代价地图的处理方法、装置、电子设备及移动工具与流程
本申请涉及移动工具感知,尤其涉及一种代价地图的处理方法、装置、电子设备及移动工具。
背景技术:
1、移动工具,例如可自主移动的移动机器人为了在动态的环境中实现自主移动,需要具备感知环境的能力。为了规避障碍,会在移动机器人上安装多种类型的传感器,例如激光雷达、相机、超声波探测器等,不同传感器的影响和作用范围不一致。
2、相关技术中,移动机器人无法直接利用传感器输出的原始数据进行导航,需要经过一系列的处理转化成移动机器人能够利用的数据格式。代价地图就是移动机器人进行局部避障时常用的一种数据格式。在代价地图中,将移动机器人周围的空间划分为若干栅格以表示真实世界对应的单位面积,将检测到的障碍点映射至对应的栅格中,用不同的数值作为代价值以表示障碍物存在的可能性。另外,在确定障碍物位置的基础上,按照预设的膨胀策略在障碍物的周围栅格设置缓冲区,从而避免移动机器人与障碍物发生碰撞。
3、然而,移动机器人上安装的传感器的种类不同,对应的检测精度不同。但在当前的代价地图中,在获得不同种类的传感器的输出结果后,均采用相同的膨胀策略进行处理,无法准确体现出不同传感器的检测精度和作用范围。
技术实现思路
1、为解决或部分解决相关技术中存在的问题,本申请提供一种代价地图的处理方法、装置、电子设备及移动工具,对不同传感器的输出结果采用对应的膨胀参数,充分利用不同传感器的性能,提高利用代价地图进行路径规划的安全性。
2、本申请第一方面提供一种代价地图的处理方法,其包括:
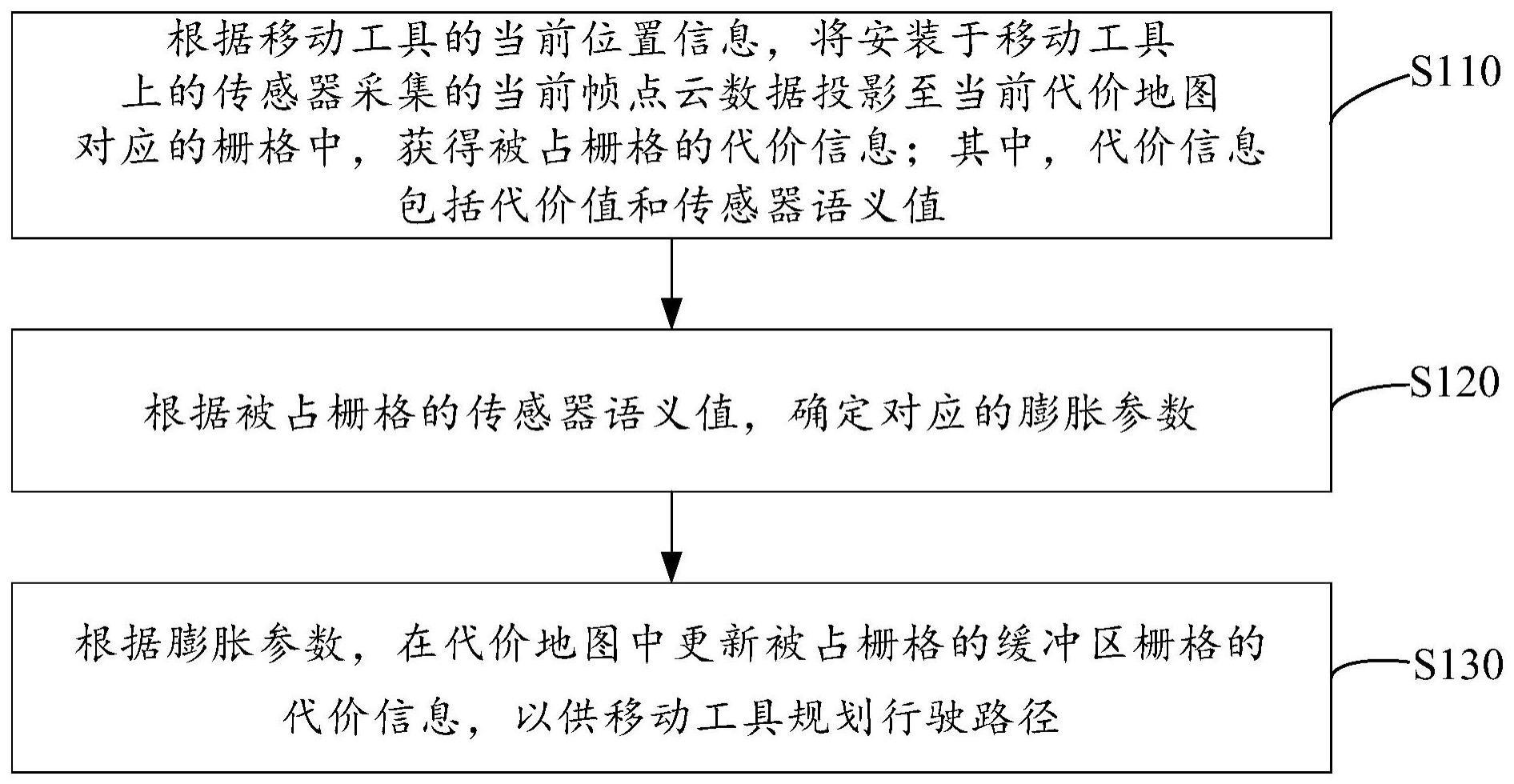
3、根据移动工具的当前位置信息,将安装于所述移动工具上的传感器采集的当前帧点云数据投影至当前代价地图对应的栅格中,获得被占栅格的代价信息;其中,所述代价信息包括代价值和传感器语义值;
4、根据所述被占栅格的传感器语义值,确定对应的膨胀参数;
5、根据所述膨胀参数,在所述代价地图中更新所述被占栅格的缓冲区栅格的代价信息,以供所述移动工具规划行驶路径。
6、一些实施方式中,单个所述栅格具有对应的预设存储容量以存储所述代价信息,其中,所述预设存储容量的第一存储单元用于存储所述代价值,所述预设存储容量的第二存储单元用于存储传感器语义值。
7、一些实施方式中,所述方法还包括:
8、根据所述传感器的种类数,预先设置第二存储单元的位数和存储规则;其中,将一位第二存储单元与一种所述传感器对应,以用于分别存储对应的传感器语义值;或采用多位第二存储单元存储一种传感器对应的传感器语义值。
9、一些实施方式中,单个所述栅格对应的预设存储容量为1个字节,其中,n位第一存储单元用于存储所述代价值,m位第二存储单元用于存储传感器语义值,n和m为正整数,m≤(8-n)。
10、一些实施方式中,所述将安装于所述移动工具上的传感器采集的当前帧点云数据投影至当前代价地图对应的栅格中,获得被占栅格的代价信息,包括:
11、当传感器的种类为多种时,将不同种传感器采集的当前帧点云数据投影至当前代价地图对应的栅格中,分别获得同一被占栅格对应的初始代价信息,所述初始代价信息包括代价值和对应的初始传感器语义值;
12、将不同的初始代价信息中的初始传感器语义值进行比较,根据比较结果生成所述被占栅格的代价信息。
13、一些实施方式中,所述方法还包括:分别预先设置不同种类的传感器的膨胀参数,所述膨胀参数包括膨胀半径和衰减系数。
14、一些实施方式中,所述根据所述被占栅格的传感器语义值,确定对应的膨胀参数,包括:
15、当多位所述第二存储单元分别用于存储不同种类的传感器语义值时,根据所述代价信息中的各位第二存储单元对应的传感器类型和对应的传感器语义值,确定选取置信度更高的传感器对应的膨胀参数;或当多位所述第二存储单元用于存储一种传感器语义值时,根据代价信息中的传感器语义值对应的传感器种类,确定对应的膨胀参数。
16、一些实施方式中,所述方法还包括:当同一栅格具有多种不同的代价信息时,将多种代价信息中的代价值相互进行比较,根据比较结果更新对应的所述栅格的代价信息。
17、本申请第二方面提供一种代价地图的处理装置,其包括:
18、第一代价信息获取模块,用于根据移动工具的当前位置信息,将安装于所述移动工具上的传感器采集的当前帧点云数据投影至当前代价地图对应的栅格中,获得被占栅格的代价信息;其中,所述代价信息包括代价值和传感器语义值;
19、膨胀参数确定模块,用于根据所述被占栅格的传感器语义值,确定对应的膨胀参数;
20、第二代价信息获取模块,用于根据所述膨胀参数,在所述代价地图中更新所述被占栅格的缓冲区栅格的代价信息,以供所述移动工具规划行驶路径。
21、本申请第三方面提供一种电子设备,包括:
22、处理器;以及
23、存储器,其上存储有可执行代码,当所述可执行代码被所述处理器执行时,使所述处理器执行如上所述的方法。
24、本申请第四方面提供一种计算机可读存储介质,其上存储有可执行代码,当所述可执行代码被电子设备的处理器执行时,使所述处理器执行如上所述的方法。
25、本申请第五方面提供一种移动工具,其包括至少一个传感器和上述的电子设备,所述传感器用于采集周围环境的点云数据,并将所述点云数据传输给所述电子设备。
26、本申请提供的技术方案可以包括以下有益效果:
27、本申请的技术方案,根据不同种类的传感器,可以在代价地图对应的被占栅格的代价信息中进行体现,一方面,可以根据更多维度的代价信息直接确认该被占栅格的障碍物信息检测来源,即由何种传感器采集获得;另一方面,根据代价信息中的传感器语义值,可以灵活选择对应的膨胀参数以设置缓冲区的范围和对应缓冲区栅格的代价信息,从而便于系统规划出更优的避障路径,充分利用不同传感器的检测精度以提高移动工具的行驶安全。
28、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种代价地图的处理方法,其特征在于,包括:
2.根据权利要求1所述的处理方法,其特征在于:
3.根据权利要求2所述的处理方法,其特征在于,所述方法还包括:
4.根据权利要求2或3所述的处理方法,其特征在于:
5.根据权利要求1所述的处理方法,其特征在于,所述将安装于所述移动工具上的传感器采集的当前帧点云数据投影至当前代价地图对应的栅格中,获得被占栅格的代价信息,包括:
6.根据权利要求1所述的处理方法,其特征在于,所述方法还包括:
7.根据权利要求3所述的处理方法,其特征在于,所述根据所述被占栅格的传感器语义值,确定对应的膨胀参数,包括:
8.根据权利要求2所述的处理方法,其特征在于,所述方法还包括:
9.一种代价地图的处理装置,其特征在于,包括:
10.一种电子设备,其特征在于,包括:
11.一种计算机可读存储介质,其上存储有可执行代码,当所述可执行代码被电子设备的处理器执行时,使所述处理器执行如权利要求1-8中任一项所述的方法。
12.一种移动工具,其特征在于,包括至少一个传感器和权利要求10所述的电子设备,所述传感器用于采集周围环境的点云数据,并将所述点云数据传输给所述电子设备。
技术总结
本申请涉及一种代价地图的处理方法、装置、电子设备及移动工具。该方法包括:根据机器人的当前位置信息,将安装于机器人上的传感器采集的当前帧点云数据投影至当前代价地图对应的栅格中,获得被占栅格的代价信息;其中,代价信息包括代价值和传感器语义值;根据被占栅格的传感器语义值,确定对应的膨胀参数;根据膨胀参数,在代价地图中更新被占栅格的缓冲区栅格的代价信息,以供机器人规划行驶路径。本申请提供的方案,能够对不同传感器的输出结果采用对应的膨胀参数,充分利用不同传感器的性能,提高利用代价地图进行路径规划的安全性。
技术研发人员:请求不公布姓名
受保护的技术使用者:北京智行者科技股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!