一种对激光成像雷达对空间非合作目标的测距测角方法
本发明涉及航空航天,特别涉及一种对激光成像雷达对空间非合作目标的测距测角方法。
背景技术:
1、在空间交会对接过程中,在中短距离段要求测量追踪器与目标的相对距离、方位角和俯仰角等参数,作为控制引导追踪器逼近目标的关键参数。激光成像雷达作为空间交会对接测量系统中的重要测量传感器之一,可以直接对目标进行三维成像,通过三维图像的处理获得所要求的距离、角度、姿态等相对运动参数。对光线基本上不敏感,因此在空间应用技术上具有巨大的潜力。
2、目前对于合作目标的交会对接测量技术较为成熟,目标安装了雷达应答机、角反射器等合作设备,在中短距离采用激光测距和光学成像传感器组成的复合式测量系统,完成相对距离和方位的测量任务。对于非合作目标,目前常用扫描式的激光测距仪与光学相机的组合装置。激光测距仪和相机安装在可以两轴扫描的结构框架上,由红外或可见光相机进行目标搜索和方位测量,然后引导激光测距仪指向目标并测量相对距离。这种组合装置的测量系统要求精确指向目标,并且具有跟踪能力,才可以引导激光测距仪指向目标。但激光测距仪仅具备单点的测距能力,光学相机对光线较为敏感,因此测量能力具有一定的局限性。
技术实现思路
1、本发明意在提供一种对激光成像雷达对空间非合作目标的测距测角方法,以解决现有的测量系统无法实现非合作目标跟踪测量的问题。
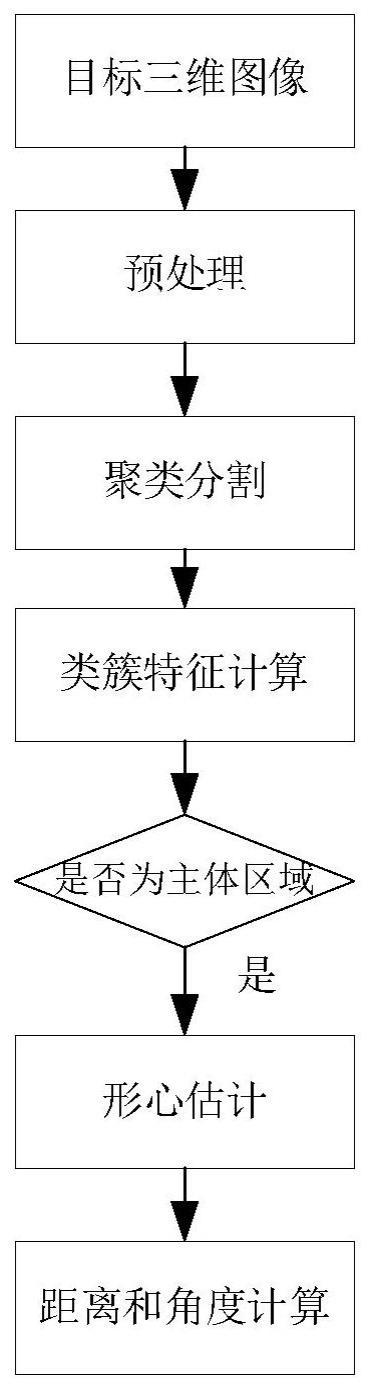
2、为了达到上述目的,本发明的技术方案如下:一种对激光成像雷达对空间非合作目标的测距测角方法,包括如下步骤:
3、s1、对激光成像雷达获取的目标三维点云数据进行去噪和均匀采样的预处理操作;
4、s2、对预处理后的点云进行分割以区分目标的不同构件,提取出其中感兴趣的目标区域;
5、s3、目标本体识别:目标点云被分为了不同的类簇;计算每个类簇的三维中心及平面度特征,通过中心、平面度的比较,将具有较大面积和平面度的帆板区域剔除,提取出其中本体区域的点云;
6、s4、形心估计:识别出目标本体q后,计算本体点云的形心坐标(xq,yq,zq);
7、
8、其中,n是本体点云q的点数,(xi,yi,zi)是本体点云中的三维点坐标;
9、s5、距离和角度计算:提取出目标的形心后,通过下式计算目标形心和激光成像雷达测量原点的视线方向的距离和方位角θx、高低角θz;
10、
11、
12、
13、进一步的,步骤s1中预处理的具体步骤如下:
14、s1.1、对激光成像雷达获得的目标三维点云数据进行基于局部距离统计分析的去噪处理,去除测量点云中离散的空间噪点;对每个点的邻域进行统计分析,计算每个点与邻域点的平均距离;计算平均距离量的分布特征均值和标准差,大于全局平均距离的分布均值和标准差定义阈值的点,被认为是离群点并进行剔除;
15、s1.2、采用基于体素滤波的点云下采样方法,进行点云均匀采样;将点云按照一定的间隔划分为三维体素方格;每个体素格内保留一个点,选取离体素中心最近的点作为该体素内的保留点,对所有体素处理后,得到均匀采样后的点云。
16、进一步的,步骤s2的分割方法如下:对点云进行三维体素化处理,然后扫描每个体素进行连通域标记,最终将具有连通特性的区域归为一类;具体包括:
17、s2.1、三维体素化处理:计算目标点云数据p在x、y、z三个坐标方向上的最大最小值,确定包围所有点的最小长方体;设定每个体素的尺寸大小d,将最小长方体按照d进行划分,分成n个体素c集合;最后对于点云数据中的每个点p(x,y,z),确定每个所在的体素索引c(i,j,k),并将空白体素删除;确定每个点所处体素的方法为:设在点云数据中的一点p(x,y,z)∈p,其所处的体素索引为(i,j,k);
18、
19、上式中,d为体素尺寸,xmin为点云数据在x方向上的最小值,ymin为点云数据在y方向上的最小值,zmin为点云数据在z方向上的最小值;
20、s2.2、连通性检查:对于每个ck∈c(k=1,2,……n),检查其6-邻域或者24-邻域中是否存在相连的体素;如果存在则将该体素内的点和其邻域体素中的点划分为一类,并进行类号标记,否则视为一个新的类;遍历检查所有体素格,直到所有体素都被标记。
21、与现有技术相比,本方案的有益效果:
22、本方案可实现基于激光成像雷达的空间非合作目标测距测角,通过去噪、均匀采样、聚类分割等技术,准确提取感兴趣区域的目标点云,从而实现从对目标形心的高精度测量。与现有技术相比,激光成像雷达可以同时高精度测量目标的距离和角度,可与现有的测距测角系统互为备份,提高系统的可靠性和冗余度。
技术特征:
1.一种对激光成像雷达对空间非合作目标的测距测角方法,其特征在于:包括如下步骤:
2.根据权利要求1所述的一种对激光成像雷达对空间非合作目标的测距测角方法,其特征在于:步骤s1中预处理的具体步骤如下:
3.根据权利要求1所述的一种对激光成像雷达对空间非合作目标的测距测角方法,其特征在于:步骤s2的分割方法如下:对点云进行三维体素化处理,然后扫描每个体素进行连通域标记,最终将具有连通特性的区域归为一类;具体包括:
技术总结
本发明专利公开了一种对激光成像雷达对空间非合作目标的测距测角方法,具体涉及航空航天技术领域。包括如下步骤:S1、对激光成像雷达获取的目标三维点云数据进行去噪和均匀采样的预处理操作;S2、对预处理后的点云进行分割以区分目标的不同构件,提取出其中感兴趣的目标区域;S3、目标本体识别:目标点云被分为了不同的类簇;计算每个类簇的三维中心及平面度特征,通过中心、平面度的比较,将具有较大面积和平面度的帆板等区域剔除,提取出其中本体区域的点云;S4、形心估计;S5、距离和角度计算。本发明解决了现有的测量系统无法实现非合作目标跟踪测量的问题,可与现有的测距测角系统互为备份,提高系统的可靠性和冗余度。
技术研发人员:王凤香,黄庚华,刘鸿彬,舒嵘
受保护的技术使用者:中国科学院上海技术物理研究所
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!