具有在线攻击检测功能的室内移动机器人定位方法及系统
本发明属于智能控制,具体涉及一种具有在线攻击检测功能的室内移动机器人定位方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、移动机器人技术涉及到计算机、传感器、人机交互、仿生学等多个学科,其中环境感知、自主定位和运动控制是移动机器人技术的三大重点问题。移动机器人的自主定位是完成其他高级任务的前提,移动机器人的自主定位大致可以分为相对定位和绝对定位。相对定位是利用内部传感器通过测量单位时间内机器人位姿变化,逐步推算出机器人相对于起始状态的位姿,从而完成移动机器人的定位过程。绝对定位又称为全局定位,完成机器人全局定位需要预先确定好环境模型或通过传感器直接向机器人提供外接位置信息,计算机器人在全局坐标系中的位置。绝对定位成本较高且gps无法完成室内环境的精准定位,而相对定位能满足大多数实际应用场景且成本较低,故本发明采用相对定位方式。
3、由于单纯编码器数据定位不够准确,利用卡尔曼滤波器融合编码器和陀螺仪数据,实现移动机器人的定位。然而,在实际应用中传感器不可避免地会遭受网络攻击,一旦传感器遭受攻击会破坏测量数据的完整性、可用性和可信性,导致移动机器人定位出错,极易产生不可估量的后果。如果能够及时检测到攻击,并设计相应的抵御攻击的方法,就可以降低移动机器人的定位错误率,确保系统的稳定运行,提高系统的鲁棒性。因此,研究遭受攻击下的室内移动机器人定位具有重要的实际意义和理论意义。然而现有技术中,传统卡方检测无法精确检测出攻击者精心设计的虚假注入攻击。
技术实现思路
1、为了解决上述问题,本发明提出了一种具有在线攻击检测功能的室内移动机器人定位方法及系统,本发明可以及时检测到室内移动机器人定位过程中是否遭受攻击,有效地抑制了外部干扰的影响,确保移动机器人定位的准确性。
2、根据一些实施例,本发明的第一方案提供了一种具有在线攻击检测功能的室内移动机器人定位方法,采用如下技术方案:
3、具有在线攻击检测功能的室内移动机器人定位方法,包括:
4、根据移动机器人运动学模型,建立移动机器人离散的状态空间表达式,得到移动机器人相对位姿递推公式;
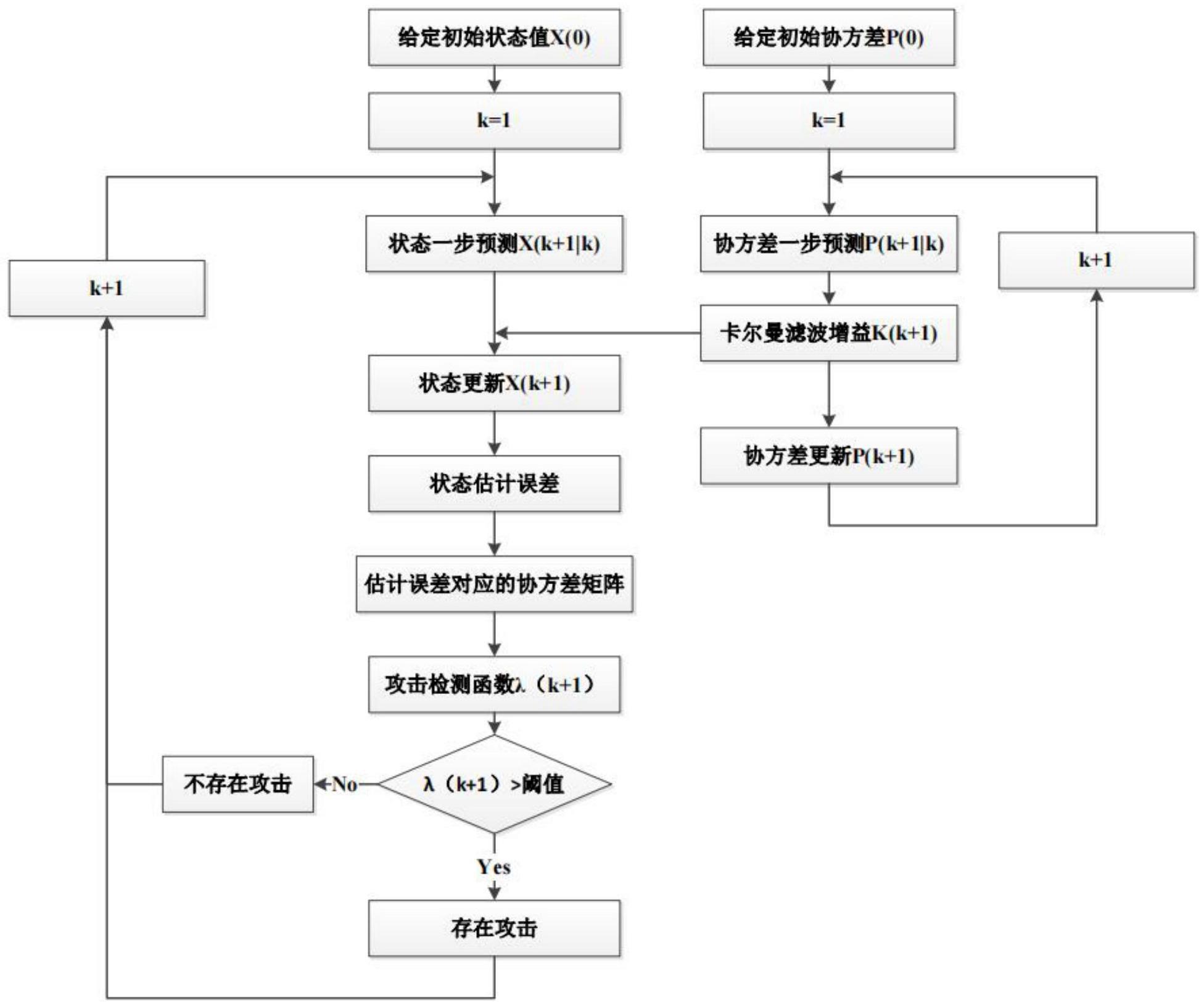
5、获取移动机器人的位置信号,在所述移动机器人离散的状态空间表达式中,利用卡尔曼滤波算法估计移动机器人的最优位姿,实现移动机器人的相对定位;
6、基于移动机器人的最优位姿估计值与位姿实际值进行比较,计算出两者的残差,使用卡方检测检测残差是否异常,实现移动机器人定位的在线攻击检测。
7、根据一些实施例,本发明的第二方案提供了一种具有在线攻击检测功能的室内移动机器人定位系统,采用如下技术方案:
8、具有在线攻击检测功能的室内移动机器人定位系统,包括:
9、移动机器人状态空间表达确定模块,被配置为根据移动机器人运动学模型,建立移动机器人离散的状态空间表达式,得到移动机器人相对位姿递推公式;
10、移动机器人定位模块,被配置为获取移动机器人的位置信号,在所述移动机器人离散的状态空间表达式中,利用卡尔曼滤波算法估计移动机器人的最优位姿,实现移动机器人的相对定位;
11、移动机器人定位在线攻击检测模块,被配置为基于移动机器人的最优位姿估计值与位姿实际值进行比较,计算出两者的残差,使用卡方检测检测残差是否异常,实现移动机器人定位的在线攻击检测。
12、根据一些实施例,本发明的第三方案提供了一种计算机可读存储介质。
13、一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上述第一个方面所述的具有在线攻击检测功能的室内移动机器人定位方法中的步骤。
14、根据一些实施例,本发明的第四方案提供了一种计算机设备。
15、一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述第一个方面所述的具有在线攻击检测功能的室内移动机器人定位方法中的步骤。
16、与现有技术相比,本发明的有益效果为:
17、本发明公开了一种具有在线攻击检测功能的室内移动机器人定位方法,在室内移动机器人定位过程中利用卡尔曼滤波器将编码器和陀螺仪数据进行融合,解决了单纯依靠编码器数据进行定位不准问题,保证了室内移动机器人的定位。
18、本发明引入了一种能够估计无攻击时状态变量的估计器,能够更好跟踪上移动机器人的运动状态。此外,当移动机器人受到攻击者攻击时,设计的在线卡方检测能够及时检测到攻击的存在与否,以便系统能够及时调整移动机器人的移动路径,降低网络攻击对系统的不利影响。
19、本发明提高了系统的鲁棒性和安全性,能够确保移动机器人系统在干扰环境下稳定运行,实现在线实时检测被攻击的异常数据,显著提高了室内移动机器人定位的准确性。
技术特征:
1.具有在线攻击检测功能的室内移动机器人定位方法,其特征在于,包括:
2.如权利要求1所述的具有在线攻击检测功能的室内移动机器人定位方法,其特征在于,所述移动机器人离散的状态空间表达式,具体为:
3.如权利要求1所述的具有在线攻击检测功能的室内移动机器人定位方法,其特征在于,所述移动机器人相对位姿递推公式为:
4.如权利要求1所述的具有在线攻击检测功能的室内移动机器人定位方法,其特征在于,所述获取移动机器人的位置信号,在所述移动机器人离散的状态空间表达式中,利用卡尔曼滤波算法估计移动机器人的最优位姿,具体为:
5.如权利要求4所述的具有在线攻击检测功能的室内移动机器人定位方法,其特征在于,所述利用卡尔曼滤波器将移动机器人的位置信号进行融合,计算出移动机器人在第k时刻的状态估计值,进一步得到移动机器人在第k时刻的位姿估计值,然后将估计值发送给攻击检测系统,包括:
6.如权利要求1所述的具有在线攻击检测功能的室内移动机器人定位方法,其特征在于,所述基于移动机器人的最优位姿估计值与位姿实际值进行比较,计算出两者的残差,使用卡方检测检测残差是否异常,实现移动机器人定位的在线攻击检测,包括:
7.如权利要求1所述的具有在线攻击检测功能的室内移动机器人定位方法,其特征在于,利用攻击检测函数判断移动机器人定位的在线攻击,具体为:
8.具有在线攻击检测功能的室内移动机器人定位系统,其特征在于,包括:
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-7中任一项所述的具有在线攻击检测功能的室内移动机器人定位方法中的步骤。
10.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1-7中任一项所述的具有在线攻击检测功能的室内移动机器人定位方法中的步骤。
技术总结
本发明属于智能控制领域,提供了一种具有在线攻击检测功能的室内移动机器人定位方法及系统,包括根据移动机器人运动学模型,建立移动机器人离散的状态空间表达式,得到移动机器人相对位姿递推公式;获取移动机器人的位置信号,在所述移动机器人离散的状态空间表达式中,利用卡尔曼滤波算法估计移动机器人的最优位姿,实现移动机器人的相对定位;基于移动机器人的最优位姿估计值与位姿实际值进行比较,计算出两者的残差,使用卡方检测检测残差是否异常,实现移动机器人定位的在线攻击检测。提高移动机器人定位过程中对外部干扰的鲁棒性,减小移动机器人的定位误差,及时的检测到移动机器人系统遭受的攻击,提高检测的准确性。
技术研发人员:周琪,李金艳,李晓孟,马慧,李鸿一
受保护的技术使用者:广东工业大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!