一种基于GNSS/SINS/DVL组合的洋流速度最优估计方法
本发明属于导航,特别涉及一种基于gnss/sins/dvl组合的洋流速度最优估计方法。
背景技术:
1、在现有的导航发展过程中,在陆地以及空中,gnss与ins可以很好的提供位置和速度等初始信息,但是在水下,gnss信号无法穿透水层给在水中的载体提供辅助信息,更多的是利用多普勒测速仪(dvl),其利用声学测速原理,能提供载体稳定的相对速度信息。但是,在一定条件下,dvl无法准确的测得载体的相对速度信息,而获得的是相对水流层的速度,这时洋流速度就无法被忽略。
2、在某些领域中,洋流速度信息对一些设备的运用效果有着极为重要的影响,洋流对气候发生虽然并非直接的,却有着巨大的影响,许多沿海地区的温度和降水状况都与附近的洋流有关。人类对于洋流的利用还体现在航运上,其对经济发展也起着至关重要的作用,因此对洋流速度的估算有着极为重要的意义。
3、申请号为cn202111543405.6(基于sins与gnss组合及dvl的洋流速度估计方法)的专利中提出了在基于gnss/sins/dvl组合条件下,使用卡尔曼滤波(kf)的方法估计出洋流速度,该方法需要预先知道误差协方差阵且需要良好的参数初始值,其过程不可避免的存在参数调整过程,具有一定的局限性。针对这些问题,本发明提出采用基于矩阵分解技术和q-method的优化对准(oba)方法估计洋流速度,在同样的组合条件下,利用数学方法,即最优化估计原理,将求最优问题转化为多元函数求极值问题。构造目标函数,并求偏导,当两次状态更新小于设定的值,或达到迭代计算的次数,就可以求解出此刻最优的洋流速度。
技术实现思路
1、为了解决以上问题,本申请提出一种基于gnss/sins/dvl组合的洋流速度最优估计方法,有效的克服了传统算法依赖初始参数、要提前预知仪表先验信息的缺点,提高了的导航的定位精度。
2、为实现上述目的,本发明采取的技术方案是:
3、本发明提供一种基于gnss/sins/dvl组合的洋流速度最优估计方法,包括:
4、(1)构建包含洋流速度在内的gnss/sins/dvl组合导航运动模型;
5、步骤(1)中所述的包含洋流速度在内的gnss/sins/dvl组合导航运动模型;为:
6、
7、式中具体参数含义如下:表示在b系下从t时刻到0时刻的姿态矩阵,表示在n系下从t时刻到0时刻的姿态矩阵,是dvl输出速度在b系下的投影,表示洋流速度。只有未知,所有其他分量一部分可以直接从仪器的输出中获得,如另一部分可以由仪表输出计算出来,如和经过积分移项,整理得:
8、
9、其中对符号的定义为:
10、进一步等间隔选取数据,简写为:
11、
12、通过四元数与姿态矩阵的变换关系,然后利用四元数的乘法运算性质,得到:
13、
14、(2)设计了洋流速度参数寻优目标函数;
15、步骤(2)中所述的构建的洋流速度参数寻优目标函数为
16、
17、式中参数如下,理论上当q与取真值时γ=04×1,同时l趋近于0,此时q与的求解问题可转化为参数寻优问题;
18、(3)设计了基于gnss/sins/dvl组合的洋流速度最优化估计算法;
19、步骤(3)中所述的gnss/sins/dvl组合的洋流速度最优化估计算法是指将参数求解问题化为多元函数求极值的问题去求解步骤(2)中的参数寻优问题。
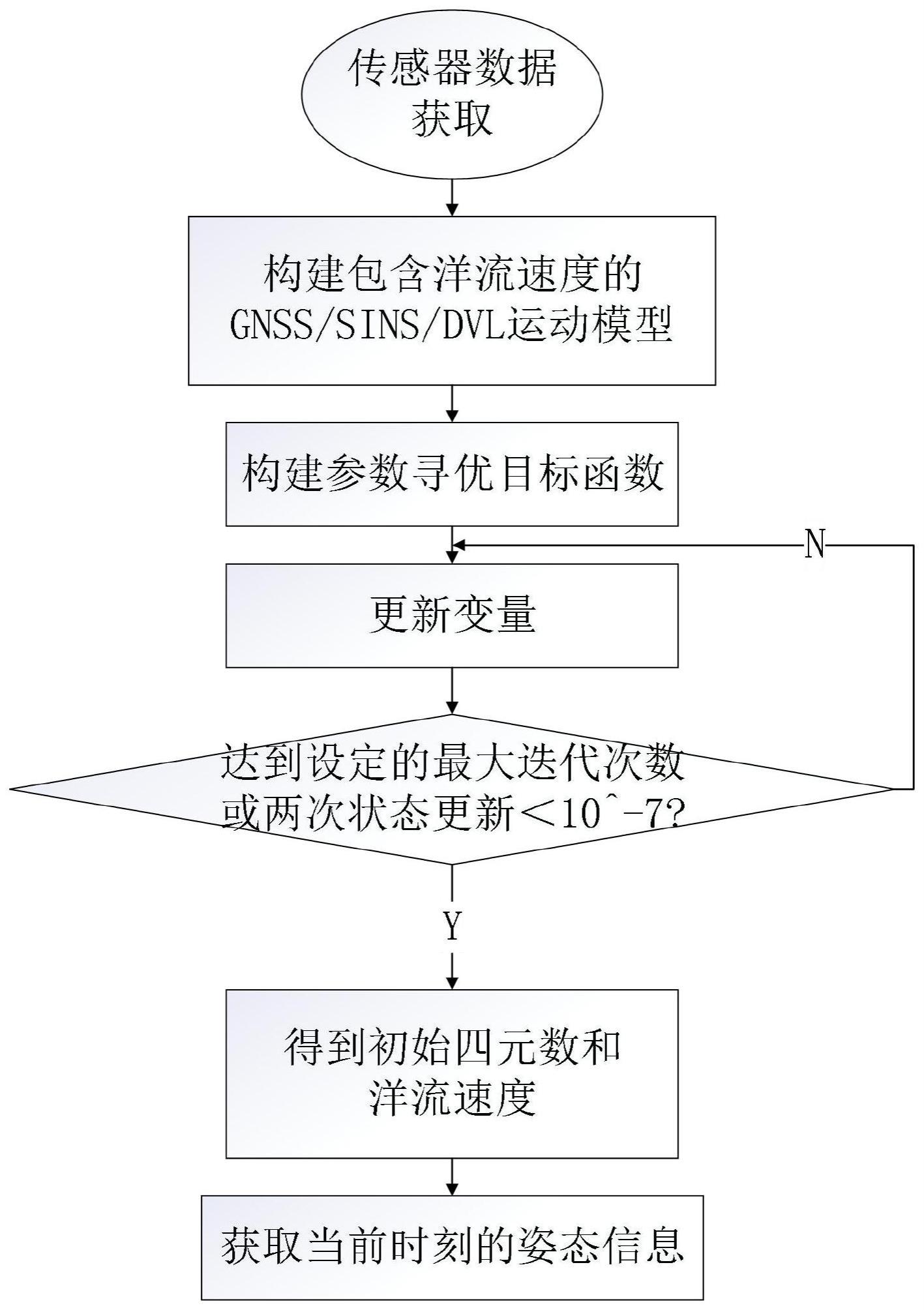
20、作为本发明进一步改进,步骤(3)中所述的基于gnss/sins/dvl组合的洋流速度最优化估计算法具体流程为:
21、对于当前时间tm:
22、第一步:计算出αm,βm和γm值,然后根据和使用它们tm-τ时刻值来计算α,β和γ;
23、第二步:设置k=0,并从一个较好的估计值(xk,uk)开始;
24、第三步:计算一阶和二阶偏导数
25、第四步:求解增量(δx,δu);
26、第五步:更新(xk,uk);
27、第六步:设置k=k+1,转到第四步,直到达到收敛精度或达到最大迭代次数;
28、第七步:得到了初始姿态四元数q和洋流速度
29、第八步:利用初始姿态矩阵,计算当前时刻的姿态矩阵。
30、有益效果:本方法基于gnss/sins/dvl组合的洋流速度最优估计的方法,通过对包含洋流速度在内的组合导航运动模型进行重构,结合oba算法估计出载体姿态及洋流速度。本发明的优点是对准效果良好,姿态误差角更加靠近零值且波动性更小,同时对初始值要求不高的优点,更具有鲁棒性,且估计精度与kf算法相当。
技术特征:
1.一种基于gnss/sins/dvl组合的洋流速度最优估计方法,其特征在于,包括:
2.根据权利要求1所述的一种基于gnss/sins/dvl组合的洋流速度最优化估计方法,其特征在于:步骤(3)中所述的基于gnss/sins/dvl组合的洋流速度最优化估计算法具体流程为:
技术总结
一种基于GNSS/SINS/DVL组合的洋流速度最优估计方法,方法包括以下步骤:(1)构建包含洋流速度在内的GNSS/SINS/DVL组合导航运动模型;(2)设计洋流速度参数寻优目标函数;(3)设计基于GNSS/SINS/DVL组合的洋流速度最优化估计算法。本发明提供一种基于最优化理论依靠GNSS/SINS/DVL输出数据来估计水平洋流速度的方法,有效的克服了传统卡尔曼滤波算法依赖初始参数、要提前预知仪表先验信息的缺点,提高了估计的效率和准确度。
技术研发人员:刘锡祥,江美娟,黄永江,赵炳权,陈瑾杰
受保护的技术使用者:东南大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!