三维测距模块以及三维测距系统的制作方法
本公开涉及三维测距模块以及三维测距系统。
背景技术:
1、曾有一种利用tof(time of flight:飞行时间)来测量到对象物的距离的测距摄像装置(tof相机)等。
2、例如在专利文献1中,tof相机具备三维测距模块,该三维测距模块具有光源、透镜模块、以及保持透镜模块的透镜基底。在该tof相机中通过由透镜模块接收从光源照射的光,并根据从照射直到接受到光的时间差来算出距离,据此来测量到对象物的距离。
3、(现有技术文献)
4、(专利文献)
5、专利文献1日本特开2019-191173号公报
技术实现思路
1、发明要解决的问题
2、但是,为了保护透镜模块,会有三维测距模块具有位于对象物与透镜模块之间的透镜盖的情况。在这种情况下,就会出现算错距离的情况。
3、于是,本公开提供一种距离误计算的发生得到了抑制的三维测距模块等。
4、用于解决问题的手段
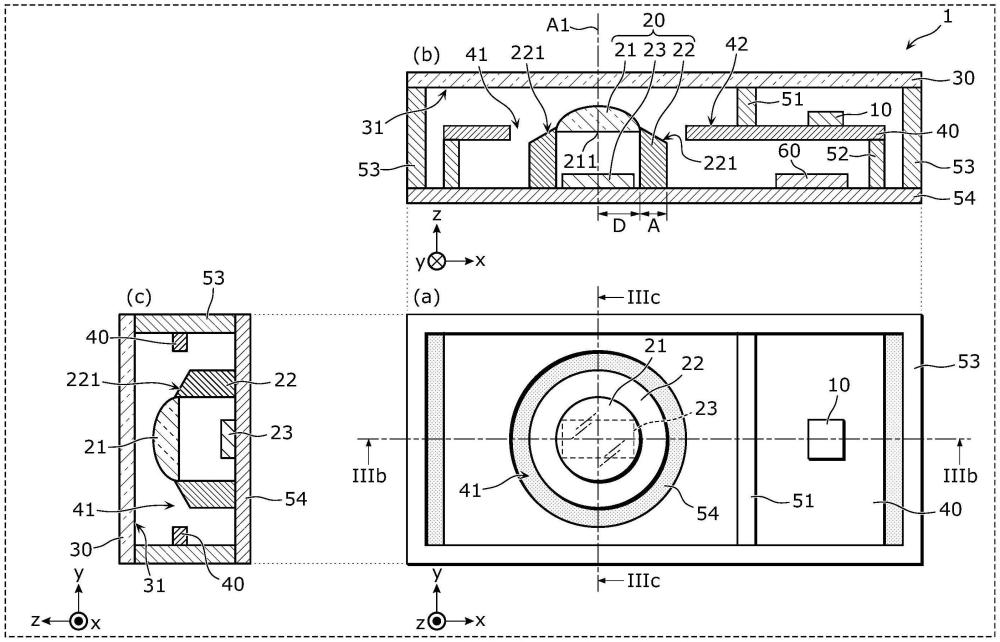
5、本公开的三维测距模块具有:光源,照射激光光束;透镜模块,所述透镜模块包括透镜、摄像元件、以及镜筒,所述透镜对被照射的所述激光光束在对象物反射后的光进行聚光,所述摄像元件接受由所述透镜聚光后的光,所述镜筒圈围所述透镜以及所述摄像元件之间的空间,且支承所述透镜;以及透镜盖,位于所述透镜模块与所述对象物之间,且针对所述激光光束的波长为透明,在以包括所述透镜的光轴的面来剖切所述镜筒时的剖视图中,所述镜筒的与所述对象物相对的第1面包括第1倾斜部,该第1倾斜部随着远离所述光轴,向远离所述透镜盖的方向倾斜。
6、并且,本公开的三维测距模块具有:光源,照射激光光束;透镜,对被照射的所述激光光束在对象物反射后的光进行聚光;摄像元件,接受由所述透镜聚光后的光;透镜盖,位于所述透镜与所述对象物之间,且针对所述激光光束的波长为透明;以及一部件,在所述透镜的所述光轴的方向上,从所述透镜盖来看所述透镜的情况下,该部件具有一开口,所述透镜在该开口内,在以包括所述光轴的面来剖切所述透镜时的剖视图中,将所述透镜的外端与所述开口的外端之间的距离设为b,将所述透镜盖与所述透镜的中心的距离设为h1,将所述透镜盖与所述部件的和所述透镜盖相对的第2面的距离设为h2,将连结所述透镜的所述中心和所述摄像元件的外端的线、与所述光轴所成的角度设为θ,此时满足(h1+h2)·tanθ≤b的关系。
7、并且,本公开的三维测距模块具有:光源,照射激光光束;透镜模块,所述透镜模块包括透镜、摄像元件、以及镜筒,所述透镜对被照射的所述激光光束在对象物反射后的光进行聚光,所述摄像元件接受由所述透镜聚光后的光,所述镜筒圈围所述透镜以及所述摄像元件之间的空间,且支承所述透镜;以及透镜盖,位于所述透镜模块与所述对象物之间,且针对所述激光光束的波长为透明,所述透镜盖的与所述透镜模块相对的第3面包括第3倾斜部,所述第3倾斜部随着远离所述透镜的光轴,向远离所述透镜模块的方向倾斜。
8、并且,本公开的三维测距系统具备以上所述的三维测距模块,所述三维测距模块具有运算部,该运算部根据所述激光光束的行走时间,计算从所述光源到所述对象物的距离。
9、另外,这些概括性的或具体的方式可以由系统、方法、集成电路、计算机程序或计算机可读的cd-rom等记录介质来实现,也可以由系统、方法、集成电路、计算机程序以及记录介质的任意的组合来实现。
10、发明效果
11、通过本公开的一个方式所涉及的三维测距模块等,能够抑制距离误计算的发生。
技术特征:
1.一种三维测距模块,
2.如权利要求1所述的三维测距模块,
3.如权利要求1或2的任一项所述的三维测距模块,
4.如权利要求3所述的三维测距模块,
5.如权利要求1至4的任一项所述的三维测距模块,
6.如权利要求1至5的任一项所述的三维测距模块,
7.如权利要求1或2所述的三维测距模块,
8.如权利要求7所述的三维测距模块,
9.如权利要求1至8的任一项所述的三维测距模块,
10.如权利要求1至9的任一项所述的三维测距模块,
11.一种三维测距模块,
12.如权利要求11所述的三维测距模块,
13.如权利要求11或12所述的三维测距模块,
14.一种三维测距模块,
15.如权利要求14所述的三维测距模块,
16.如权利要求14或15所述的三维测距模块,
17.如权利要求14至16的任一项所述的三维测距模块,
18.如权利要求14至17的任一项所述的三维测距模块,
19.如权利要求14至18的任一项所述的三维测距模块,
20.一种三维测距系统,
技术总结
三维测距模块(1)具备照射激光光束的光源(10)、透镜模块(20)、以及位于透镜模块(20)与对象物之间的对激光光束的波长为透明的透镜盖(30),透镜模块(20)包括:透镜(21),对被照射的激光光束在对象物反射后的光进行聚光;摄像元件(23)接受由透镜(21)聚光后的光;以及镜筒(22),圈围透镜(21)以及摄像元件(23)之间的空间并支承透镜(21),在以包括透镜(21)的光轴(A1)的面来剖切镜筒(22)时的剖视图中,镜筒(22)的与对象物相对的第1面(221)包括随着远离光轴(A1)而向远离透镜盖(30)的方向倾斜的第1倾斜部。
技术研发人员:中野慎吾,浅野拓也,林茂生
受保护的技术使用者:新唐科技日本株式会社
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!