基于卡尔曼滤波的空间自旋群目标三维成像方法
本发明属于雷达,涉及空间自旋群目标三维成像方法。
背景技术:
1、弹道导弹凭借着体积大,射程远,威力大等特点成为战争中攻击敌方目标的利器,为了保证运动的定向性,导弹自身进行着较大转速的自旋运动;同时为了达到突防的目的,导弹采用了一定的突防技术,并释放碎片,诱饵等,他们与导弹目标共同构成了自旋群目标,并且他们的运动速度,转速等运动状态各不相同。由于旋转群目标的机动性更加多变,实现此类目标高分辨成像的难度较于单个目标有所增大,而在群目标中准确识别出弹头对于导弹拦截也具有重要意义。目前,解决空间自旋群目标的三维成像方法主要基于匹配搜索法以及粒子群优化算法,前者具有搜索计算量大,运算时间长的弊端,后者搜索结果的准确性受到搜索范围以及搜索参数设置的影响,并且容易陷入局部最优值的问题。因此,减少搜索计算量,提高参数估计的准确性对于空间自旋群目标的三维成像来说是十分有必要的。
技术实现思路
1、本发明的目的是为了解决现有空间自旋群目标三维成像方法中搜索计算量大,运算时间长,参数估计准确性受到搜索范围以及搜索参数设置的限制等问题,而提出基于卡尔曼滤波的空间自旋群目标三维成像方法。
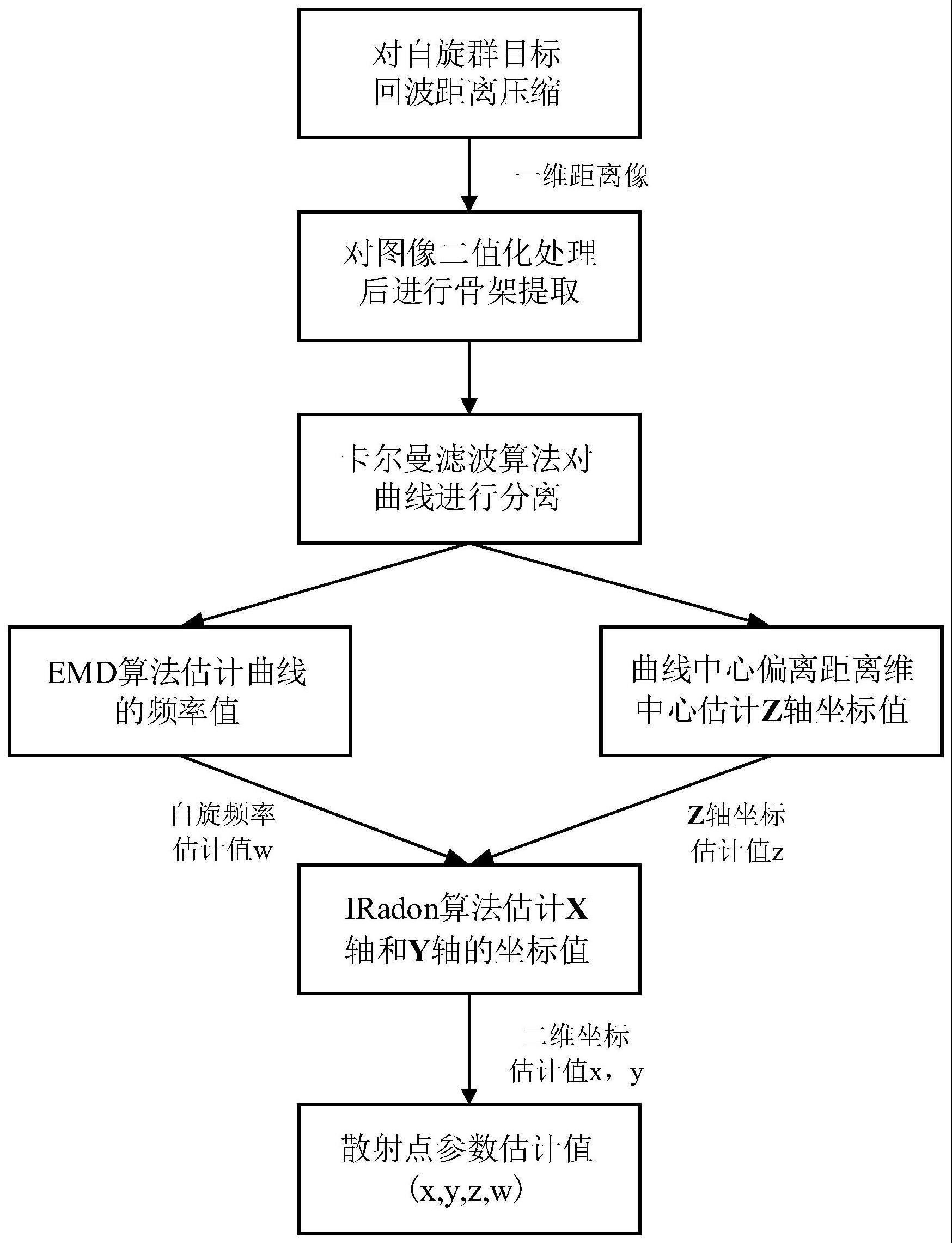
2、基于卡尔曼滤波的空间自旋群目标三维成像方法具体过程为:
3、步骤一、对空间自旋群目标的回波信号依次进行距离维压缩和运动补偿处理,获得补偿后的一维距离像sr(r,tm);
4、其中,r为距离维,tm为脉冲信号发射时间,即慢时间;
5、步骤二、设置合适的阈值对一维距离像sr(r,tm)进行二值化处理,对二值化后图像进行骨架提取处理,获得图像sr(m,n);
6、其中,(m,n)为图像sr(m,n)的位置坐标;m=1,2,…m,n=1,2,…n,m为单次脉冲的采样点数,n为脉冲积累数;
7、步骤三、根据图像sr(m,n)判断正弦曲线条数为n1,使用卡尔曼滤波算法对图像sr(m,n)中各条正弦曲线进行提取;
8、步骤四、使用emd算法对提取得到的各条正弦曲线进行频率分析,获得各条正弦曲线对应散射点的自旋频率估计值,并将具有相同自旋频率的散射点划分为同一子目标;
9、步骤五、根据各条正弦曲线中心偏离距离维中心的值对相应散射点的z轴方向坐标值进行估计;
10、步骤六、基于步骤四和步骤五,使用iradon变换对散射点的x轴和y轴方向坐标值进行估计。
11、本发明的有益效果为:
12、本发明中提出了一种基于卡尔曼滤波的空间自旋群目标三维成像方法,该方法通过将一维距离像中的各条正弦曲线分离,可以直接对目标的自旋频率以及z轴坐标值进行估计,将传统匹配搜索法对参数的四维搜索转化为二维搜索,减少了计算量,缩短了运算时间;相较于基于粒子群优化算法的参数搜索,此方法搜索结果的准确性不会受到搜索范围设置的限制以及陷入局部最优值;除此之外,对一维距离像中各条曲线的分离也便于对目标进行区分,便于后续对各目标进行单独分析。
技术特征:
1.基于卡尔曼滤波的空间自旋群目标三维成像方法,其特征在于:所述方法具体过程为:
2.根据权利要求1所述的基于卡尔曼滤波的空间自旋群目标三维成像方法,其特征在于:所述步骤一中空间自旋群目标各散射点的瞬时斜距表达式为δrp(tm)=x'psin(ωtm)+y'pcos(ωtm)+z'p,每个散射点各时刻的瞬时斜距构成一条正弦曲线;
3.根据权利要求2所述的基于卡尔曼滤波的空间自旋群目标三维成像方法,其特征在于:所述步骤一中的一维距离像sr(r,tm)包含幅值、周期以及初始相位不同的正弦曲线,sr(r,tm)为一个m×n的二维矩阵。
4.根据权利要求3所述的基于卡尔曼滤波的空间自旋群目标三维成像方法,其特征在于:所述步骤二中设置合适的阈值对一维距离像sr(r,tm)进行二值化处理,对二值化后图像进行骨架提取处理,获得图像sr(m,n);具体过程为:
5.根据权利要求4所述的基于卡尔曼滤波的空间自旋群目标三维成像方法,其特征在于:所述步骤三中根据图像sr(m,n)判断正弦曲线条数为n1,使用卡尔曼滤波算法对图像sr(m,n)中各条正弦曲线进行提取;具体过程为:
6.根据权利要求5所述的基于卡尔曼滤波的空间自旋群目标三维成像方法,其特征在于:所述步骤四中使用emd算法对提取得到的各条正弦曲线进行频率分析,获得各条正弦曲线对应散射点的自旋频率估计值,并将具有相同自旋频率的散射点划分为同一子目标;具体过程为:
7.根据权利要求6所述的基于卡尔曼滤波的空间自旋群目标三维成像方法,其特征在于:所述步骤五中根据各条正弦曲线中心偏离距离维中心的值对相应散射点的z轴方向坐标值进行估计;具体过程为:
8.根据权利要求7所述的基于卡尔曼滤波的空间自旋群目标三维成像方法,其特征在于:所述步骤六中基于步骤四和步骤五,使用iradon变换对散射点的x轴和y轴方向坐标值进行估计;具体过程为:
技术总结
基于卡尔曼滤波的空间自旋群目标三维成像方法,本发明涉及空间自旋群目标三维成像方法。本发明的目的是为了解决现有空间自旋群目标三维成像方法中搜索计算量大,运算时间长,参数估计准确性受到搜索范围以及搜索参数设置的限制等问题。过程为:一、基于空间自旋群目标获得一维距离像;二、对一维距离像进行二值化处理,对二值化后图像进行骨架提取处理获得图像;三、对图像中各条正弦曲线进行提取;四、获得各条正弦曲线对应散射点的自旋频率估计值;五、根据各条正弦曲线中心偏离距离维中心的值对相应散射点的z轴方向坐标值进行估计;六、使用IRadon变换对散射点的x轴和y轴方向坐标值进行估计。本发明属于雷达技术领域。
技术研发人员:王勇,杨竣婷
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!