行位置检测的作业机械。
背景技术:
1、近年来,在施工现场中推进了信息化施工的导入。信息化施工着眼于由调查、设计、施工、检查、管理等构成的一连串的工程工序中的施工,是通过应用电子数据和ict(information and communication technology:信息通信技术)来实现施工的高效化的系统。作为与信息化施工对应的机械,已知有以搭载指导功能或机器控制功能的液压挖掘机为代表的作业机械,指导功能为将车身位置或前部作业装置(有时也称为作业装置)的位置以及姿势与施工目标面的位置数据一并显示于监视器的功能,机器控制功能为以不使铲斗过度挖掘施工目标面的方式控制前部作业装置的功能。这种与信息化施工对应的作业机械基于具有三维坐标数据的信息化施工数据对操作员进行信息提示,来提供进行作业支援、驾驶支援的功能。例如在液压挖掘机的机器指导中,根据车身的位置以及姿势的数据或前部作业装置的姿势数据运算出铲斗前端位置,并经由监视器向操作员提示铲斗相对于施工目标面的位置。
2、有时在这种液压挖掘机搭载有卫星定位系统(例如gnss(global navigationsatellite system:全球定位卫星系统)),卫星定位系统为了运算全局坐标系(地理坐标系)中的上部旋转体(车身)的位置,经由安装于上部旋转体的定位天线接收来自定位卫星的定位信号,由此来运算上部旋转体的位置。然而,在液压挖掘机中,有时动臂、斗杆、铲斗等前部构件与卫星定位系统的定位天线相比位于上方,有时这些构件会妨碍接收直线路径上的定位信号。在这种情况下,定位天线将被称为多路径的衍射波或反射波作为定位信号进行接收的可能性很高。若接收衍射波或反射波并用于定位运算则定位结果包含误差的可能性变高。
3、于是,作为尝试减小多路径的影响的技术,例如有专利文献1。在专利文献1中公开了一种gps接收机的控制装置,其在数据库中针对每个规定区域存储表示基于gps接收机的周围的电波障碍物的配置等规定的gps卫星的选择规则的遮蔽范围(遮蔽信息),从该数据库获取与gps信号的接收地域对应的遮蔽范围,从在天空中航行的多个gps卫星中的位于该遮蔽范围外的gps卫星中选择用于定位的gps卫星。
4、现有技术文献
5、专利文献
6、专利文献1:jp特开2004-184121号公报
技术实现思路
1、专利文献1中记载的技术仅设想了不移动的电波障碍物,而没有涉及在像液压挖掘机的前部作业装置这种可能会移动的电波障碍物位于定位天线的周围的情况下的遮蔽范围。也就是说,要提高作业机械的领域中的卫星定位精度,则设定考虑了作为会移动的电波障碍物的前部作业装置的姿势的遮蔽范围尤为重要。
2、于是,若与前部作业装置的姿势变化对应地每次都变更卫星选择所利用的遮蔽范围(或者使其变化)则应该能够抑制定位精度的下降,但并没有这么简单。首先,在作业机械中,由于使前部作业装置动作来进行作业,所以会频繁地进行前部作业装置的姿势变更(例如动臂的抬升下降动作)。若配合该姿势变更而变更遮蔽范围,则定位运算所利用的卫星会频繁切换,将遮蔽范围变更反而招致使定位精度下降的可能性。另外,若在定位运算能够利用的卫星极端少的情况下利用与前部作业装置的姿势对应的遮蔽范围,则会出现就连这么少卫星也变得无法用于定位的时间段,因此,也有不使用遮蔽范围反而会抑制定位精度下降的情况。
3、像这样在可能成为电波障碍物的前部作业装置的姿势在作业中会频繁变化的作业机械中,有在对位于存在前部作业装置的区域的卫星进行定位运算时仅单纯将前部作业装置排除则无法抑制作业中的定位精度下降的情况。
4、此外,以上主要涉及了因卫星配置引起的定位精度下降,但除上述问题以外,例如还会因卫星数量或卫星信号的sn比(信号与噪声之比)引起定位精度下降。
5、本发明是鉴于上述问题而提出的,其目的在于,提供一种能够抑制卫星定位的精度随着作业装置的动作下降的作业机械。
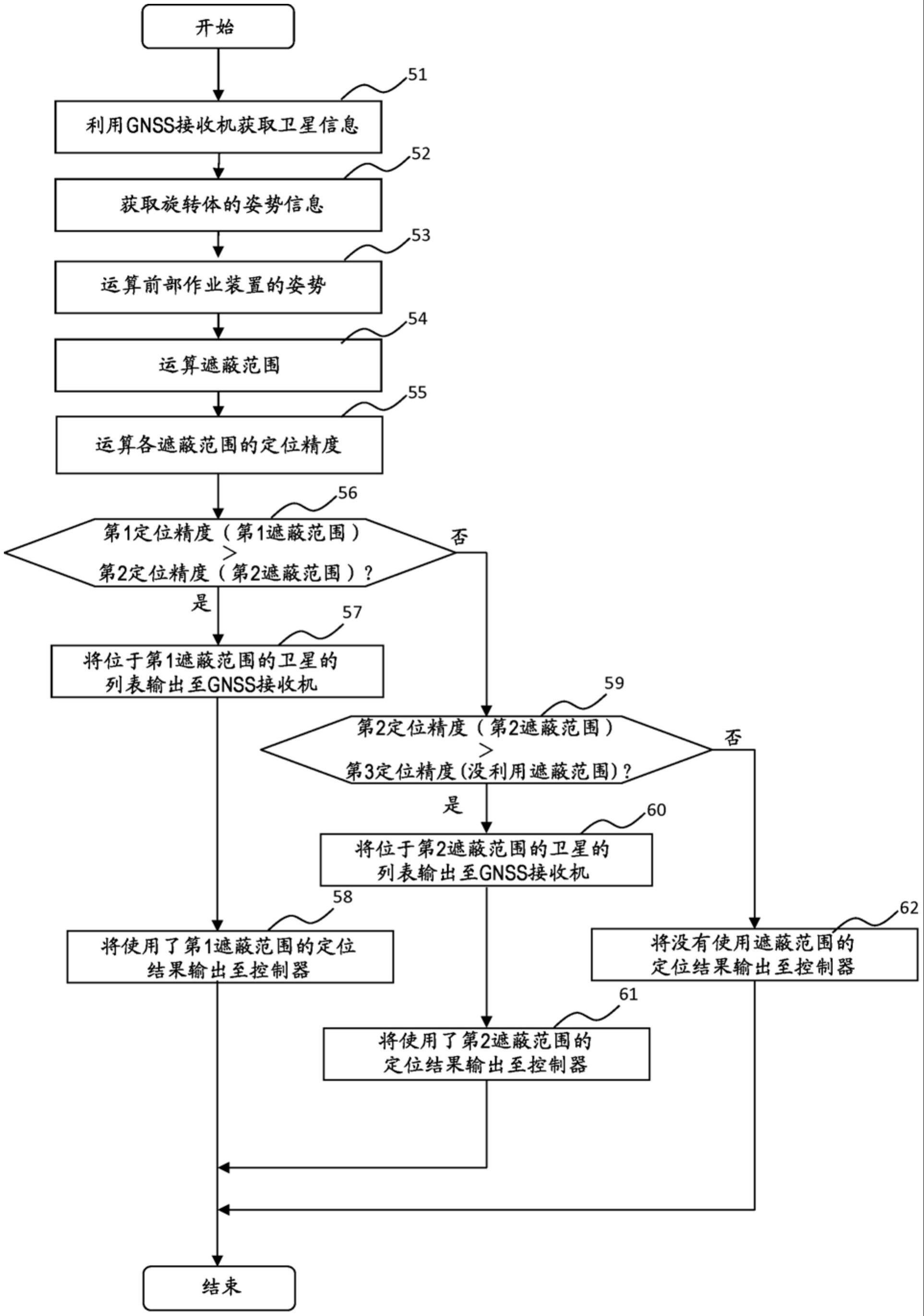
6、本申请包含解决上述课题的手段,举出其中一例,作业机械具备:下部行驶体;可旋转地安装在所述下部行驶体之上的上部旋转体;安装于所述上部旋转体的多关节型的作业装置;用于检测所述作业装置以及所述上部旋转体的姿势的多个姿势传感器;安装于所述上部旋转体且用于接收来自多个定位卫星的卫星信号的定位天线;基于利用所述定位天线接收的卫星信号对所述定位天线的位置进行运算的接收机;以及基于所述多个姿势传感器的检测信号对所述作业装置的姿势和所述上部旋转体的姿势进行运算的控制器,作业机械的特征在于,在所述控制器存储有多个遮蔽范围,该多个遮蔽范围是为了选择由所述接收机对所述定位天线的位置进行的运算所利用的定位卫星,基于所述作业装置以及所述上部旋转体的姿势以所述定位天线为基准而设定的,所述控制器基于选择出的所述定位卫星的卫星关联数据对包含利用所述多个遮蔽范围的每一个选择了定位卫星的情况下分别的定位精度、以及不利用所述多个遮蔽范围中的任一个选择了定位卫星的情况下的定位精度在内的多个定位精度进行运算,所述接收机基于所述多个定位精度中定位精度为最高的情况下选择出的所述定位卫星的卫星信号,对所述定位天线的位置进行运算。
7、发明效果
8、根据本发明,即使随着前部作业装置的动作反映了前部作业装置的姿势的遮蔽范围发生变化,也会选择出定位精度最高的遮蔽范围。由此,能够抑制定位精度随着作业装置的动作而下降,能够提高基于作业机械的作业精度。
技术特征:
1.一种作业机械,其具备:
2.根据权利要求1所述的作业机械,其特征在于,
3.根据权利要求2所述的作业机械,其特征在于,
4.根据权利要求2或者3所述的作业机械,其特征在于,
5.根据权利要求2或者3所述的作业机械,其特征在于,
6.根据权利要求5所述的作业机械,其特征在于,
7.根据权利要求6所述的作业机械,其特征在于,
8.根据权利要求1所述的作业机械,其特征在于,
9.根据权利要求1所述的作业机械,其特征在于,
技术总结
在作业机械所具备的控制器存储有多个遮蔽范围,该多个遮蔽范围用于选择由接收机对天线的位置进行的运算所利用的定位卫星,且基于作业装置以及旋转体的姿势以天线为基准来设定。控制器基于利用多个遮蔽范围的每一个选择出的定位卫星的卫星关联数据、和不利用多个遮蔽范围中的任一个而选择出的定位卫星的卫星关联数据分别运算多个定位精度。接收机基于运算出的所述多个定位精度中定位精度为最高的情况下选择出的定位卫星的卫星信号对天线的位置进行运算。
技术研发人员:李惠贞,小竹伸一,泉枝穗,石原新士
受保护的技术使用者:日立建机株式会社
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!