一种基于FFT累加的分段均值恒虚警检测方法与流程
本发明涉及无人机侦测,具体地说,涉及一种基于fft累加的分段均值恒虚警检测方法。
背景技术:
1、恒虚警率(constantfalsealarmrate,cfar)处理是一种提供自适应检测门限的信号处理技术,在恒虚景概率检测的条件下,幅度检测到的动态阈值的取值与噪声功率有关。传统的cfar包括ca-cfar、so-cfar、go-cfar、有序统计平均(orderedstatisticcellaveraging,osca)cfar、有序统计选大(orderedstatisticgreatestof,osgo)cfar、有序统计选小(orderedstatisticsmallestof,osso)cfar,广泛应用于雷达探测、无线电信号监测、光电跟踪等领域。
2、在恒虚警概率检测的条件下,幅度检测的动态阈值的取值仅由噪声的方差决定。因此动态阈值的检测问题主要在于噪声的动态检测问题。针对无人机遥控无线电信号、飞机图传信号、导航信号等信号进行门限动态检测,往往采用恒虚警技术先对采集到的无人机信号在时域或者频域进行噪声提取,然后进行门限判决和参数测量从而进行目标识别。
3、常规恒虚警噪声提取时,常在检测单元前、后沿各设置一个覆盖若干距离单元的滑动窗,利用滑动窗中参考采样的均值,形成前、后沿局部估计,再对局部估计平均、选大,选小或加权平均,以确定检测单元的背景杂波平均估计。针对无人机遥控信号,往往伴随着导航,手机通信,wifi,等非均匀杂波,由于噪声方差波动较大,在信噪比较低时,采用传统恒虚警动态阈值检测技术,计算复杂,且目标检测概率较低。
技术实现思路
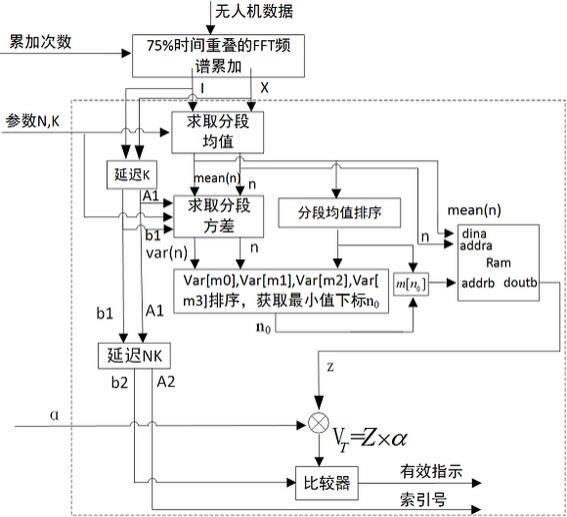
1、本发明针对现有的恒虚警动态阈值检测技术具有计算复杂且目标检测概率较低的问题,提出一种基于fft累加的分段均值恒虚警检测方法,首先通过将采集的无人机数字信号进行75%时间重叠fft频谱累加处理,然后采用分段均值恒虚警算法进行动态门限检测,计算出恒虚景门限vt,比较当前频点的数据帧与恒虚景门限vt的大小,输出大于恒虚景门限vt的频点的索引号和数据帧,提高了噪声门限获取的准确性和信号检测的灵敏度,解决了噪声方差波动较大的问题,实现了更远距离的目标检测。
2、本发明具体实现内容如下:
3、一种基于fft累加的分段均值恒虚警检测方法,将采集的无人机数字信号进行75%时间重叠fft频谱累加处理,然后采用分段均值恒虚警算法进行动态门限检测,计算出恒虚景门限vt,比较当前频点的数据帧与恒虚景门限vt的大小,输出大于恒虚景门限vt的频点的索引号和数据帧。
4、为了更好地实现本发明,进一步地,所述方法具体包括以下步骤:
5、步骤1:将采集的无人机数字信号进行75%时间重叠fft变换;
6、步骤2:将75%时间重叠fft变换后的无人机数字信号进行频谱累加处理;
7、步骤3:采用分段均值恒虚警算法进行动态门限检测,提取累加后的无人机数字信号的恒虚警阈值;
8、步骤4:根据恒虚警阈值计算出最终的恒虚景门限vt;
9、步骤5:比较当前频点的数据帧与恒虚景门限vt的大小,输出大于恒虚景门限vt的频点的索引号和数据帧。
10、为了更好地实现本发明,进一步地,所述步骤1的具体包括以下步骤:
11、步骤11:将无人机数字信号划分为四路并行的无人机数字信号;
12、步骤12:根据无人机数字信号的数据帧流水深度,将四路无人机数字信号依次延迟四分之一流水深度,得到四路75%时间重叠无人机数字信号;
13、步骤13:将四路75%时间重叠无人机数字信号同时进行fft变换,得到四路fft无人机数字信号和与四路fft无人机数字信号对应的四路数据帧、四路索引号。
14、为了更好地实现本发明,进一步地,所述步骤2的具体操作为:将四路fft无人机数字信号时序对齐并进行求模运算,根据索引号对应的频点的位置,将四路fft无人机数字信号的数据帧进行累加求和,得到累加后的fft无人机数字信号的数据帧x和索引号i。
15、为了更好地实现本发明,进一步地,所述步骤3具体包括以下步骤:
16、步骤31:根据设定的分段数n、分段点数k和索引号i,按照时间先后顺序将数据帧x划分成为n段;
17、步骤32:根据索引号i标记的起始位置i,计算出n段数据帧的分段均值,并记录每一段数据帧对应的分段号n;
18、步骤33:将分段号n作为ram端口a的写地址,将分段均值作为ram端口a的写数据,根据时间顺序将分段均值存储至ram中;
19、步骤34:利用冒泡法将分段均值按照升序排列,得到四个最小的分段均值的下标m0、m1、m2、m3;
20、步骤35:将数据帧x和索引号i同时延迟k点,得到数据帧a1和索引号b1并与当前分段的分段均值时序对齐;
21、步骤36:根据索引号b1对应的下标位置i,计算出分段方差,并计算出最小的分段方差的索引n0;
22、步骤37:将最小的分段方差的索引n0作为ram的读取地址,计算出恒虚警阈值。
23、为了更好地实现本发明,进一步地,所述步骤4的具体操作为:将恒虚警阈值作为噪底z,引入噪声因子α,得到最终的恒虚警门限vt。
24、为了更好地实现本发明,进一步地,所述步骤5的具体操作为:将数据帧a1和索引号b1同时延迟nk个时钟,得到最终数据帧a2和索引号b2,然后将数据帧a2与恒虚警门限值vt的时序对齐,最后将恒虚警门限vt与数据帧a2输入至比较器中,输出大于恒虚警门限值的频点对应的索引号和数据帧。
25、本发明具有以下有益效果:
26、(1)本发明通过将采集的无人机数字信号进行75%时间重叠fft频谱累加处理,提高了信号本身的灵敏度和时间分辨率,由于信号进了多次积累,避免了环境中gps导航、手机通信信号、wifi信号等非均匀杂波带来的噪声方差波动较大的问题。
27、(2)本发明在累加处理的基础上采用分段均值求取恒虚景阈值的算法进行数字信号处理,快速检测出无人机噪底门限,具有计算容易、方便实现、目标检测概率较高的特点。
28、(3)本发明在获取动态阈值时,将75%时间重叠的fft频谱信号通过分段均值进行排序检测提高了噪声门限获取准确性和信号检测的灵敏度,实现了更远距离的目标检测。
29、(4)本发明实现的恒虚警算法基于并行架构,采用流水线设计在fpga易于实现,资源占用较少。
技术特征:
1.一种基于fft累加的分段均值恒虚警检测方法,其特征在于,将采集的无人机数字信号进行75%时间重叠fft频谱累加处理,然后采用分段均值恒虚警算法进行动态门限检测,计算出恒虚景门限vt,比较当前频点的数据帧与恒虚景门限vt的大小,输出大于恒虚景门限vt的频点的索引号和数据帧。
2.如权利要求1所述的一种基于fft累加的分段均值恒虚警检测方法,其特征在于,所述方法具体包括以下步骤:
3.如权利要求2所述的一种基于fft累加的分段均值恒虚警检测方法,其特征在于,所述步骤1具体包括以下步骤:
4.如权利要求3所述的一种基于fft累加的分段均值恒虚警检测方法,其特征在于,所述步骤2的具体操作为:将四路fft无人机数字信号时序对齐并进行求模运算,根据索引号对应的频点的位置,将四路fft无人机数字信号的数据帧进行累加求和,得到累加后的fft无人机数字信号的数据帧x和索引号i。
5.如权利要求4所述的一种基于fft累加的分段均值恒虚警检测方法,其特征在于,所述步骤3具体包括以下步骤:
6.如权利要求5所述的一种基于fft累加的分段均值恒虚警检测方法,其特征在于,所述步骤4的具体操作为:将恒虚警阈值作为噪底z,引入噪声因子α,得到最终的恒虚警门限vt。
7.如权利要求6所述的一种基于fft累加的分段均值恒虚警检测方法,其特征在于,所述步骤5的具体操作为:将数据帧a1和索引号b1同时延迟nk个时钟,得到最终数据帧a2和索引号b2,然后将数据帧a2与恒虚警门限值vt的时序对齐,最后将恒虚警门限vt与数据帧a2输入至比较器中,输出大于恒虚警门限值的频点对应的索引号和数据帧。
技术总结
本发明涉及无人机侦测技术领域,具体地说,涉及一种基于FFT累加的分段均值恒虚警检测方法;首先通过将采集的无人机数字信号进行75%时间重叠FFT频谱累加处理,然后采用分段均值恒虚警算法进行动态门限检测,计算出恒虚景门限V<subgt;T</subgt;,比较当前频点的数据帧与恒虚景门限V<subgt;T</subgt;的大小,输出大于恒虚景门限V<subgt;T</subgt;的频点的索引号和数据帧,提高了噪声门限获取的准确性和信号检测的灵敏度,避免了环境中GPS导航、手机通信信号、wifi信号等非均匀杂波带来的噪声方差波动较大的问题,实现了更远距离的目标检测。
技术研发人员:沈春鹏,马亮,邓小松,陈祈星
受保护的技术使用者:成都能通科技股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!