一种航标碰撞检测系统的制作方法
本发明涉及航标碰撞检测,具体涉及一种航标碰撞检测系统。
背景技术:
1、随着社会经济的发展,水上交通日益繁忙,每天成千上万的船舶停靠在各个码头和港口,更有不计其数的船舶在各水路交通干线上繁忙行驶。随着船舶数量的不断增加,水路交通安全事故频发,如何有效监管和协查就成为安全管理的重点。航标作为水路运输最重要的载体,也是水运安全管理的核心。因此,如何自动识别出在对航标发生的事故以及事故追溯是水路交通安全监管的重要环节。
2、当航标安装在书面上时,由于各种原因,经常发生航标遭遇碰撞,然后逃逸,一方面,航标损害不容易发现,同时,寻找肇事者也是一个非常大的难题。当航标安装在书面上时,由于各种原因,经常发生航标遭遇碰撞,然后逃逸;另一方面,航标损害不容易发现,同时,寻找肇事者也是一个非常大的难题。
技术实现思路
1、本发明的目的是针对现有技术存在的不足,提供一种航标碰撞检测系统。
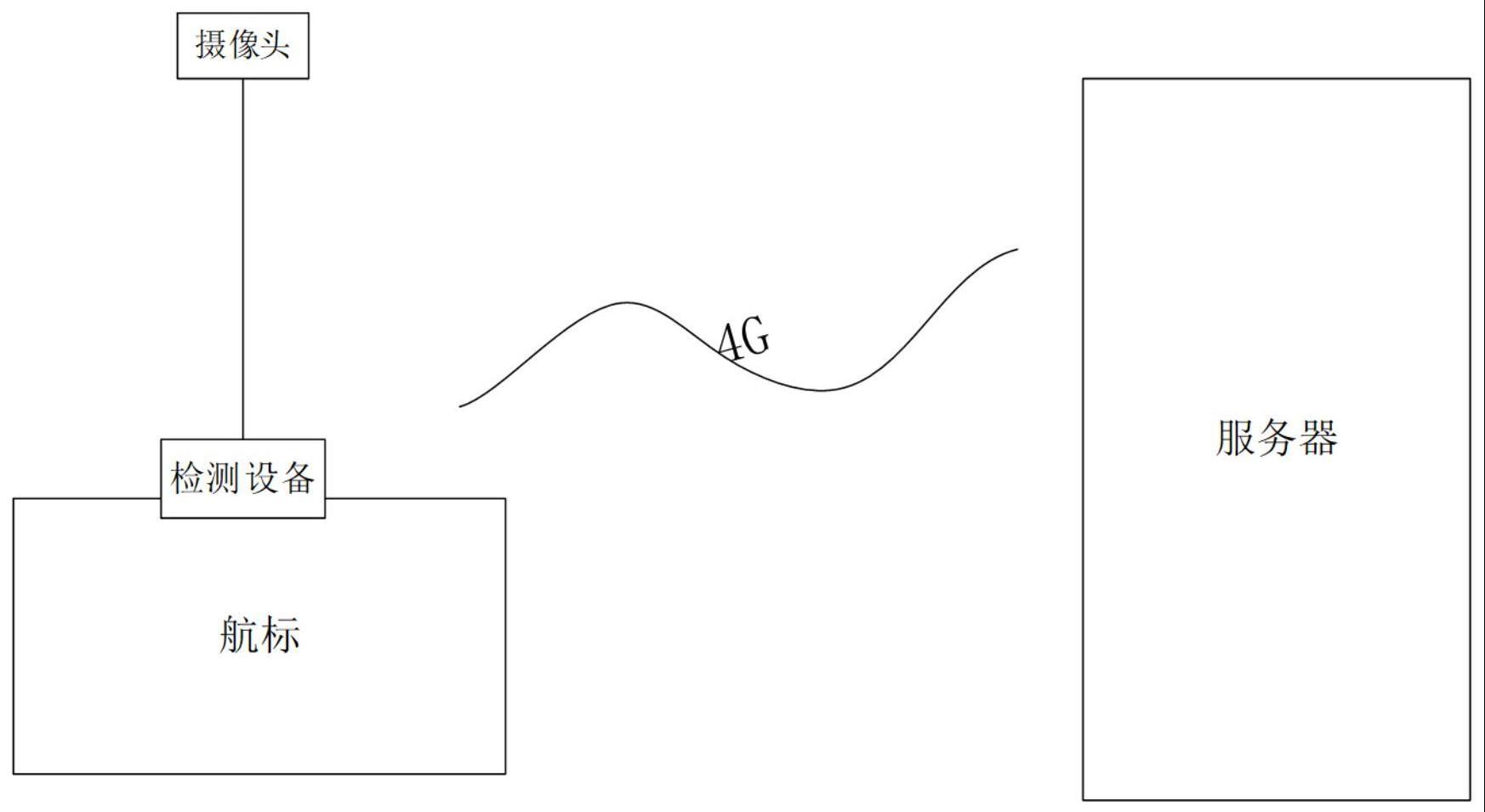
2、为实现上述目的,本发明提供了一种航标碰撞检测系统,包括安装在航标上的检测设备和与所述检测设备连接的服务器;
3、所述检测设备包括:
4、姿态传感器,用以采集航标的角度信息,所述角度信息包括水平旋转角度信息和倾斜角度信息,所述姿态传感器根据角度信息判断当前航标有无发生碰撞事件,若有,则生成碰撞信息;
5、主控单元,与所述姿态传感器连接,以接收所述航标的角度信息和碰撞信息;
6、雷达模块,与所述主控单元连接,所述主控单元在控制雷达模块在360°范围内进行水平扫描,并输出360°的点云数据,所述雷达模块的初始零度角与姿态传感器的零度角重合;所述主控单元还根据航标的角度信息计算当前航标初始角度相对于零度角航标朝向角度和倾角,并根据当前获取的航标角度、倾角,对点云数据进行校准偏移和旋转,以还原成水平点云数据,并将还原后的点云数据与历史水平点云数据进行对比,以判断当前是否有移动目标,若有移动目标,则计算所述移动目标相对于零度角的朝向、距离,以及移动目标的移动方向;
7、视频采集单元,与所述主控单元连接,所述主控单元在移动目标的距离小于设定距离阈值时控制视频采集单元对航标的四周进行拍摄,以获取航标四周的图片数据和视频数据,并将拍摄的视频数据进行拼接,所述视频采集单元的零度角与姿态传感器和雷达模块的初始零度角重合;
8、通信模块,与主控单元连接,用以在主控单元收到碰撞信息时将所述移动目标相对于零度角的朝向、距离以及移动目标的移动方向、图片数据、视频数据发送至服务器进行存储。
9、进一步的,所述服务器还根据所述移动目标相对于零度角的朝向、距离以及移动目标的移动方向、图片数据对移动目标进行识别,若所述移动目标识别为船舶,则发出预警信号。
10、进一步的,所述视频采集单元、姿态传感器和雷达模块的初始零度角为正北方向。
11、进一步的,所述视频采集单元包括4个分别朝向四侧的摄像头。
12、进一步的,对航标的四周进行拍摄的方式如下:
13、按照设定的顺序依次采集四个摄像头的视频帧,然后启动视频拼接,以将四帧图像拼接为一帧,最后对拼接后的图像进行压缩。
14、进一步的,根据航标的角度信息对点云数据进行校准偏移和旋转的方式具体如下:
15、获取姿态传感器的倾角数据,并将倾斜的点云图以雷达探测器为原点进行正北方向平面、正东方向平面进行法向量旋转,计算输出为水平的点云数据;
16、根据姿态传感器的正北朝向数据,计算需要旋转的角度,然后将点云数据以雷达探测器为原点旋转为零度角朝向正北。
17、进一步的,所述主控单元控制通信模块发送数据的方式如下:
18、生成一个报警记录;
19、上送报警记录对应的移动目标相对于零度角的朝向、距离,以及移动目标的移动方向;
20、上送报警记录对应的移动目标的图片数据;
21、上送报警记录对应的移动目标的视频数据;
22、如果上送不成功,延迟一分钟,继续上送,收到服务器确认,删除记录。
23、进一步的,还包括定位模块,与主控单元连接,用以采集航标的航标自身的经纬度信息,在移动目标的距离小于设定距离阈值时,所述控制单元控制通信模块将航标自身的经纬度信息发送至服务器。
24、有益效果:本发明安装于航标上面,系统安装于网络,航标检测附近的可能靠近的船只,并启动跟踪系统以及图片,视频拍摄系统,实时采集相应的视频,上传到服务器进行识别、保存。
技术特征:
1.一种航标碰撞检测系统,其特征在于,包括安装在航标上的检测设备和与所述检测设备连接的服务器;
2.根据权利要求1所述的一种航标碰撞检测系统,其特征在于,所述服务器还根据所述移动目标相对于零度角的朝向、距离以及移动目标的移动方向、图片数据对移动目标进行识别,若所述移动目标识别为船舶,则发出预警信号。
3.根据权利要求1所述的一种航标碰撞检测系统,其特征在于,所述视频采集单元、姿态传感器和雷达模块的初始零度角为正北方向。
4.根据权利要求1所述的一种航标碰撞检测系统,其特征在于,所述视频采集单元包括4个分别朝向四侧的摄像头。
5.根据权利要求4所述的一种航标碰撞检测系统,其特征在于,对航标的四周进行拍摄的方式如下:
6.根据权利要求1所述的一种航标碰撞检测系统,其特征在于,根据航标的角度信息对点云数据进行校准偏移和旋转的方式具体如下:
7.根据权利要求1所述的一种航标碰撞检测系统,其特征在于,所述主控单元控制通信模块发送数据的方式如下:
8.根据权利要求1所述的一种航标碰撞检测系统,其特征在于,还包括定位模块,与主控单元连接,用以采集航标的航标自身的经纬度信息,在移动目标的距离小于设定距离阈值时,所述控制单元控制通信模块将航标自身的经纬度信息发送至服务器。
技术总结
本发明公开了一种航标碰撞检测系统。该系统包括检测设备和与所述检测设备连接的服务器;检测设备包括姿态传感器,用以采集航标的角度信息和碰撞信息;主控单元与姿态传感器连接,以接收航标的角度信息和碰撞信息;雷达模块与主控单元连接,主控单元在接收到碰撞信息时控制雷达模块在360°范围内进行水平扫描;视频采集单元与主控单元连接,主控单元在接收到碰撞信息时用以对航标的四周进行拍摄,以获取航标四周的图片数据和视频数据,并将拍摄的视频数据进行拼接。本发明安装于航标上面,系统安装于网络,航标检测附近的可能靠近的船只,并启动跟踪系统以及图片,视频拍摄系统,实时采集相应的视频,上传到服务器进行识别、保存。
技术研发人员:李峰,周彬,张铭,曾乐,施勤,唐风建,姜荣,张俊杰,朱忠辉
受保护的技术使用者:长江上海航道处
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!