物体检测装置以及物体检测方法与流程
本发明涉及物体检测装置以及物体检测方法。
背景技术:
1、以往,存在向物体发送超声波等探测波,接收被物体反射的探测波,进行各种运算,由此计算物体的位置等的技术。
2、具体而言,例如使用由沿水平方向以规定距离分离地配置的两个传感器进行的探测波的收发结果并基于三边测量法来计算两点坐标,根据该两点间距离来判定物体的位置、形状(壁状、柱状等)。
3、专利文献1:日本特开2020-67431号公报
4、然而,在上述现有技术中,判定结果的精度因物体的位置而不同,存在改善的余地。
技术实现思路
1、因此,本发明的课题之一是提供一种能够提高与物体检测有关的判定结果的精度的物体检测装置以及物体检测方法。
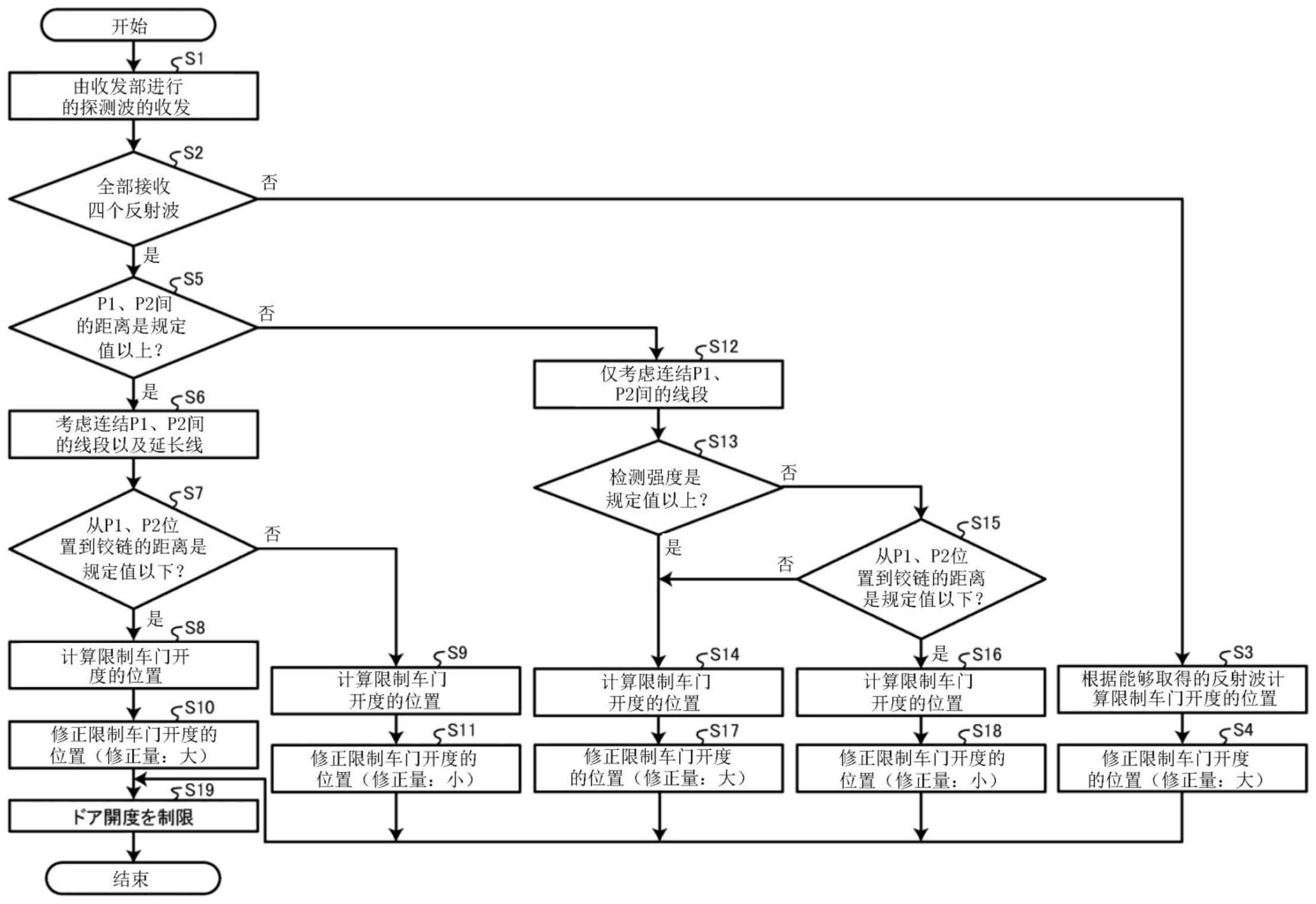
2、本发明的实施方式的物体检测装置例如具备:第一收发部和第二收发部,其沿水平方向分离规定距离而配置,发送探测波并且接收由物体反射的上述探测波;以及处理部,其基于上述第一收发部的接收结果以及上述第二收发部的接收结果,来计算物体的位置。上述处理部具备:距离处理部,其在上述第一收发部发送了探测波的情况下,基于上述第一收发部的接收结果和上述第二收发部的接收结果来计算第一点,在上述第二收发部发送了探测波的情况下,基于上述第一收发部的接收结果和上述第二收发部的接收结果来计算第二点,并计算上述第一点与上述第二点的分离距离;位置计算部,其基于上述第一点和上述第二点来计算上述物体的位置;以及位置修正部,其为了修正在计算上述物体的位置时产生的误差,用与计算出的上述物体的位置对应的修正量来修正上述物体的位置。
3、根据该结构,通过根据物体的检测位置来调整物体的位置的修正量,能够提高与物体检测有关的判定结果的精度。
4、另外,在上述物体检测装置中,例如计算出的上述物体的位置越接近上述第一收发部以及上述第二收发部的位置,上述位置修正部将上述修正量设定得越大。
5、根据该结构,能够进行与从传感器(第一收发部、上述第二收发部)到物体的距离越远则检测误差越小这样的检测特性对应的适当的修正。
6、另外,在上述物体检测装置中,例如上述第一收发部设置于通过以铰链为轴转动而开闭的车门的上述铰链侧以及开闭端侧中的任一侧,上述第二收发部设置于上述车门的上述铰链侧以及上述开闭端侧中的另一侧,计算出的上述物体的位置越接近上述铰链的位置,上述位置修正部将上述修正量设定得越大。
7、根据该结构,将物体的检测位置用于之后的车门开度控制的情况下的安全性进一步得以提高。
8、另外,在上述物体检测装置中,例如上述处理部还具备:根据上述分离距离来判定上述物体是壁状还是柱状的形状判定部、以及计算表示上述第一收发部和上述第二收发部接收到的上述探测波的强度的反射强度的反射强度处理部。上述位置修正部,在由上述形状判定部判定为上述物体是柱状,并且上述反射强度处理部计算出的反射强度超过规定的反射强度阈值的情况下,将上述修正量设定得比上述反射强度没有超过上述规定的反射强度阈值的情况大。
9、根据该结构,根据即使在判定为物体是柱状的情况下,考虑在反射强度超过规定的反射强度阈值的情况下也存在物体是壁状的可能性的情况来增大修正量,从而将物体的检测位置用于之后的车门开度控制的情况下的安全性进一步得以提高。
10、另外,在上述物体检测装置中,例如在由上述第一收发部以及上述第二收发部发送出的探测波的至少一个未被上述第一收发部或者上述第二收发部接收到的情况下,上述位置修正部将上述修正量设定得比全部接收到的情况大。
11、根据该结构,若四个反射波中的至少一个也不能被接收,则能够进行与物体不是简单的形状这样的可能性对应的适当的修正。
12、另外,在上述物体检测装置中,例如上述处理部还具备碰撞判定部,该碰撞判定部判定在由上述车门的全闭位置、上述车门的全开位置以及上述车门开闭时的轨迹围起的区域内是否存在上述物体,在上述物体存在于上述区域内的情况下,计算上述物体与上述车门的碰撞位置。
13、根据该结构,能够将物体与车门的碰撞位置用于之后的各种处理。
14、另外,在上述物体检测装置中,例如上述车门设置于车辆,上述处理部还具备车门开度控制部,该车门开度控制部基于由上述碰撞判定部计算出的上述碰撞位置来限制上述车门的开度。
15、根据该结构,能够基于高精度的碰撞位置来适当地限制车门的开度。
16、另外,实施方式的物体检测方法例如是由具备沿水平方向分离规定距离而配置,发送探测波并且接收由物体反射的上述探测波的第一收发部以及第二收发部的物体检测装置进行的物体检测方法。其包含以下步骤:距离处理步骤,在上述第一收发部发送了探测波的情况下,基于上述第一收发部的接收结果和上述第二收发部的接收结果来计算第一点,在上述第二收发部发送了探测波的情况下,基于上述第一收发部的接收结果和上述第二收发部的接收结果来计算第二点,并计算上述第一点与上述第二点的分离距离;位置计算步骤,基于上述第一点和上述第二点来计算上述物体的位置;以及位置修正步骤,为了修正在计算上述物体的位置时产生的误差,用与计算出的上述物体的位置对应的修正量来修正上述物体的位置。
17、根据该结构,根据物体的检测位置来调整物体的位置的修正量,从而能够提高与物体检测有关的判定结果的精度。
技术特征:
1.一种物体检测装置,其特征在于,具备:
2.根据权利要求1所述的物体检测装置,其特征在于,
3.根据权利要求1或2所述的物体检测装置,其特征在于,
4.根据权利要求1~3中任一项所述的物体检测装置,其特征在于,
5.根据权利要求1~4中任一项所述的物体检测装置,其特征在于,
6.根据权利要求3所述的物体检测装置,其特征在于,
7.根据权利要求6所述的物体检测装置,其特征在于,
8.一种物体检测方法,是由具备沿水平方向分离规定距离而配置,发送探测波并且接收由物体反射的上述探测波的第一收发部以及第二收发部的物体检测装置进行的物体检测方法,其特征在于,包含以下步骤:
技术总结
本发明涉及物体检测装置以及物体检测方法,提高与物体检测有关的判定结果的精度。该装置具备沿水平方向分离规定距离配置发送探测波并接收由物体反射的探测波的第一和第二收发部;基于它们的接收结果计算物体的位置的处理部。处理部具备在第一收发部发送了探测波时基于第一和第二收发部的接收结果计算第一点,在第二收发部发送了探测波的情况下基于第一和第二收发部的接收结果计算第二点并计算第一点与第二点的分离距离的距离处理部;基于第一点和第二点来计算物体的位置的位置计算部;及为了修正在计算上述物体的位置时产生的误差,用与计算出的上述物体的位置对应的修正量来修正上述物体的位置的位置修正部。
技术研发人员:塚尾公祐
受保护的技术使用者:株式会社爱信
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!