采用机器人嗅探检漏器的自动检漏方法与流程
本发明涉及一种检漏器,用于检测测试对象中发生的泄漏。
背景技术:
1、例如,专利de 10 2005 022 156 a1(英福康公司;inficon)描述了一种检漏器。该检漏器包括探针,其嗅探针尖设置于测试对象的预定测试区域。所述测试对象中填充有测试气体,例如,氦气。逸出的测试气体由基本单元通过嗅探针尖吸入,并供应给测试气体检测器,例如该检测器可配置为质谱仪。
2、当使用检漏器时,测试对象(例如空调系统或冰箱的制冷单元)中填充有测试气体;可以使用嗅探探针来检测测试气体是否从测试对象中逸出。在测试某行业的产品质量时,嗅探针尖设置于测试对象中可能存在泄漏的特定测试区域。此处,所述探针被手动移动到该测试区域。在此过程中,很难检测到嗅探针尖是否已经移动到测试对象的所有相关测试区域。操作员可能无意中忽略某些测试区域或跳过根据其主观评估认为可能为非关键区域的其他测试区域。
3、专利号为4,945,305(阿森松公司;ascension)的美国专利描述了一种定位系统,包括用于产生脉冲直流磁场的发射器和设置在对象上的接收器。这种方法对于确定当前位置、将其与期望位置进行比较并反馈特别有用。所述发射器和所述接收器之间的视线内的非磁性对象不会造成干扰。由于待测试的布置是静态的,因此可以通过校准消除由大量可磁化材料(如压缩机块和制冷机)造成的残余干扰。这种方法已被证明对本公开的实施特别有用。
4、专利wo 2009/016160 a1描述了一种检漏器,包括一个通过管道连接到探针的基本单元。所述嗅探针尖位于测试区或测试对象的测试区域上。在测试气体从测试对象逸出的情况下,由所述基本单元中的测试气体检测器进行检测。提供了一种定位系统,包括发射器、设置在所述探针中的接收器,以及供应和评估单元。因此,监视并确认在各个测试区域中是否存在所述嗅探探针。
5、使用3d传感器获取物理对象的数字数据,从而获得三维虚拟空间中的点云在自动化领域中是已知的,其中,每个点代表所述物理对象外表面上的一个面点。自动化行业中使用的机器人,例如,在汽车等产品的自动化制造中使用的机器人,是通过使用了获取的数字数据的软件算法进行控制的。这通常是为了感知整个物理对象的外周长或表面,以便定位、抓住、移动或重新定位该对象,或者例如,在车辆制造业中通过喷漆机械臂对该对象的外表面进行喷涂。
6、对换热设备,如冰箱、空调系统、热泵等进行的嗅探检漏是换热设备质量检测的一部分。操作人员必须直观地识别换热器上的相关测试区域(例如,载液管道),并将所述探针手动地、逐个移动到测试区域。在换热设备上进行的这种嗅探检漏非常耗时,并且容易出现人为因素失误,例如跳过测试区域或未将嗅探探针置于足够靠近测试区域的位置。
技术实现思路
1、本发明建立在换热设备的载流元件中提供更可靠的、更快检测到的泄漏的对象的基础上。
2、本发明的方法由独立权利要求1的特征定义。
3、相应地,将机器人引导的探针的探针针尖移动到使用机器人进行检测的测试位置(步骤a);到达测试位置后,气体或空气通过所述探针针尖进行抽吸并提供给气体检测器,该气体检测器记录吸入气体的测量信号(步骤b)。在至少一个第一时间点获取测量信号的至少一个第一测量值(步骤c)。所述探针针尖通常在接近测试位置时吸入气体或周围空气,并且在到达测试位置时不仅被激活。此外,获取第一测量时间并将其分配给所述第一测量值(步骤d)。最后,再获取与所述第一测量时间相对应的所述探针的第一测量位置(步骤e)。因此,获取到位置数据,该位置数据指示所述探针的部件,例如,所述探针针尖,在所述第一测量时间获取的位置。因此,气体测量的每个信号值i被分配测量的时间t和位置或空间(x,y,z)中的位置i(t,x,y,z)。如果需要,还可以沿着所述探针获得两个空间角φ和θ形式的空间角坐标和轴的距离r(r,φ,θ),或者将其作为笛卡尔(cartesian)坐标系统的空间坐标的替代。在至少一个随后的第二测量时间内重复这些步骤(步骤f),其中,根据本发明将测量值与每个测量位置相关联,以便能够使用所述测量值来评估检测到所述测量信号的极值的测量位置,该极值能够表明检测到了所述测试对象中存在可能的泄漏(步骤g)。通过这种方式,可以使用机器人进行全自动检漏,而无需人类用户执行评估、操作和/或检漏或其中的各个步骤。
4、在执行步骤e)之后、执行步骤f)之前,所述机器人可以将所述探针针尖移动到另一测试位置,以便对另一测试位置重复所述测量。作为替代或补充,可以在所述探针针尖从所述机器人移动到另一测试位置后重复执行步骤b)至g)。例如,所述探针针尖的测量位置优选地通过3d传感器进行检测,该3d传感器可以是具有至少一个光学相机和优选地具有至少一个照明设备的成像系统。
5、在所述测量信号的记录过程中,所述机器人可以移动所述探针,从而在测量过程中连续采用不同的测量位置。获得的测量值可以用作所述探针的测量位置和/或所述探针的移动速度的函数。优选地,基于所述探针针尖的测量位置对所述测量信号进行评估。
6、有利地,在同一测量位置进行至少两次测量,并对获得的测量值进行比较。
7、可以基于所述探针在测量期间的移动速度对所述测量信号进行评估。
8、当所述探针被移动到测试位置,在进行测量之前,可以通过使用所述气体检测器在已知不存在示踪气体和/或存在恒定背景浓度的位置获取测量信号来将探针信号归零。
9、或者在自所述探针针尖到所述测试位置的路径上距离所述测试位置足够远的位置进行信号调零,从而确定背景信号(调零)。
10、检漏系统可以通过将所述探针移动到一个泄漏率已知且被定义的点(例如,测试泄漏点)来执行校准。
11、所述探针可以移动到先前测量中确定存在或疑似存在泄漏的测量位置,以便在所述测量位置进行控制测量。
12、优选地,先前测量中假定存在泄漏的测量位置被标记。
13、所述探针吸入的气流的进给率可以作为所述探针的移动速度的函数进行调节。
14、例如,气体检漏器可以是嗅探检漏器,其嗅探探针具有嗅探针尖,通过该嗅探针尖吸入气体。作为替代方案,气体检漏器可以包括测试气体探针,所述检漏器针尖包括用于测试气体的气体检测器。
技术特征:
1.一种采用机器人气体检漏器(56)的自动检漏方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的检漏方法,其特征在于,在执行步骤e)之后、步骤f)之前,所述机器人(32)将所述探针针尖(25)移动到另一测试位置(20)。
3.根据权利要求1或2所述的检漏方法,其特征在于,在所述机器人(32)将所述探针针尖(25)移动到另一测试位置(20)后,重复步骤b)至g)。
4.根据前述权利要求中任一项所述的检漏方法,其特征在于,根据步骤e),使用3d传感器检测所述探针(22)的所述测量位置。
5.根据前述权利要求中任一项所述的检漏方法,其特征在于,根据步骤e),从携带所述探针的所述机器人(32)的手臂(30)的已知位置推断出所述探针(22)的所述测量位置。
6.根据前述权利要求中任一项所述的检漏方法,其特征在于,在采集所述测量信号的过程中,由所述机器人(32)移动所述探针(22),从而连续取得不同的测量位置。
7.根据前述权利要求中任一项所述的检漏方法,其特征在于,获得的测量值用作所述探针(22)的测量位置和/或所述探针(22)的移动速度的函数。
8.根据前述权利要求中任一项所述的检漏方法,其特征在于,基于所述探针针尖(25)的测量位置对所述测量信号进行评估。
9.根据前述权利要求中任一项所述的检漏方法,其特征在于,在同一测量位置进行至少两次测量,并对获得的测量值进行比较。
10.根据前述权利要求中任一项所述的检漏方法,其特征在于,基于所述探针(22)在测量期间的移动速度对所述测量信号进行评估。
11.根据前述权利要求中任一项所述的检漏方法,其特征在于,在执行步骤a)的过程中、执行步骤b)之前,通过所述气体检测器(24)获取测量信号并将其存储为背景信号,从而以调零的方式对所述探针(22)进行校准。
12.根据前述权利要求中任一项所述的检漏方法,其特征在于,将所述探针(22)移动到先前确定存在泄漏的测量位置,以便在所述测量位置进行控制测量。
13.根据前述权利要求中任一项所述的检漏方法,其特征在于,先前测量中假定存在泄漏的测量位置被标记。
14.根据前述权利要求中任一项所述的检漏方法,其特征在于,基于所述探针(22)的移动速度对所述探针(22)吸入的气流的进给率进行调节。
15.根据前述权利要求中任一项所述的检漏方法,其特征在于,所述气体检漏器为嗅探检漏器;所述探针为嗅探探针;所述探针针尖为嗅探针尖。
技术总结
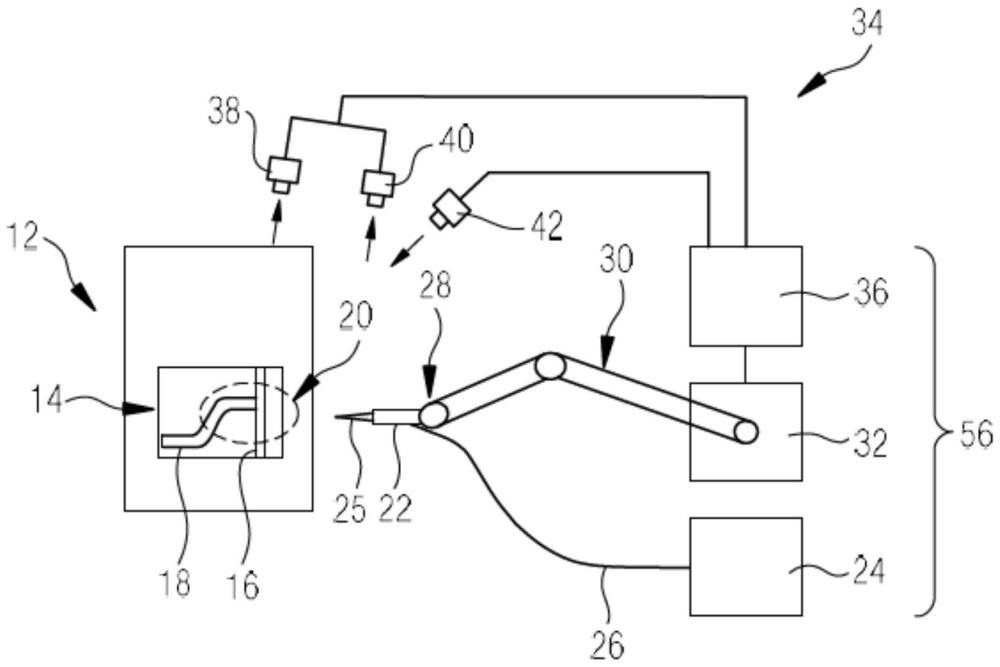
本发明涉及一种采用机器人气体检漏器(56)的自动检漏方法,包括以下步骤:a)使用机器人(32)将由所述机器人(32)引导的探针(22)的探针针尖(25)移动到测试位置(20);b)通过气体检测器(24)记录由所述探针针尖(25)记录的气体的测量信号;c)在至少一个第一测量时间检测所述测量信号的至少一个第一测量值;d)检测所述第一测量时间,并将所述第一测量时间分配给所述第一测量值;e)检测并分配与所述第一测量时间相对应的所述探针(22)的第一测量位置;f)在至少一个随后的第二测量时间内重复步骤a)至e);g)将所述测量值与所述探针(22)的每个测量位置相关联,以便能够使用所述测量值来评估检测到所述测量信号的极值的测量位置,该极值能够表明检测到了所述测试对象中存在可能的泄漏。
技术研发人员:丹尼尔·维茨格,西尔维奥·德克尔,约亨·柯尼格·普哈拉,埃里克·罗尔夫,沃尔克·特里博
受保护的技术使用者:英福康有限责任公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!