一种基于无人机的模拟森林冠层氮沉降方法
本发明属于资源与环境,尤其涉及一种基于无人机的模拟森林冠层氮沉降方法。
背景技术:
1、森林作为陆地生态系统的主体,其结构复杂、高大的林冠层是大气氮沉降的直接承受者,因缺乏将氮肥喷施到冠层上方的有效手段,已开展的森林模拟氮沉降试验多为林下施氮方式,忽略了自然氮沉降过程中林冠层对氮素的吸附、吸收、转化和截留等重要过程,无法评估氮沉降对冠层生物多样性的影响,亦会高估氮沉降对林下植被系统和土壤状况的影响,导致森林生态系统对大气氮沉降响应和适应机制的研究可能存在较大的不确定性。现有模拟林冠氮沉降技术中,大多是在林内铺设管道,再定期通过动力设施使用压力把溶液从位于地面的容器中自下而上地喷施到森林冠层上方。由于这种方式需要在林内进行施工埋管线,架设动力电源,所需机电、控制等系统前期投入较高,并且工程设施对森林原生植被破坏性较大,不易在自然保护区内复制或推广。同时,由于管道较长,在喷施过程中容易出现溶液残留在管道内部的现象,不易对喷施数量实现精准控制,且残留液腐蚀管道内壁,增加后期维护成本。
技术实现思路
1、本发明的目的在于提出一种基于无人机的模拟森林冠层氮沉降方法,利用大疆t40农业无人机执行喷洒任务,以通过测绘无人机拍摄的样地航测照片、通过大疆智图软件重建的样地高清二维地图、通过rtk测量的准确样地四至位置坐标为基础,依据具体研究目标和任务,自由、灵活、个性化地构建喷施任务,并导入t40智能遥控器,定期执行飞行任务,使t40农业无人机在林业样地林冠层上方仿地飞行,均匀、准确地把不同浓度的氮溶液喷洒到冠层上方,完整模拟自然氮沉降过程。
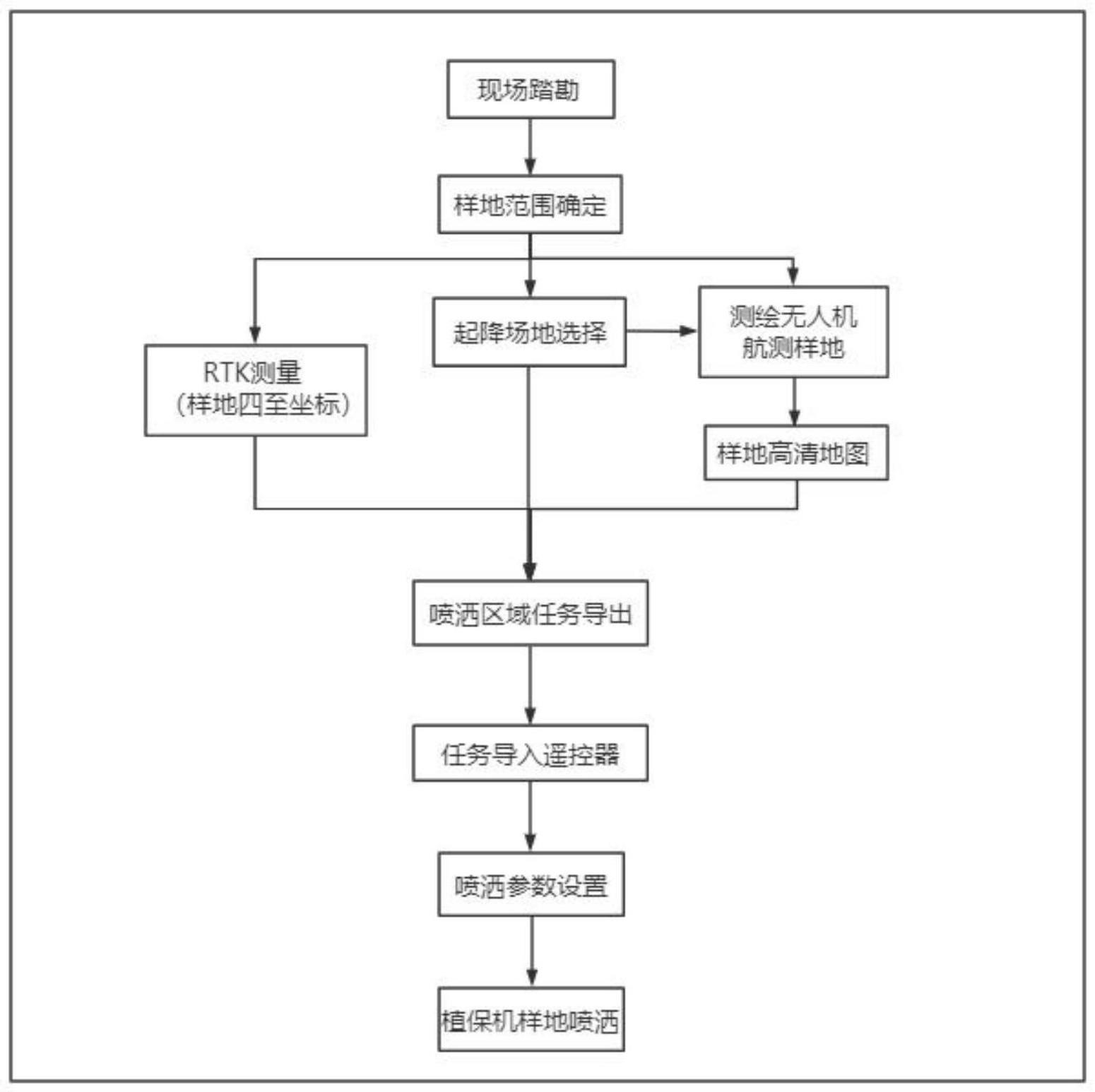
2、为实现上述目的,本发明提供了一种基于无人机的模拟森林冠层氮沉降方法,包括以下步骤:
3、对样地进行勘探和选址,确定样地范围和形状;
4、基于所述样地范围选取无人机起降场地,通过rtk技术测量所述样地获取所述样地的四至精确坐标,通过无人机测绘所述样地获取所述样地的高清地图;
5、将所述样地的四至坐标、所述无人机起降场地和所述样地的高清地图,构建样地任务,并将所述样地任务导入遥控器中;
6、通过所述遥控器设置喷洒参数,通过无人机对所述样地喷洒。
7、可选的,对样地进行勘探,确定样地范围,其中将所述样地划分为若干块不同浓度喷洒区域,每一块区域都为相同大小和规格;参照当地多年氮沉降均值,按照背景值0、1、2和3倍浓度设置为对照、低、中和高四种处理区域。
8、可选的,选取所述无人机起降场地需要满足的条件为:符合起飞高度条件的台地或小片空地且平坦少沙石的地面。
9、可选的,通过rtk技术测量所述样地获取所述样地的四至坐标的方法包括:
10、在确定所述样地范围和所述无人机起降场地的基础上,将gnss设备置样地四至位置,通过rtk技术在固定解状态下测量所述样地获取所述样地的四至坐标。
11、可选的,通过无人机测绘所述样地获取所述样地的高清地图的方法包括:通过所述无人机测绘对所述样地进行摄影测量2d飞行,获取所述样地正射影像与数字地表模型,通过大疆智图软件进行二维重建,获取所述样地的高清地图。
12、可选的,通过大疆智图软件进行二维重建,获取所述样地的高清地图的过程包括以下步骤:
13、打开软件后在左下角点击“新建任务”,随后主界面会弹出任务类型选择,重建任务选择“二维地图”;
14、在任务名称输入框中输入重建任务名称,并点击“确定”;
15、在右侧菜单栏中点击文件夹图标,并从计算机中选择建图前已完成的航拍任务对应的照片文件夹,以添加照片;点击二维地图栏,分辨率选择“低”;
16、二维地图栏中,场景选择“农田场景”,应用选择“农业应用”,选择完毕后即可点击“开始重建”。
17、可选的,根据研究目标特征(地形、树高信息)、具体实验目的和内容,通过所述遥控器设置喷洒参数,通过无人机对所述样地喷洒,其中所述喷洒参数包括:启航/返航速度、返航高度、无人机执行任务的行为、限制最高飞行高度、限制最远飞行距离、水平避险、喷洒系统设置、摇杆设置、飞行器rtk定位和网络rtk。
18、可选的,根据预设的模拟氮沉降浓度,将所述无人机携带有配置好的氮溶液,通过遥控器调用目标喷洒任务、按照遥控器智能规划的最优航线进行冠层氮溶液定量、均匀喷洒。
19、本发明技术效果:
20、1、本发明是高效、可靠、易于操作的方法,相较于传统人工林下施氮方式能够更加真实、完整、系统地模拟大气氮沉降对森林生态系统的影响机制,并且具有造价低、可复制的特点,可广泛推广、应用于相关实验。
21、2、本发明通过大疆t40农业无人机执行喷洒任务。大疆t40型号无人飞机具有大载重、高效率、强穿透、安全可靠、智能易用等优点,其配备的大流量磁力传动叶轮泵能够使内载溶液与电机完全隔离,具有抗腐蚀的特点。
22、3、本发明选用的大疆t40农业无人机配备双重雾化离心喷头,能够使雾滴大小更均匀,最大限度确保均匀喷洒,提高被喷洒溶液的利用率;其效喷幅为11米,能够满足喷洒作业要求,短时高效。
23、4、本发明选用的大疆t40农业无人机装载双目视觉和相控阵数字雷达组成空间智能感知系统,能够实现无人机飞行过程中的全自主三维连续绕障,即达到仿地飞行要求;借助仿地飞行功能,无人机能够适应不同地形,根据测区地形自动生成变高航线,保持地面分辨率一致,从而获取更好的数据效果。
24、5、本发明选用的大疆t40农业无人机装载全新超高清fpv摄像头,其云台俯仰可调、视野稳定,使得无人机能够自主采集地块图像;采集地形后可通过大疆t40全新智能遥控器本地离线建图,自动计算最优航线。
25、6、本发明通过rtk测量样地四至坐标,所选用的rtk(real timekinematic)实时动态测量技术,是以载波相位观测为根据的实时差分gps(rtdgps)技术,由基准站接收机、数据链、流动站接收机三部分组成,rtk是测量技术发展里程中的一个突破,与传统的gps作业相比具有作用范围广、精度高、野外单机作业等众多优点。
26、7、本发明所选用的rtk测量法能够得到满足实验要求的高精度数据(厘米级定位结果);相比于无人机测点法和遥控器测点法,rtk测量更适合野外样地四至位置的测量,能够准确测量出固定点的坐标,误差仅为±2cm;而无人机测点时无法准确停留在固定的四至位置,且遥控器测点法在林业样地中无法同时满足达到高精度测量和对准四至实地位置的测量条件,因此以rtk测量为基础的航线规划最为准确。
27、8、本发明为氮沉降试验提供新思路,对林地冠层喷洒氮溶液,充分考虑森林冠层对大气氮沉降的响应与森林植被结构在氮沉降模拟中的不同响应机制,避免冠层在氮沉降过程中的重要功能及作用被忽略,避免林下植被与土壤直接承受氮沉降,从生态系统完整性、系统性和复杂性的视角,研究自然氮沉降对森林生态系统的整体影响。
技术特征:
1.一种基于无人机的模拟森林冠层氮沉降方法,其特征在于,包括以下步骤:
2.如权利要求1所述的基于无人机的模拟森林冠层氮沉降方法,其特征在于,对样地进行勘探,确定样地范围,其中将所述样地划分为若干块不同浓度喷洒区域,每一块区域都为相同大小和规格;参照当地多年氮沉降均值,按照背景值0、1、2和3倍浓度设置为对照、低、中和高四种处理区域。
3.如权利要求1所述的基于无人机的模拟森林冠层氮沉降方法,其特征在于,选取所述无人机起降场地需要满足的条件为:符合起飞高度条件的台地或小片空地且平坦少沙石的地面。
4.如权利要求1所述的基于无人机的模拟森林冠层氮沉降方法,其特征在于,通过rtk技术测量所述样地获取所述样地的四至坐标的方法包括:
5.如权利要求1所述的基于无人机的模拟森林冠层氮沉降方法,其特征在于,通过无人机测绘所述样地获取所述样地的高清地图的方法包括:通过所述无人机测绘对所述样地进行摄影测量2d飞行,获取所述样地正射影像与数字地表模型,通过大疆智图软件进行二维重建,获取所述样地的高清地图。
6.如权利要求5所述的基于无人机的模拟森林冠层氮沉降方法,其特征在于,通过大疆智图软件进行二维重建,获取所述样地的高清地图的过程包括以下步骤:
7.如权利要求1所述的基于无人机的模拟森林冠层氮沉降方法,其特征在于,根据研究目标特征(地形、树高信息)、具体实验目的和内容,通过所述遥控器设置喷洒参数,通过无人机对所述样地喷洒,其中所述喷洒参数包括:启航/返航速度、返航高度、无人机执行任务的行为、限制最高飞行高度、限制最远飞行距离、水平避险、喷洒系统设置、摇杆设置、飞行器rtk定位和网络rtk。
8.如权利要求7所述的基于无人机的模拟森林冠层氮沉降方法,其特征在于,根据预设的模拟氮沉降浓度,将所述无人机携带有配置好的氮溶液,通过遥控器调用目标喷洒任务、按照遥控器智能规划的最优航线进行冠层氮溶液定量、均匀喷洒。
技术总结
本发明公开了一种基于无人机的模拟森林冠层氮沉降方法,包括以下步骤:对样地进行勘探,确定样地范围和形状;基于所述样地范围选取无人机起降场地,通过RTK技术测量所述样地获取所述样地的四至坐标,通过无人机测绘所述样地获取所述样地的高清地图;将所述样地的四至坐标、所述无人机起降场地和所述样地的高清地图,构建样地任务,并将所述样地任务导入遥控器中;通过所述遥控器设置模拟氮沉降量和沉降速率,利用无人机对所述样地进行均匀、精确喷施,克服目前林下施氮方式不能体现林冠对自然氮沉降的吸附、吸收、转化和截留等重要过程。
技术研发人员:原作强,邵依琳,林灿,徐玉燊,杨治春,马瑛瑛
受保护的技术使用者:西北工业大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!