一种表面检测工业机器人及自动化生产线
本发明涉及自动化生产领域,具体而言,涉及一种表面检测工业机器人及自动化生产线。
背景技术:
1、传统的自动化产线一般采用生产与检测分开的模式,在自动化生产环节,完成产品生产后,再被转送至检测环节进行检测,通常情况下,检测环节中需要人工进行操作。
2、以上方式无法充分发挥自动化生产的优势,检测环节在一定程度上对生产的高效进行造成了限制。
3、有鉴于此,特提出本申请。
技术实现思路
1、本发明的第一个目的在于提供一种表面检测工业机器人,其能够将产品检测和自动化生产有机结合起来,有效提高生产和检测的协调性,提升产品检测的效率,使其与自动化生产的匹配度得到提高。
2、本发明的第二个目的在于提供一种自动化生产线,其能够将产品检测和自动化生产有机结合起来,有效提高生产和检测的协调性。
3、本发明的实施例是这样实现的:
4、一种表面检测工业机器人,其包括:第一传送带、检测台、第二传送带和检测板。
5、检测台设于第一传送带和第二传送带之间,检测台设于第一传送带的尾端,检测台设于第二传送带的头端。
6、检测板用于与待检物件相抵,检测板的板面具有第一抵接柱和第二抵接柱,第一抵接柱设于检测板的中部,第二抵接柱设于检测板的边缘并沿检测板的周向分布。第一抵接柱和第二抵接柱的端面相互平齐且均与检测板的板面平行。
7、第一抵接柱具有沿其径向设置的激光发射器,激光发射器由驱动器驱动,以使激光发射器能够沿第一抵接柱的周向转动。
8、检测板还具有检测环,检测环与检测板同轴设置,检测环的内侧设置有用于检测由激光发射器所发射出的激光的光敏组件,光敏组件沿检测环的周向分布。
9、检测台的一侧固定安装有用于与待检物件相抵的阻挡部。
10、进一步地,光敏组件沿检测环的周向连续式分布。
11、进一步地,沿第一抵接柱的轴向,激光发射器的位置可调。沿检测环的轴向,检测环的位置可调。
12、进一步地,第一抵接柱套设有转动套,第一抵接柱的端面露出于转动套之外。转动套可转动地配合于第一抵接柱并由驱动器驱动,激光发射器安装于转动套。
13、进一步地,第一抵接柱和第二抵接柱均为压力传感器。
14、进一步地,检测台的宽度小于待检物件的宽度。
15、进一步地,检测板具有内腔,内腔沿平行于检测板的板面的方向延伸。内腔中容纳有压力检测模块和配重件。
16、配重件的外径小于内腔的内径,配重件的两端分别与内腔的两端相接触。
17、压力检测模块设于内腔的侧壁并沿内腔的周向间隔设置,配重件的侧壁与压力检测模块贴合。
18、检测板具有第一转轴和第二转轴,第一转轴和第二转轴均平行于检测板的板面设置,且第一转轴和第二转轴相垂直。
19、进一步地,内腔的内壁和配重件的外表面均做光滑处理。
20、进一步地,压力检测模块为四组,四组压力检测模块沿内腔的周向均匀间隔设置。配重件的中心轴线与内腔的中心轴线重合设置。当配重件的中心轴线沿竖直方向设置时,四组压力检测模块检测到的压力数值相同。
21、一种自动化生产线,其包括:上述的表面检测工业机器人。
22、本发明实施例的有益效果是:
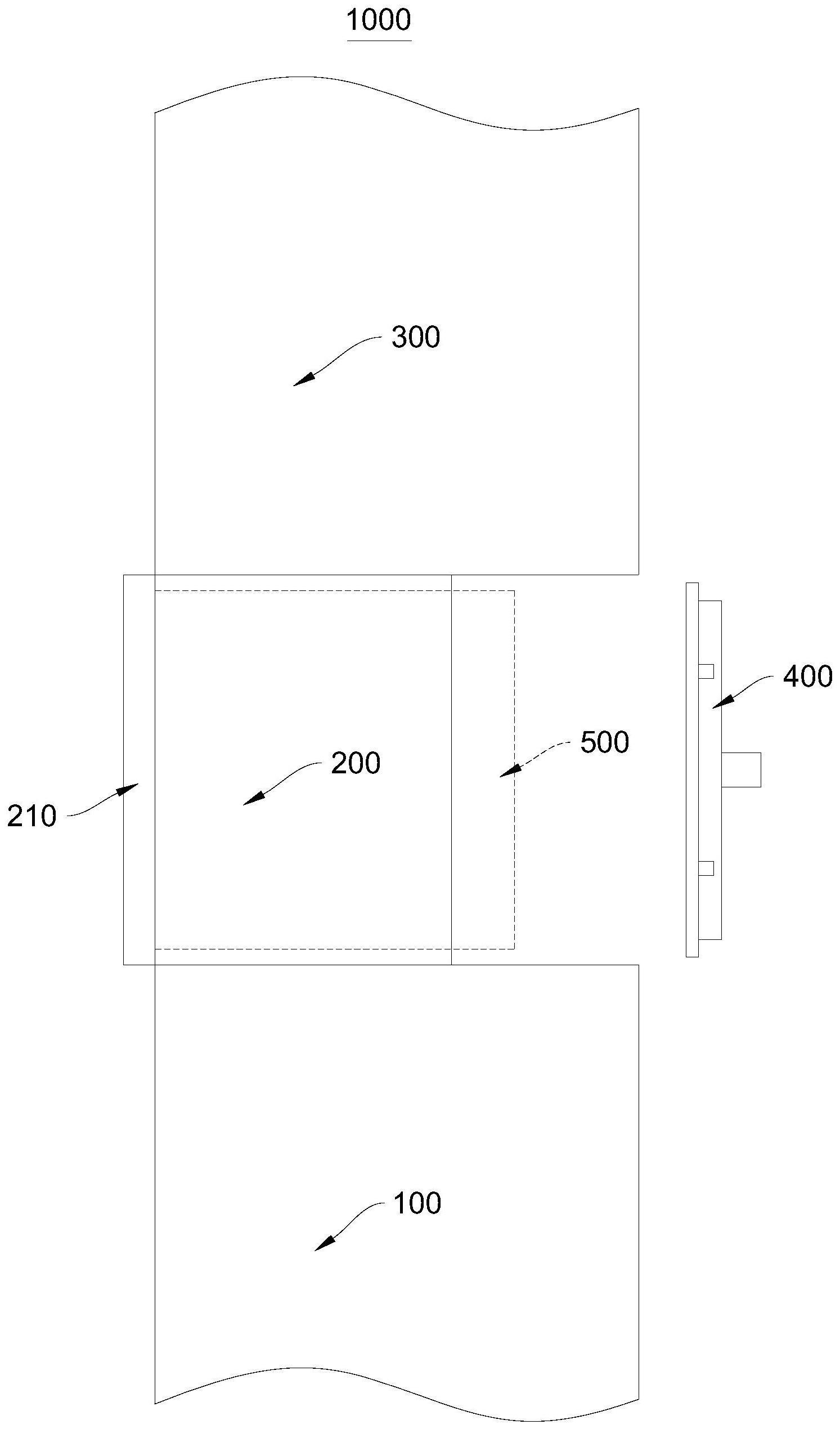
23、本发明实施例提供的表面检测工业机器人1000在工作过程中,待检物件由第一传送带100输送至检测台200上,此时,驱动检测板400使检测板400与待检物件的侧壁相抵,检测板400通过第一抵接柱410和第二抵接柱420与待检物件的侧壁相抵,待检物件被抵接于阻挡部210和检测板400之间。
24、由于检测台200的宽度小于待检物件,待检物件的一部分伸出于检测台200之外,这样的话,刚好为检测环480让位,由于检测环480的内径比待检物件大,使检测环480能够环设于待检物件。
25、沿第一抵接柱410的轴向,激光发射器411的位置可调。沿检测环480的轴向,检测环480的位置可调。这样可以根据实际需要灵活地控制在第一抵接柱410和第二抵接柱420与待检物件相抵时,激光发射器411与待检物件表面之间的距离,通过调节检测环480的位置,使其与激光发射器411的位置相适配,能够检测到激光发射器411发出的激光,并且使激光发射器411沿第一抵接柱410的周向转动时,能够持续检测到激光发射器411的激光。
26、这样的话,当检测板400与待检物件相抵后,利用驱动器控制激光发射器411沿第一抵接柱410的周向转动,如果检测环480的光敏组件能够始终检测到激光发射器411发射出的激光(第二抵接柱420对激光的阻挡除外),那表明待检物件的这个侧面的平整度是符合要求的。因此,可以通过调节检测板400与待检物件相抵时激光发射器411与待检物件之间的距离,来满足对不同平整度要求的检测。
27、在初始状态下,可以通过第一转轴460和第二转轴470调节检测板400,使配重件450的中心轴线竖直,从而使各个压力检测模块440的数值相同。如果检测板400发生倾斜,各个压力检测模块440与配重件450之间的作用力会发生变化,根据配重件450的重量以及各个压力检测模块440的压力数值情况,可以确定检测板400的倾斜程度和倾斜方向。
28、当检测板400与待检物件相抵时,根据压力检测模块440的压力数值情况来判断检测板400的倾斜程度和倾斜方向,从而反应待检物件的侧面的倾斜情况,以此来判断待检物件的侧面倾斜程度是否符合要求。
29、为了提高检测灵敏度,四个压力检测模块440的设置方式满足以下要求:若检测板400只沿第一转轴460转动,只有一组压力检测模块440的压力数值发生变化;若检测板400只沿第二转轴470转动,只有另一组压力检测模块440的压力数值发生变化。
30、另外,第一抵接柱410和第二抵接柱420均为压力传感器,当检测板400通过第一抵接柱410和第二抵接柱420与待检物件相抵时,根据第一抵接柱410和第二抵接柱420的压力数值可以初步判断检测板400是否与待检物件充分贴合,以及待检物件的表面是否平整。
31、当检测板400与待检物件相抵之后,第一抵接柱410和第二抵接柱420均检测到压力,则表明第一抵接柱410和第二抵接柱420均与待检物件表面相抵,若第一抵接柱410和第二抵接柱420的压力数值相同,则表明待检物件与第一抵接柱410、第二抵接柱420接触的部位是平整的。
32、这样的话,检测板400能够对待检物件的侧面平整度和倾斜程度进行全面评价。
33、总体而言,本发明实施例提供的表面检测工业机器人能够将产品检测和自动化生产有机结合起来,有效提高生产和检测的协调性,提升产品检测的效率,使其与自动化生产的匹配度得到提高。本发明实施例提供的自动化生产线能够将产品检测和自动化生产有机结合起来,有效提高生产和检测的协调性。
技术特征:
1.一种表面检测工业机器人,其特征在于,包括:第一传送带、检测台、第二传送带和检测板;
2.根据权利要求1所述的表面检测工业机器人,其特征在于,所述光敏组件沿所述检测环的周向连续式分布。
3.根据权利要求1所述的表面检测工业机器人,其特征在于,沿所述第一抵接柱的轴向,所述激光发射器的位置可调;沿所述检测环的轴向,所述检测环的位置可调。
4.根据权利要求1所述的表面检测工业机器人,其特征在于,所述第一抵接柱套设有转动套,所述第一抵接柱的端面露出于所述转动套之外;所述转动套可转动地配合于所述第一抵接柱并由所述驱动器驱动,所述激光发射器安装于所述转动套。
5.根据权利要求1所述的表面检测工业机器人,其特征在于,所述第一抵接柱和所述第二抵接柱均为压力传感器。
6.根据权利要求1所述的表面检测工业机器人,其特征在于,所述检测台的宽度小于待检物件的宽度。
7.根据权利要求1所述的表面检测工业机器人,其特征在于,所述检测板具有内腔,所述内腔沿平行于所述检测板的板面的方向延伸;所述内腔中容纳有压力检测模块和配重件;
8.根据权利要求7所述的表面检测工业机器人,其特征在于,所述内腔的内壁和所述配重件的外表面均做光滑处理。
9.根据权利要求7所述的表面检测工业机器人,其特征在于,所述压力检测模块为四组,四组所述压力检测模块沿所述内腔的周向均匀间隔设置;所述配重件的中心轴线与所述内腔的中心轴线重合设置;当所述配重件的中心轴线沿竖直方向设置时,四组所述压力检测模块检测到的压力数值相同。
10.一种自动化生产线,其特征在于,包括:如权利要求1~9任一项所述的表面检测工业机器人。
技术总结
一种表面检测工业机器人及自动化生产线,涉及自动化生产领域。包括第一传送带、检测台、第二传送带和检测板。检测台设于第一传送带和第二传送带之间。检测板的板面具有第一抵接柱和第二抵接柱,第一抵接柱设于检测板的中部,第二抵接柱设于检测板的边缘并沿检测板的周向分布。第一抵接柱和第二抵接柱的端面相互平齐且均与检测板的板面平行。第一抵接柱具有沿其径向设置的激光发射器,激光发射器由驱动器驱动,以使激光发射器能够沿第一抵接柱的周向转动。检测板还具有检测环,检测环的内侧设置有用于检测由激光发射器所发射出的激光的光敏组件。其能够将产品检测和自动化生产有机结合起来,有效提高生产和检测的协调性。
技术研发人员:杨晓勇,周家领,雷勇,成靖文,沈义伦
受保护的技术使用者:眉山职业技术学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!