一种高反射率表面物体三维轮廓的结构光测量方法
本发明涉及一种物体三维轮廓的测量方法,具体是一种用于金属等具有高反射率表面物体三维轮廓的结构光测量方法。
背景技术:
1、结构光三维轮廓测量是一种通过辅助的结构光照明获取物体三维轮廓的技术,该技术利用投影仪向测量场景中的待测物体投射具有一定编码信息的条纹图案,通过成像设备采集待测物体表面调制过的条纹进行解码处理,结合投影仪和成像设备标定的位置关系,可以获取物体的三维空间坐标信息,包括纹理特征、颜色信息等。
2、在智能制造的大背景下,人们对产品质量要求越来越高,对产品表面缺陷容忍度也越来越低。为了精确制造预设物体,除了需要获取物体表面缺陷的二维分布外,还要精确测得缺陷的深度或高度信息,这些数据对产品生产工艺的调整具有重要的指导意义。结构光三维轮廓测量具有无接触、精度高、抗干扰等特点,已广泛应用于轮廓测量。然而,对于金属等具有高反射率表面的物体,由于其表面的反射率很高,导致摄像机在记录信息时得到的图片上某一部分过亮或者过暗,由于在对获取的图像进行处理时需依赖所记录的图片上各像素点的光强信息,因此这部分过亮或过暗的区域对三维轮廓的测量与重建会造成较大的影响,最终导致重建效果与测量结果出现极大的偏差。为解决此问题,国内外提出了许多解决方案,如利用彩色结构光,通过对不同颜色曝光强度的调控实现去高光,但该方法既需要多颜色的光源,还需要多个测量相机,不利于系统的集成;加装偏振片,利用偏振片法,削弱强反射光,但是由于增加的偏振片不仅削弱了强反射光的光强,同时也削弱了漫反射的光强,从而导致图像中噪声的影响加大,并且加装偏振片也增加了整个光学测量系统的复杂程度。
技术实现思路
1、本发明所要解决的技术问题是,针对现有技术的不足,提供一种高反射率表面物体三维轮廓的结构光测量方法。
2、本发明解决上述技术问题所采用的技术方案为:一种高反射率表面物体三维轮廓的结构光测量方法,包括以下步骤:
3、s1、通过黑白投影仪对高反射率表面物体投射均匀的白亮光,调整并设定白亮光的光强和黑白相机的曝光时间,拍摄得到最大灰度值不超过254的多幅图像,从该多幅图像中选出最大灰度值最接近254的一幅图像,记下所选图像的最大灰度值imax和曝光时间t0,进入步骤s2;
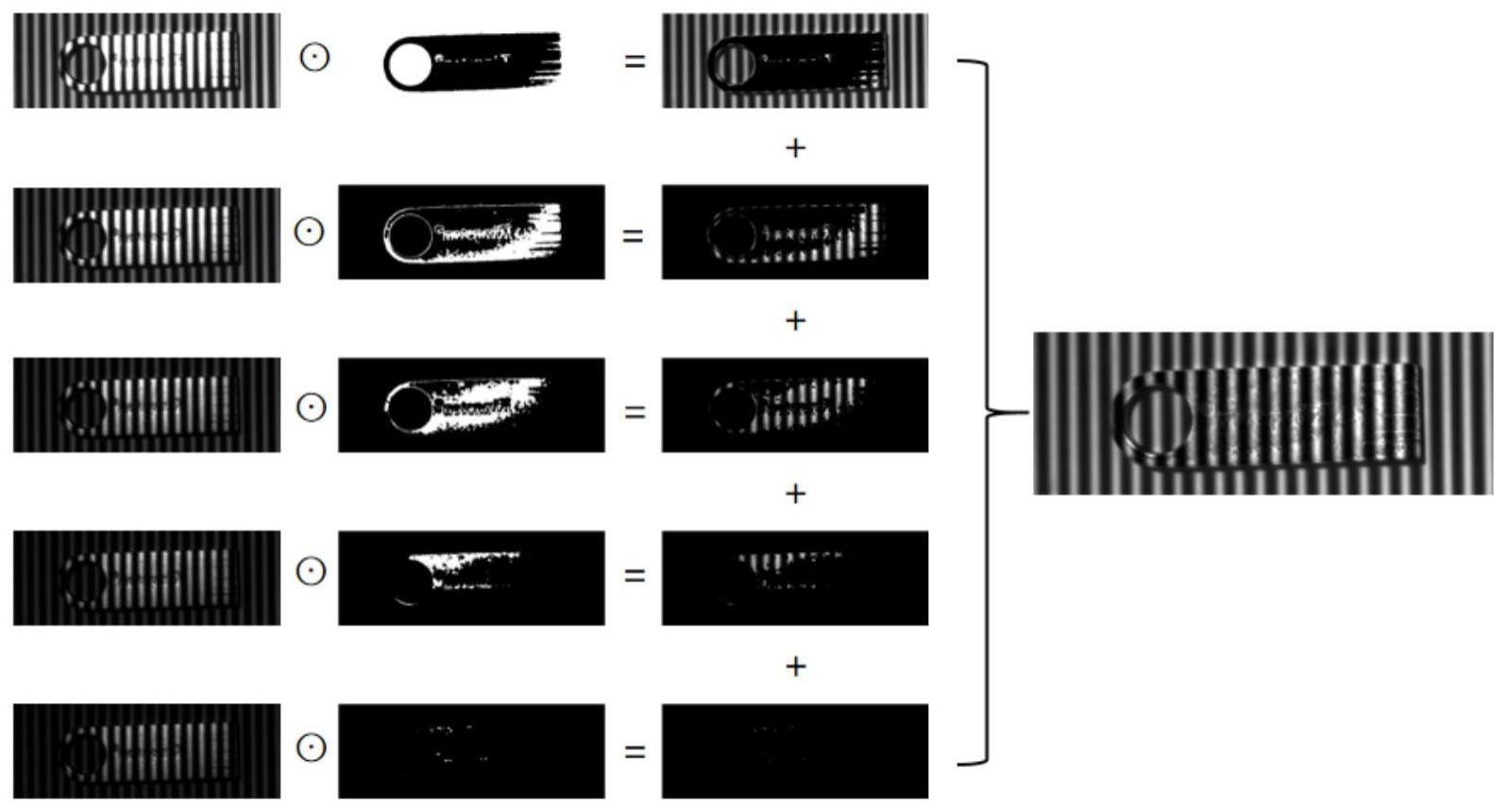
4、s2、将所选图像中像素点的灰度值记为i(x,y),其中(x,y)为像素点的坐标,按照各个像素点的灰度值,生成五组与图像大小一致的0-1矩阵,并将像素点分成五类,具体的生成规则为:将灰度值在[0,54]的像素点分为第一类像素点,生成对应的0-1矩阵m1,第一类像素点的位置对应矩阵位置的元素值设为1,在另外四组矩阵中的相同位置的元素值为0;将灰度值在[55,104]的像素点分为第二类像素点,生成对应的0-1矩阵m2,第二类像素点的位置对应矩阵位置的元素值设为1,在另外四组矩阵中的相同位置的元素值为0;将灰度值在[105,154]的像素点分为第三类像素点,生成对应的0-1矩阵m3,第三类像素点的位置对应矩阵位置的元素值设为1,在另外四组矩阵中的相同位置的元素值为0;将灰度值在[155,204]的像素点分为第四类像素点,生成对应的0-1矩阵m4,第四类像素点的位置对应矩阵位置的元素值设为1,在另外四组矩阵中的相同位置的元素值为0;将灰度值在[205,254]的像素点分为第五类像素点,生成对应的0-1矩阵m5,第五类像素点的位置对应矩阵位置的元素值设为1,在另外四组矩阵中的相同位置的元素值为0;
5、s3、由于相机拍摄到的光强与相机的曝光时间t0呈线性关系,确定使图像的最大灰度值imax到达254的曝光时间t,t由下式确定:
6、
7、s4、对于第一类像素点~第五类像素点,分别取其最大的灰度值,确定对应的五种曝光时间t1~t5,t1~t5分别为:
8、
9、s5、利用黑白投影仪,在每种曝光时间下分别向高反射率表面物体投射四步相移的条纹图案,总共得到二十幅变形条纹图案,求每幅变形条纹图案与对应0-1矩阵的哈达玛积,再将对应相位的五幅变形条纹图相加,得到四幅合成后的变形条纹图,对其进行四步相移法解包裹相位求出物体表面高度,最终还原出高反射率表面物体的三维轮廓。
10、与现有技术相比,本发明具有如下优点:
11、(1)本发明在四步相移的重建方法上提出并加入了曝光时间调整与像素分类合成的方法,通过调整曝光时间控制采集条纹的光强,再通过像素分类合成的方法,利用生成的0-1矩阵,将不同光强的像素点进行合成,最终合成出四幅条纹图案,再利用合成后的图案求解出包含物体高度信息的相位,根据参考相位,重建出物体的三维轮廓像。结果表明本发明方法可以有效解决金属等高反射率表面物体的反射问题,避免出现相机过曝,可实现对高反射率表面物体三维轮廓的准确还原。
12、(2)本发明测量方法对设备要求简单,成本低,无需使用偏振片、彩色投影仪等设备,仅需黑白相机和黑白投影仪,结合四步相移法,能够有效去除变形条纹图像中高光饱和部分,减少三维重建中的误差,同时所获得的变形条纹图有较好的信噪比,增强了对于高反射率表面物体的三维轮廓的测量能力。
13、(3)本发明测量方法的步骤简单,无需对多颜色图像进行集成,便于实施。
技术特征:
1.一种高反射率表面物体三维轮廓的结构光测量方法,其特征在于包括以下步骤:
技术总结
本发明公开了一种高反射率表面物体三维轮廓的结构光测量方法,在四步相移的重建方法上提出并加入了曝光时间调整与像素分类合成的方法,通过调整曝光时间控制采集条纹的光强,再通过像素分类合成的方法,利用生成的0‑1矩阵,将不同光强的像素点进行合成,最终合成出四幅条纹图案,再利用合成后的图案求解出包含物体高度信息的相位,根据参考相位,重建出物体的三维轮廓像。结果表明本发明方法可以有效解决金属等高反射率表面物体的反射问题,避免出现相机过曝,可实现对高反射率表面物体三维轮廓的准确还原。本发明测量方法对设备要求简单,成本低,仅需黑白相机和黑白投影仪并结合四步相移法,步骤简单,无需对多颜色图像进行集成,便于实施。
技术研发人员:何人及,宋宝安,胡海玲,刘欣丽,王莹莹,陈一帆
受保护的技术使用者:宁波大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!