确定移动设备的位置信息的制作方法
发明领域本发明一般涉及无线通信领域,尤其涉及确定移动设备的位置信息。相关技术描述随着移动设备的激增,标识精确定位信息(例如,到厘米级准确度)已变得日益期望。不同技术(诸如,精确点定位(ppp)和实时运动学(rtk))可用于标识精确定位信息。然而,这些技术可能具有不同缺点。例如,常规ppp技术可能需要很长时间来收敛。作为另一示例,rtk可使用相对大量的数据。简要概述根据本公开,一种用于确定ppp位置的示例移动设备包括gnss接收机、存储器、以及与该gnss接收机和该存储器通信地耦合的一个或多个处理单元。该一个或多个处理单元被配置成:经由gnss接收机获得一个或多个全球导航卫星系统(gnss)信号;基于一个或多个位置源来获得位置信息,其中该位置信息指示移动设备的位置;基于该位置信息和该一个或多个gnss信号来确定移动设备的一个或多个精确点定位(ppp)位置,其中位置信息的位置不确定性满足或低于不确定性阈值;确定至少一个ppp位置是否满足或低于一个或多个收敛阈值;以及响应于确定至少一个ppp位置满足或低于一个或多个收敛阈值而提供该至少一个ppp位置。根据本公开的一种确定精确点定位(ppp)位置的示例方法,包括:由移动设备获得一个或多个全球导航卫星系统(gnss)信号;由移动设备基于一个或多个位置源来获得位置信息,其中该位置信息指示移动设备的位置;基于该位置信息和该一个或多个gnss信号来确定移动设备的一个或多个精确点定位(ppp)位置,其中位置信息的位置不确定性满足或低于不确定性阈值;确定至少一个ppp位置是否满足或低于一个或多个收敛阈值;以及响应于确定至少一个ppp位置满足或低于一个或多个收敛阈值而提供该至少一个ppp位置。根据本公开的一种用于确定ppp位置的示例移动设备,包括:用于获得一个或多个全球导航卫星系统(gnss)信号的装置;用于基于一个或多个位置源来获得位置信息的装置,其中该位置信息指示移动设备的位置;用于基于该位置信息和该一个或多个gnss信号来确定移动设备的一个或多个精确点定位(ppp)位置的装置,其中位置信息的位置不确定性满足或低于不确定性阈值;用于确定至少一个ppp位置是否满足或低于一个或多个收敛阈值的装置;以及用于响应于确定至少一个ppp位置满足或低于一个或多个收敛阈值而提供该至少一个ppp位置的装置。根据本公开的一种存储用于确定ppp位置的指令的示例非瞬态计算机可读介质。这些指令包括用于以下操作的代码:获得一个或多个全球导航卫星系统(gnss)信号;基于一个或多个位置源来获得位置信息,其中该位置信息指示移动设备的位置;基于该位置信息和该一个或多个gnss信号来确定移动设备的一个或多个精确点定位(ppp)位置,其中位置信息的位置不确定性满足或低于不确定性阈值;以及响应于确定至少一个ppp位置满足或低于一个或多个收敛阈值而提供该至少一个ppp位置。
背景技术:
技术实现思路
技术特征:
1.一种用于确定精确点定位(ppp)位置的移动设备,包括:
2.如权利要求1所述的移动设备,其中所述一个或多个位置源包括以下各项中的一者或多者:无线基站、无线接入点(ap)、超宽带(uwb)设备、射频(rf)感测设备、lidar设备、或物联网(iot)设备。
3.如权利要求2所述的移动设备,其中所述无线基站提供实时运动学(rtk)位置信息。
4.如权利要求3所述的移动设备,其中所述一个或多个处理单元被进一步配置成基于所述rtk位置信息来确定rtk位置。
5.如权利要求1所述的移动设备,其中为了获得所述位置信息,所述一个或多个处理单元被进一步配置成使用以下各项来确定所述位置信息:第五代(5g)信号、uwb信号、wifi信号、精细定时测量(ftm)或者其任何组合。
6.如权利要求1所述的移动设备,其中所述位置信息由所述移动设备在车联网(v2x)消息中接收。
7.如权利要求1所述的移动设备,其中所述一个或多个gnss信号是多星座和多频带信号。
8.如权利要求1所述的移动设备,其中所述不确定性阈值基于:所述移动设备的设备类型、在所述移动设备上执行的应用的应用类型、由所述移动设备所请求的准确度、由在所述移动设备上执行的应用所请求的准确度、预定阈值、或其任何组合。
9.如权利要求1所述的移动设备,其中所述不确定性阈值在10厘米与30厘米之间。
10.如权利要求1所述的移动设备,其中所述不确定性阈值在30厘米与50厘米之间。
11.如权利要求1所述的移动设备,其中为了确定所述一个或多个ppp位置,所述一个或多个处理单元被进一步配置成约束与卡尔曼过滤器相关联的协方差矩阵。
12.如权利要求11所述的移动设备,其中为了确定所述一个或多个ppp位置是否满足或低于所述一个或多个收敛阈值,所述一个或多个处理单元被进一步配置成确定所述协方差矩阵的值是否在时间窗口上改变。
13.如权利要求1所述的移动设备,其中为了确定所述一个或多个ppp位置,所述一个或多个处理单元被进一步配置成使用所述位置信息来重采样由粒子过滤器使用的粒子。
14.如权利要求1所述的移动设备,其中为了确定所述位置信息,所述一个或多个处理单元被配置成:
15.如权利要求1所述的移动设备,其中为了确定所述位置信息,所述一个或多个处理单元被配置成:
16.如权利要求15所述的移动设备,其中为了确定所述位置信息,所述一个或多个处理单元被配置成从所述移动设备的存储器检索所述位置源设备的所存储位置。
17.如权利要求15所述的移动设备,其中所述消息指示所述位置源设备的标识符。
18.如权利要求1所述的移动设备,其中为了获得所述位置信息,所述一个或多个处理单元被配置成:
19.如权利要求18所述的移动设备,其中为了确定是否要向所述一个或多个位置源设备请求所述位置信息,所述一个或多个处理单元被配置成基于以下各项来选择至少一个位置源设备:由所述至少一个位置源设备提供的位置信息的准确度、指示由所述至少一个位置源设备提供的所述位置信息的所述位置不确定性满足或低于所述不确定性阈值的信息、由所述至少一个位置源设备提供的位置信息的成本、或其任何组合。
20.如权利要求18所述的移动设备,其中为了请求所述位置信息,所述一个或多个处理单元被进一步配置成请求位置信息以使得所述位置信息的所述位置不确定性满足或低于所述不确定性阈值。
21.一种确定精确点定位(ppp)位置的方法,包括:
22.如权利要求21所述的方法,进一步包括基于从无线基站接收到的rtk位置信息来确定rtk位置。
23.如权利要求21所述的方法,其中确定所述位置信息包括:
24.如权利要求21所述的方法,其中确定所述位置信息包括:
25.如权利要求24所述的方法,其中确定所述位置信息包括从所述移动设备的存储器检索所述位置源设备的所存储位置。
26.如权利要求24所述的方法,其中所述消息指示所述位置源设备的标识符。
27.如权利要求21所述的方法,其中获得所述位置信息包括:
28.如权利要求27所述的方法,其中确定是否要向所述一个或多个位置源设备请求所述位置信息包括基于以下各项来选择至少一个位置源设备:由所述至少一个位置源设备提供的位置信息的准确度、指示由所述至少一个位置源设备提供的所述位置信息的所述位置不确定性满足或低于所述不确定性阈值的信息、由所述至少一个位置源设备提供的位置信息的成本、或其任何组合。
29.一种用于确定精确点定位(ppp)位置的移动设备,包括:
30.一种存储用于确定精确点定位(ppp)位置的指令的非瞬态计算机可读介质,所述指令包括用于以下操作的代码:
技术总结
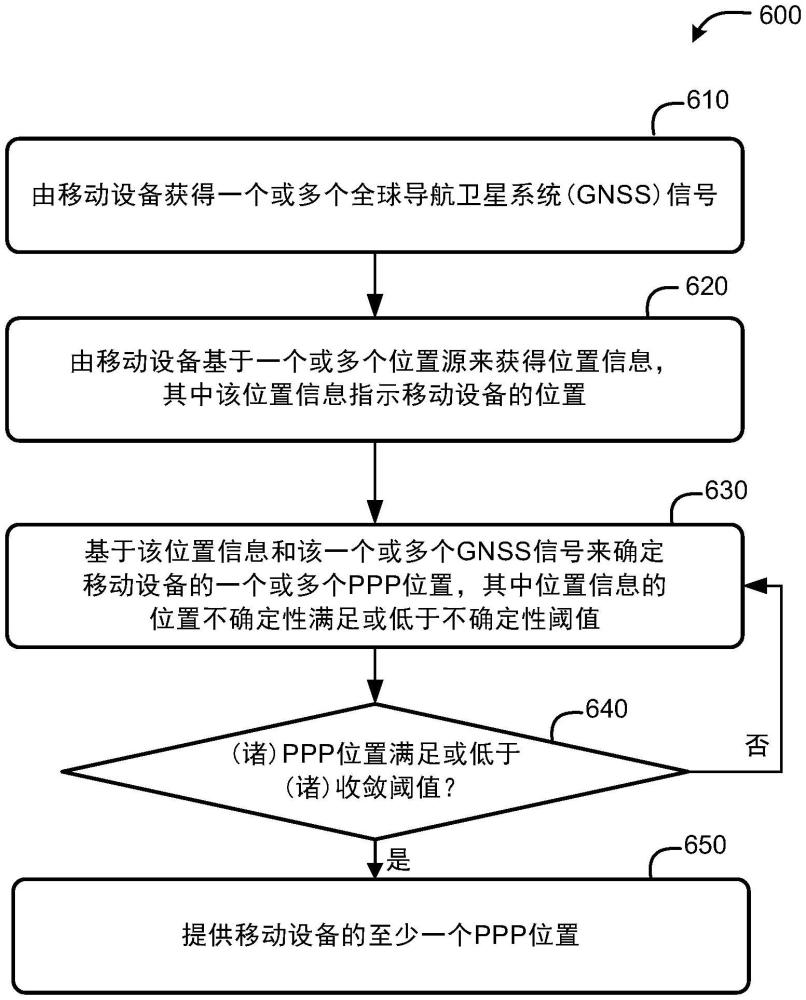
公开了一种精确点定位(PPP)系统,其中移动设备获得一个或多个全球导航卫星系统(GNSS)信号。该移动设备可基于一个或多个位置源来获得位置信息,其中该位置信息指示移动设备的位置。基于该位置信息和该一个或多个GNSS信号可确定移动设备的一个或多个PPP位置,其中该位置信息的位置不确定性满足或低于不确定性阈值。可以确定至少一个PPP位置是否满足或低于一个或多个收敛阈值。响应于确定至少一个PPP位置满足或低于该一个或多个收敛阈值,可提供该至少一个PPP位置。
技术研发人员:彭宇翔,M·王,N·罗,G·张
受保护的技术使用者:高通股份有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!