一种驾驶场景生成方法、系统、设备及存储介质与流程
本发明属于车载激光雷达数据处理,涉及一种驾驶场景生成方法、系统、设备及存储介质。
背景技术:
1、当前对于实现自动驾驶,广为应用的是感知-决策规划-控制执行架构,其中感知是车辆从真实世界获取信息的源头,而激光雷达也逐渐进入乘用车传感器的序列,随着搭载量的提升其成本也会逐步下降。在未来l3-l5级别的自动驾驶实施中,激光雷达以其分辨率高、隐蔽性好、抗干扰能力更强等优势在车辆感知端占据较大的置信权重。对于完全自动驾驶,多源信息互为冗余将是保证安全行驶的必要条件。
2、基于视觉和毫米波雷达融合的场景重建技术已经在量产车型搭载,基本能够满足当前l2及以下的辅助驾驶感知需求,但是要面向l3-l5级别的智能驾驶,就需要信号源的多重冗余,以支持车辆的决策控制,当前基于激光雷达场景重建和数据应用尚在研发阶段并未广泛应用,主要的制约点在于当前激光雷达成本高、由机械式向固态雷达转换过程中、激光雷达数据量大需要高算力平台支持。
技术实现思路
1、本发明的目的在于解决现有技术中在自动驾驶的实际测试过程中,对于驾驶场景的重建大多是基于视觉和毫米波雷达,不能满足高级别的智能驾驶测试对于信号源的多重冗余需求的问题,提供一种驾驶场景生成方法、系统、设备及存储介质。
2、为达到上述目的,本发明采用以下技术方案予以实现:
3、一种驾驶场景生成方法,包括以下步骤:
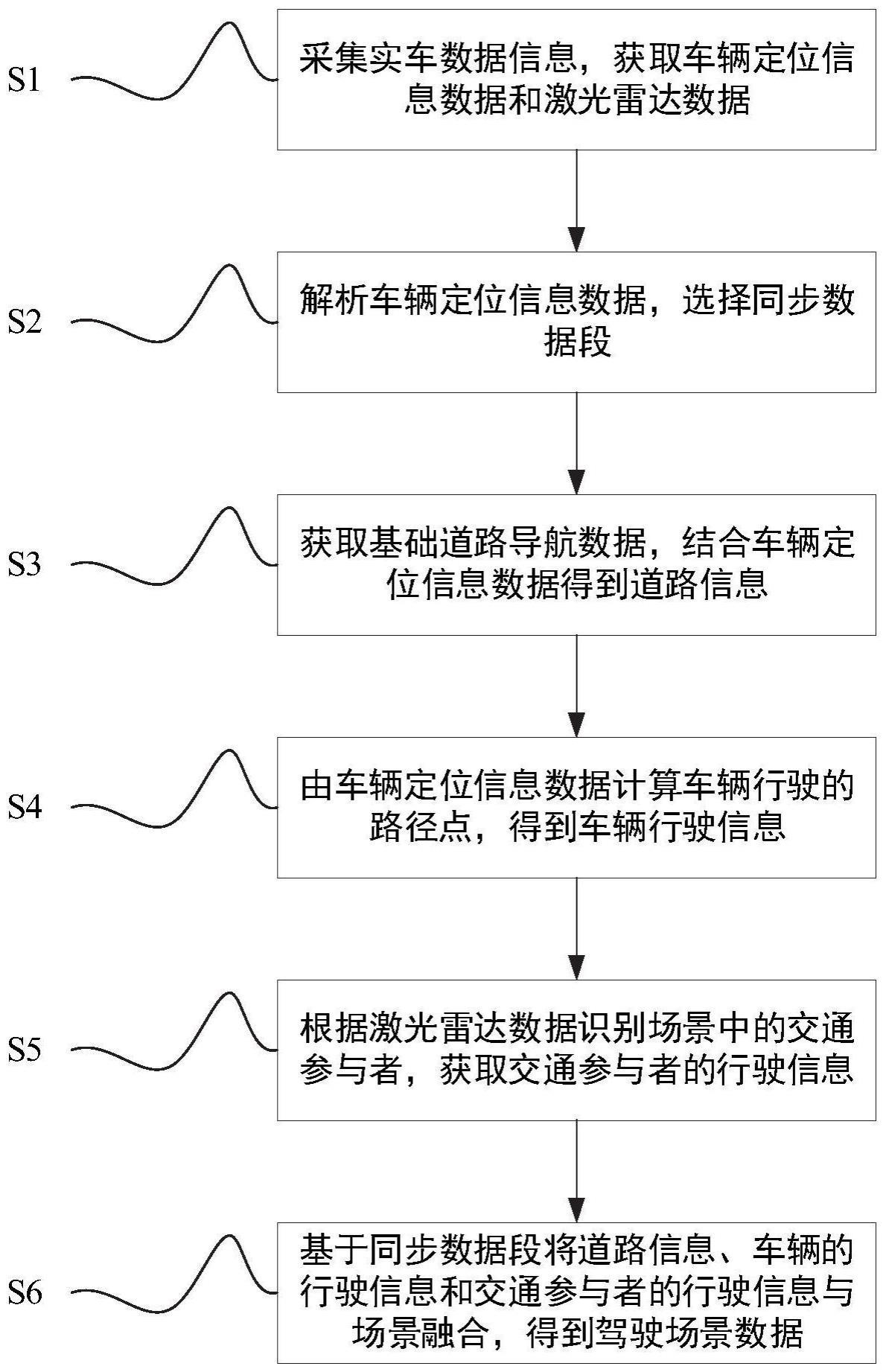
4、采集实车数据信息,获取车辆定位信息数据和激光雷达数据;
5、解析车辆定位信息数据,选择同步数据段;
6、获取基础道路导航数据,结合车辆定位信息数据得到道路信息;
7、由车辆定位信息数据计算车辆行驶的路径点,得到车辆行驶信息;
8、根据激光雷达数据识别场景中的交通参与者,获取交通参与者的行驶信息;
9、基于同步数据段将道路信息、车辆的行驶信息和交通参与者的行驶信息与场景融合,得到驾驶场景数据。
10、本发明的进一步改进在于:
11、所述采集实车数据信息具体为:车辆在城市结构化道路上行驶1km,采集车辆定位信息数据、车辆行驶状态信息数据、基础道路导航数据、激光雷达数据和车辆时间同步信息数据,将采集的实车数据通过车辆can模块、canfd模块或ethernet导出。
12、所述道路信息具体通过以下步骤获取:
13、根据基础道路导航数据和车辆定位信息数据提取车辆所行驶道路的道路网格;
14、获取道路网格的经纬度,根据经纬度确定导航地图范围,将车辆的行驶轨迹添加到导航地图中;
15、从提取的道路网格中获取道路信息,将道路信息作为场景中的道路标签信息。
16、所述道路信息包括道路中心、道路宽度、车道信息、坡度和道路名称。
17、所述解析车辆定位信息数据,是将数据具体解析为包含时间戳、速度、偏航率、纬度、经度和高程的结构体数组。
18、所述交通参与者的行驶信息具体通过以下步骤获取:
19、对激光雷达数据进行预处理,消除数据中的干扰点;
20、由自学习神经网络对激光雷达数据场景中的交通参与者进行识别;
21、获取交通参与者的行驶信息并输出。
22、所述交通参与者的行驶信息包括交通参与者的距离、数量、运行轨迹、速度、切入时间和切出时间。
23、一种驾驶场景生成系统,包括以下模块:
24、实车数据采集模块,所述试车数据采集模块用于采集实车数据信息,获取车辆定位信息数据和激光雷达数据;
25、数据解析处理模块,所述数据解析处理模块用于解析车辆定位信息数据,选择同步数据段;
26、道路信息获取模块,所述道路信息获取模块用于获取基础道路导航数据,结合车辆定位信息数据得到道路信息;
27、车辆行驶信息获取模块,所述车辆行驶信息获取模块用于由车辆定位信息数据计算车辆行驶的路径点,得到车辆行驶信息;
28、激光雷达数据识别模块,所述激光雷达数据识别模块用于根据激光雷达数据识别场景中的交通参与者,获取交通参与者的行驶信息;
29、驾驶场景搭建模块,所述驾驶场景搭建模块基于同步数据段将道路信息、车辆的行驶信息和交通参与者的行驶信息与场景融合,得到驾驶场景数据。
30、一种设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如前项任一项所述方法的步骤。
31、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如前项任一项所述方法的步骤。
32、与现有技术相比,本发明具有以下有益效果:
33、本发明提出了一种驾驶场景生成方法,通过获取车辆定位信息数据和激光雷达数据,基于同步数据段将道路信息、车辆的行驶信息和交通参与者的行驶信息与场景融合形成可回放的驾驶场景数据,将驾驶场景应用于决策控制算法的开发和仿真,能够有效的弥补实际测试中自动驾驶场景无法遍历的问题,并且激光雷达相较于毫米波雷达具有分辨率高、隐蔽性好、抗干扰能力更强的优点,能够满足高级别的智能驾驶测试对于信号源的需求。
技术特征:
1.一种驾驶场景生成方法,其特征在于,包括以下步骤:
2.如权利要求1所述的一种驾驶场景生成方法,其特征在于,所述采集实车数据信息具体为:车辆在城市结构化道路上行驶1km,采集车辆定位信息数据、车辆行驶状态信息数据、基础道路导航数据、激光雷达数据和车辆时间同步信息数据,将采集的实车数据通过车辆can模块、canfd模块或ethernet导出。
3.如权利要求1所述的一种驾驶场景生成方法,其特征在于,所述道路信息具体通过以下步骤获取:
4.如权利要求1所述的一种驾驶场景生成方法,其特征在于,所述道路信息包括道路中心、道路宽度、车道信息、坡度和道路名称。
5.如权利要求1所述的一种驾驶场景生成方法,其特征在于,所述解析车辆定位信息数据,是将数据具体解析为包含时间戳、速度、偏航率、纬度、经度和高程的结构体数组。
6.如权利要求1所述的一种驾驶场景生成方法,其特征在于,所述交通参与者的行驶信息具体通过以下步骤获取:
7.如权利要求1所述的一种驾驶场景生成方法,其特征在于,所述交通参与者的行驶信息包括交通参与者的距离、数量、运行轨迹、速度、切入时间和切出时间。
8.一种驾驶场景生成系统,其特征在于,包括以下模块:
9.一种设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1-7任一项所述方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1-7任一项所述方法的步骤。
技术总结
本发明公开了一种驾驶场景生成方法、系统、设备及存储介质,方法包括采集实车数据信息,获取车辆定位信息数据和激光雷达数据;解析车辆定位信息数据,选择同步数据段;获取基础道路导航数据,结合车辆定位信息数据得到道路信息;由车辆定位信息数据计算车辆行驶的路径点,得到车辆行驶信息;根据激光雷达数据识别场景中的交通参与者,获取交通参与者的行驶信息;基于同步数据段将道路信息、车辆的行驶信息和交通参与者的行驶信息与场景融合,得到驾驶场景数据。将道路信息、车辆的行驶信息和交通参与者的行驶信息与场景融合,形成可回放的驾驶场景数据,应用于决策控制算法的开发和仿真,能够有效的弥补实际测试中自动驾驶场景无法遍历的问题。
技术研发人员:张智飞,王殿国,严天恩
受保护的技术使用者:奇瑞新能源汽车股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!