一种用于侧扫雷达的有效测速单元判定方法与流程
本发明属于测量,涉及水文测量技术,具体涉及一种用于侧扫雷达的有效测速单元判定方法。
背景技术:
1、侧扫雷达是进行大江大河、跨界河流等河流表面流速测量的水文雷达,采用非接触式雷达技术,实现对河流表面流场、网格点流速进行连续监测,同时提供数据上传服务;系统通过水位、过流面积、表面流速等数据交互,完成流量数据网络合成,实现全天候、连续自动河流流量监测。在水文测流行业中,近年来侧扫雷达测流技术应用越来越广泛。相对于必须安装在水流正上方的传统点雷达,侧扫雷达可采集水流表面多个单元的流速,但实际使用中我们却发现其监测结果误差较大,输出结果精确度较低。究其原因,我们认为并不是所有侧扫雷达采集的单元的流速样本均可参与最终的流量计算,但究竟其中哪些是对精确计算有正面效果,哪些是应被剔除的,现有技术中并没有精确的判定方法。
技术实现思路
1、针对现有技术中存在的问题,本发明公开了一种用于侧扫雷达的有效测速单元判定方法,有机结合了动态测速单元、水面信号强度、实时流速等多个因子,形成一套有效的测速单元有效性的判定方法,剔除了干扰单元,保留对精确计算有正面效果的流速样本。
2、为达到上述目的,本发明的技术方案如下:
3、一种用于侧扫雷达的有效测速单元判定方法,包括如下步骤:
4、步骤1,获取流速单元数据
5、侧扫雷达设备通过测量计算,生成若干沿测流断面方向的动态数量的扇形水面流速单元;
6、步骤2,通过各流速单元的位置指数,判定动态流速单元有效性;
7、步骤3,通过水面信号质量,判定动态流速单元有效性;
8、步骤4,获取各流速单元的流速偏离指数,判定实时流速有效性;
9、步骤5,结合步骤2-4中得到的多个因子判断侧扫雷达单元流速有效性。
10、进一步的,所述步骤2包括如下子步骤:
11、(1)收集河道监测站的安装信息;
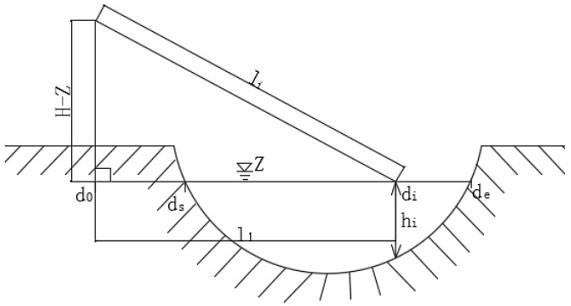
12、(2)根据测站安装信息,构建测站三维空间模型如下:
13、 (1)
14、式中,为流速单元起点距,为雷达安装起点距,为雷达安装高程,为实时水位值,为雷达发射天线至表面流速单元位置的直线距离;
15、(3)为三维空间模型接入实时水位,计算第i个流速单元的位置指数:
16、 (2)
17、式中,为测流断面近雷达边界处起点距,为测流断面远雷达边界处起点距,由水位和测流断面的大断面资料可求得;为直线的水面投影,为流速单元近雷达边界与测流断面之间的垂直距离;为第i个流速单元处水深,为雷达测速所需的最小水深。
18、进一步的,的计算方法如下:
19、。
20、进一步的,所述步骤2中的安装信息至少包括:雷达安装起点距、雷达安装高程、大断面信息。
21、进一步的,所述步骤3包括如下子步骤:
22、(1)根据侧扫雷达的测速单元布设信息,在侧扫雷达工作的断面采用历史资料或比测仪器多次测量流速信息;
23、(2)采集侧扫雷达相应单元格的信号质量信息;
24、(3)将同一时刻同一起点距单元格流速与侧扫雷达单元流速对比,分析出能准确反映流场状态的。
25、进一步的,所述步骤3中,通过侧扫雷达设备采集处理海量信号得出,其具体值由雷达设备在一次测量完成后发出。
26、进一步的,所述步骤4包括如下子步骤:
27、(1)根据侧扫雷达的测速单元布设信息,在侧扫雷达工作的断面采用采用历史资料或流速比测仪器多次测量流速,率定出第i个流速单元处的水位-水面流速关系;
28、(2)将同一时刻同一起点距流速比测仪器得出的流速与侧扫雷达单元流速对比,分析侧扫雷达自然工况中的测速有效性;
29、(3)根据率定出的第i个流速单元处的水位-水面流速关系,计算当前水位第i个流速单元的流速值偏离指数:
30、 (4)
31、式中,为当前水位第i个流速单元的流速值,为侧扫雷达设备所能测到的最大流速,为侧扫雷达设备所能测到的最小流速,为由断面测流资料率定出的第i个流速单元处的水位-水面流速关系。
32、进一步的,所述步骤4中,若测量断面无率定成果,将直接取值。
33、进一步的,所述步骤5包括如下过程:
34、通过下列公式计算每个单元的流速值有效性:
35、 (5)
36、式中,为第i个流速单元的有效性指数,取值范围0-1;为第i个流速单元的位置指数,取值0或1;为第i个流速单元的信号可信度指数,取值范围0-1;为第i个流速单元的流速值偏离指数。
37、本发明的有益效果为:
38、本发明通过对测速单元进行多方面判定,量化其有效性,从而能够去除侧扫雷达干扰单元数据,提高了用于最终计算的流速样本准确性,使得侧扫雷达系统流量计算精度大大提高。
技术特征:
1.一种用于侧扫雷达的有效测速单元判定方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的用于侧扫雷达的有效测速单元判定方法,其特征在于,所述步骤2包括如下子步骤:
3.根据权利要求2所述的用于侧扫雷达的有效测速单元判定方法,其特征在于,的计算方法如下:
4.根据权利要求2所述的用于侧扫雷达的有效测速单元判定方法,其特征在于,所述步骤2中的安装信息至少包括:雷达安装起点距、雷达安装高程、大断面信息。
5.根据权利要求1所述的用于侧扫雷达的有效测速单元判定方法,其特征在于,所述步骤3包括如下子步骤:
6.根据权利要求5所述的用于侧扫雷达的有效测速单元判定方法,其特征在于,所述步骤3中,通过侧扫雷达设备采集处理海量信号得出,其具体值由雷达设备在一次测量完成后发出。
7.根据权利要求1所述的用于侧扫雷达的有效测速单元判定方法,其特征在于,所述步骤4包括如下子步骤:
8.根据权利要求6所述的用于侧扫雷达的有效测速单元判定方法,其特征在于,所述步骤4中,若测量断面无率定成果,将直接取值。
9.根据权利要求1所述的用于侧扫雷达的有效测速单元判定方法,其特征在于,所述步骤5包括如下过程:
技术总结
本发明公开了一种用于侧扫雷达的有效测速单元判定方法,包括:获取流速单元数据;判断动态流速单元有效性,得到各流速单元的位置指数;判定水面信号质量,获取信号强度对于测流准确度的影响程度;实时判定各单元流速有效性,获取对应的流速偏离指数;结合得到的多个因子判断侧扫雷达单元流速有效性。本发明通过对测速单元进行多方面判定,量化其有效性,从而能够去除侧扫雷达干扰单元数据,提高了用于最终计算的流速样本准确性,使得侧扫雷达系统流量计算精度大大提高。
技术研发人员:牛智星,嵇海祥,王少华,胡道科,杨海梅,崔彦萍,周安辉,尼玛扎西,程祥吉,高鹏,曹晓鹏,张勇,黄敏,韩宝豆,陈翠,陈宇飞,胡春杰
受保护的技术使用者:水利部南京水利水文自动化研究所
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!