一种自动驾驶地图的高精度更新方法、系统及装置与流程
本发明属于驾驶地图更新,具体地说,涉及一种自动驾驶地图的高精度更新方法、系统及装置。
背景技术:
1、目前,以自动驾驶模式运行(例如,无人驾驶)的车辆可以将乘员、尤其是驾驶员从一些驾驶相关的职责中解放出来。当以自动驾驶模式运行时,车辆可以使用车载传感器导航到各个位置,从而允许车辆在最少人机交互的情况下或在没有任何乘客的一些情况下行驶。自动驾驶车辆通常基于由路线与地图服务提供的路线进行驾驶。当规划用于驾驶自动驾驶车辆的路径时,道路以及道路内车道的配置是关键的。因此,地图的准确性非常重要。
2、自动驾驶高精度地图作为高级别自动驾驶不可或缺的关键技术,与自动驾驶感知、决策、定位等核心技术密切关联,是无人驾驶技术落地应用的关键基础与核心技术。目前高精度地图更新主要以专业采集车为主,通过覆盖式获取所在区域的高精度数据,经过后处理实现地图的高精度更新。
3、高精地图作为自动驾驶的重要一部分,其主要的作用是构建真实场景的三维模型以及生成语义地图,目前地图的精度已经达到厘米级,要满足自动驾驶的需求就要求地图能保证与真实场景相符,需要高频率地采集原始数据并生成地图,高精地图的最大难点就是实时更新。在现有的技术中,一般是每隔季度/年对之前构建的高精地图的区域进行整体建图,或者用户在使用过程中发现实际场景与高精地图相差较大时,也会进行一次更新,缺点是不能及时发现场景变化的时刻,并且,地图更新不及时,会直接影响自动驾驶车辆的安全性。
技术实现思路
1、要解决的问题
2、针对现有用户在使用过程中发现实际场景与高精地图相差较大时,也会进行一次更新,不能及时发现场景变化的时刻的问题,本发明提供一种自动驾驶地图的高精度更新方法、系统及装置。
3、技术方案
4、为解决上述问题,本发明采用如下的技术方案。
5、一种自动驾驶地图的高精度更新方法,采用以下步骤:
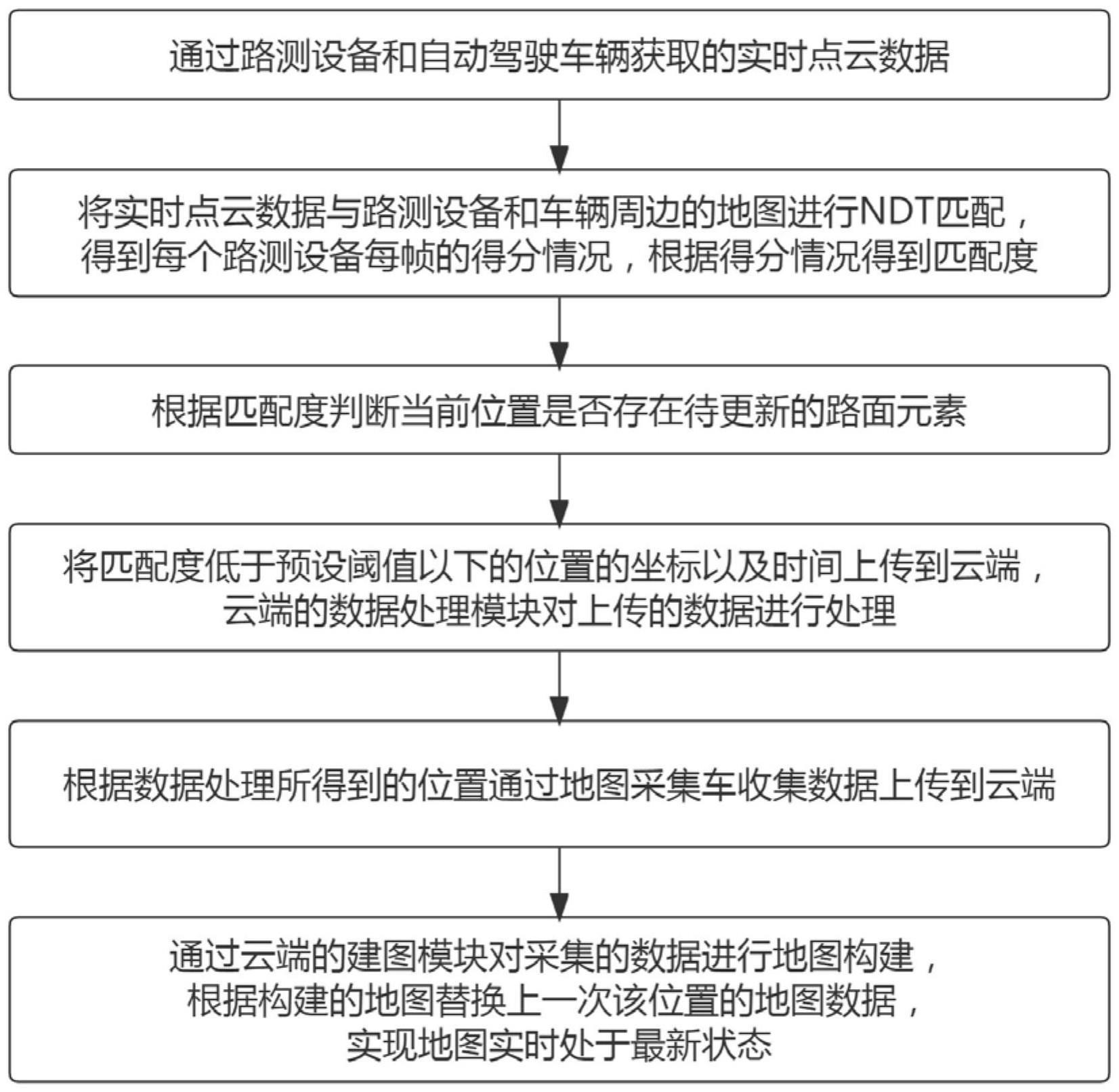
6、步骤1:通过路测设备和自动驾驶车辆获取的实时点云数据;
7、步骤2:将实时点云数据与路测设备和车辆周边的地图进行ndt匹配,得到每个路测设备每帧的得分情况,根据得分情况得到匹配度;
8、步骤3:根据匹配度判断当前位置是否存在待更新的路面元素;
9、步骤4:将匹配度低于预设阈值以下的位置的坐标以及时间上传到云端,云端的数据处理模块对上传的数据进行处理;
10、步骤5:根据数据处理所得到的位置通过地图采集车收集数据上传到云端;
11、步骤6:通过云端的建图模块对采集的数据进行地图构建,根据构建的地图替换上一次该位置的地图数据,实现地图实时处于最新状态。
12、优选地,所述步骤4中数据处理模块对上传的数据进行处理是让数据处理模块设置更新频率阈值,对重复位置数据进行剔除,进行地图原始数据采集。
13、优选地,所述云端内还设有设备诊断模块,所述设备诊断模块内存储有历史数据,对历史数据进行筛选,从历史数据中提取故障评估指标,根据故障评估指标数构建训练样本集,根据训练样本集建立故障因果关系模型,同时根据故障率、修复率、设备健康度和装置信度构建路测设备诊断评估模型。
14、进一步地,所述设备诊断模块内建立专家诊断知识库,专家诊断知识库内设有各故障事件、故障传播路径、故障征兆要素,以此建立各个事件之间的故障因果关系模型。
15、更进一步地,当路测设备诊断评估模型无法在数据库中寻找到对应的评估结果时,由专业人员进行高级评估诊断,同时将高级评估诊断保存至数据库中。
16、再进一步地,专业人员不仅会寻找新的故障原因、路径和解决方法,也会定期对专家诊断知识库内旧的数据进行修改和删除,重新对专家诊断知识库内的数据进行整理。
17、再进一步地,所述路测设备诊断评估模型会在与服务器通信连接时,每隔预设期限,服务器都发送更新后的路测设备诊断评估模型,路测设备接收后对存储的模型进行更新。
18、优选地,所述数据上传需要进行数据压缩,云端接收数据后进行数据解压,压缩数据和解压数据采用的是哈夫曼算法,压缩步骤首先统计数据中每个字节,然后根据数据字节构建哈夫曼树,再遍历哈夫曼树生成编码,最后储存压缩数据;解压步骤首先读取数据字节,然后构造哈夫曼编码树,最终读取压缩文件。
19、一种自动驾驶地图的高精度更新系统,包括:
20、数据采集模块,用于获取车辆的实时点云数据;
21、数据匹配模块,用于将实时点云数据进行ndt匹配,得到每个路测设备每帧的得分情况;
22、判断筛选模块,用于判断当前位置是否存在待更新的路面元素;
23、数据通信模块,用于将设备数据上传至云端,将云端数据发送至设备;
24、地图构建模块,用于进行地图构建,根据构建的地图替换上一次该位置的地图数据,实现地图实时处于最新状态。
25、一种自动驾驶地图的高精度更新装置,所述装置包括服务处理器和分布存储器,所述服务处理器连接所述存储器,所述分布存储器中存储有服务自管理程序,配置用于存储机器可读指令,所述服务处理器执行所述服务自管理程序,指令在由所述处理器执行时,以实现如上所述的自动驾驶地图的高精度更新方法。
26、一种自动驾驶地图的高精度更新方法、系统及装置,通过路测设备和自动驾驶车辆获取的实时点云数据,将实时点云数据与路测设备和车辆周边的地图进行ndt匹配,得到每个路测设备每帧的得分情况,根据得分情况得到匹配度,根据匹配度判断当前位置是否存在待更新的路面元素,将匹配度低于预设阈值以下的位置的坐标以及时间上传到云端,云端的数据处理模块对上传的数据进行处理,根据数据处理所得到的位置通过地图采集车收集数据上传到云端,通过云端的建图模块对采集的数据进行地图构建,根据构建的地图替换上一次该位置的地图数据,实现地图实时处于最新状态,高效地实现地图的更新,避免出现地图与实际场景不符的现象。
27、有益效果
28、相比于现有技术,本发明的有益效果为:
29、(1)本发明通过路测设备和自动驾驶车辆获取的实时点云数据,将实时点云数据与路测设备和车辆周边的地图进行ndt匹配,得到每个路测设备每帧的得分情况,根据得分情况得到匹配度,根据数据处理所得到的位置通过地图采集车收集数据上传到云端,通过云端的建图模块对采集的数据进行地图构建,根据构建的地图替换上一次该位置的地图数据,高效地实现地图的更新,避免出现地图与实际场景不符的现象;
30、(2)本发明通过采用哈夫曼算法进行视频数据压缩和解压,通过建立哈夫曼树对数据进行压缩和解压处理,运行速率高效,并且可以节省大量空间,节省出来的空间可以用来保存多一些数据,提供更好的数据质量;
31、(3)本发明通过建立专家诊断知识库,设有各故障事件、故障传播路径、故障征兆要素,以此建立各个事件之间的故障因果关系模型,该模型可以准确的获取评估出设备的故障原因和得到修复方法。
技术特征:
1.一种自动驾驶地图的高精度更新方法,其特征在于,采用以下步骤:
2.根据权利要求1所述的一种自动驾驶地图的高精度更新方法,其特征在于:所述步骤4中数据处理模块对上传的数据进行处理是让数据处理模块设置更新频率阈值,对重复位置数据进行剔除,进行地图原始数据采集。
3.根据权利要求1所述的一种自动驾驶地图的高精度更新方法,其特征在于:所述云端内还设有设备诊断模块,所述设备诊断模块内存储有历史数据,对历史数据进行筛选,从历史数据中提取故障评估指标,根据故障评估指标数构建训练样本集,根据训练样本集建立故障因果关系模型,同时根据故障率、修复率、设备健康度和装置信度构建路测设备诊断评估模型。
4.根据权利要求3所述的一种自动驾驶地图的高精度更新方法,其特征在于:所述设备诊断模块内建立专家诊断知识库,专家诊断知识库内设有各故障事件、故障传播路径、故障征兆要素,以此建立各个事件之间的故障因果关系模型。
5.根据权利要求4所述的一种自动驾驶地图的高精度更新方法,其特征在于:当路测设备诊断评估模型无法在数据库中寻找到对应的评估结果时,由专业人员进行高级评估诊断,同时将高级评估诊断保存至数据库中。
6.根据权利要求5所述的一种自动驾驶地图的高精度更新方法,其特征在于:专业人员不仅会寻找新的故障原因、路径和解决方法,也会定期对专家诊断知识库内旧的数据进行修改和删除,重新对专家诊断知识库内的数据进行整理。
7.根据权利要求6所述的一种自动驾驶地图的高精度更新方法,其特征在于:所述路测设备诊断评估模型会在与服务器通信连接时,每隔预设期限,服务器都发送更新后的路测设备诊断评估模型,路测设备接收后对存储的模型进行更新。
8.根据权利要求1所述的一种自动驾驶地图的高精度更新方法,其特征在于:所述数据上传需要进行数据压缩,云端接收数据后进行数据解压,压缩数据和解压数据采用的是哈夫曼算法,压缩步骤首先统计数据中每个字节,然后根据数据字节构建哈夫曼树,再遍历哈夫曼树生成编码,最后储存压缩数据;解压步骤首先读取数据字节,然后构造哈夫曼编码树,最终读取压缩文件。
9.一种自动驾驶地图的高精度更新系统,其特征在于,包括:
10.一种自动驾驶地图的高精度更新装置,其特征在于,所述装置包括服务处理器和分布存储器,所述服务处理器连接所述存储器,所述分布存储器中存储有服务自管理程序,配置用于存储机器可读指令,所述服务处理器执行所述服务自管理程序,指令在由所述处理器执行时,以实现如权利要求1-8所述的自动驾驶地图的高精度更新方法。
技术总结
本发明公开了一种自动驾驶地图的高精度更新方法、系统及装置,属于驾驶地图更新技术领域,包括路测设备和自动驾驶车辆获取的实时点云数据,将实时点云数据与路测设备和车辆周边的地图进行NDT匹配,得到每个路测设备每帧的得分情况,根据得分情况得到匹配度,根据匹配度判断当前位置是否存在待更新的路面元素,将匹配度低于预设阈值以下的位置的坐标以及时间上传到云端,云端的数据处理模块对上传的数据进行处理,根据数据处理所得到的位置通过地图采集车收集数据上传到云端,通过云端的建图模块对采集的数据进行地图构建,根据构建的地图替换上一次该位置的地图数据,实现地图实时处于最新状态,本发明能实现地图时刻处于最新状态。
技术研发人员:赵元丁,杨海松
受保护的技术使用者:北京清维如风科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!