一种多轴致动器检测系统的制作方法
本发明涉及到相机模组和马达的多轴致动器检测系统,所述马达包含多轴音圈马达、多轴记忆金属马达及多轴压电马达。
背景技术:
1、近年来具有拍摄功能的小型移动装置十分普及,应用范围亦不断扩展,包括智能手机﹑智能眼镜﹑运动相机﹑执法记录仪及行车记录仪。在所述装置中,包含至少一颗变焦(zoom)﹑自动对焦(auto-focus)或定焦(fixed-focus)小型相机模组(compact cameramodule)。因此,所述模组的市场很庞大,增长亦稳步上扬。
2、部份所述相机模组需要至少一个多轴致动器,实现不同功能,例如多轴防抖。由于所述多轴致动器的质量影响效果,所以需要可靠的检测系统,把不良品找出来,确保多轴致动器的良品率。现有主要采用如下两类检测系统:
3、第一类的检测系统采用激光测量方法(例如:us20120105833a1、kr19980086188a),检测致动器的多轴运动量,其测量精度及可靠性都较高;但是激光测量方法较难支持翻滚(roll)方向,无法以一个测量装置检测翻滚角度。另外,激光测量方法需要多个激光测量装置,才能支持多轴检测,导致设备成本上升。
4、第二类的检测系统采用相机测量方法(例如:jph1144522a、jp2011237379a、cn102829953b、cn 110300252b),检测致动器的多轴运动量,通常只需要一个相机,其设备成本通常较低。同样无法支持翻滚轴方向(例如:cn102829953b),或者翻滚轴的测量精度较低。
技术实现思路
1、综上所述,本发明的目的在于解决现有的多轴致动器检测系统无法支持翻滚轴方向检测翻滚角度,检测成本高,测量精度低等技术不足,而提出一种多轴致动器检测系统。
2、为解决本发明所提出的技术问题,采用的技术方案为:
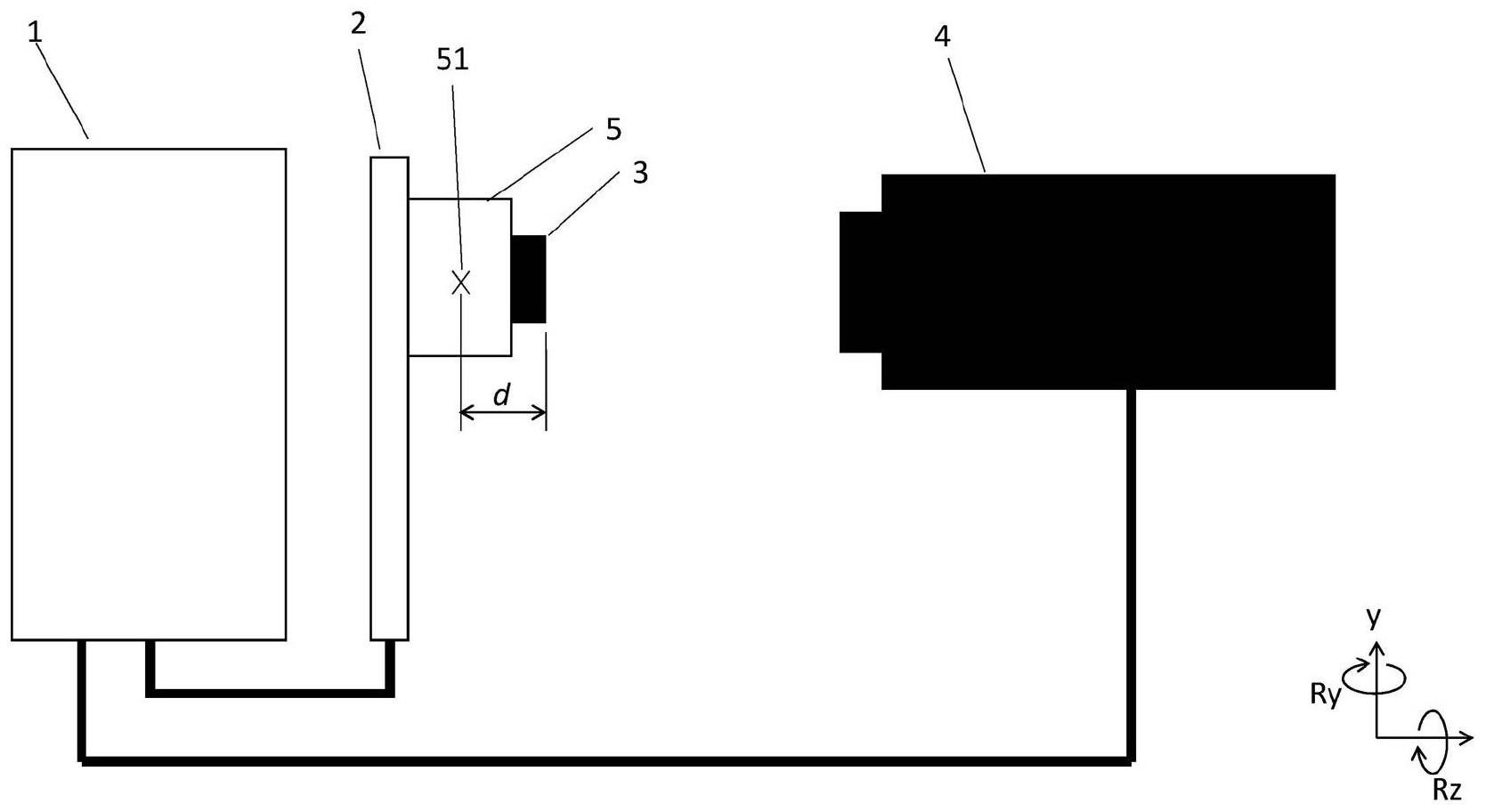
3、一种多轴致动器检测系统,其特征在于所述系统包含有:电子计算器、驱动板、目标图案及相机;驱动板连接多轴致动器,目标图案连接在多轴致动器的可动结构上,电子计算器分别连接驱动板和相机;所述的电子计算器通过驱动板改变多轴致动器的驱动信号,多轴致动器根据所述驱动信号执行对目标图案进行多轴运动;相机采集记录目标图案运动变化图像信号,并发送给所述电子计算器,由电子计算器根据目标图案运动变化图像信号计算出多轴致动器的实际多轴运动量,并与输出的驱动控制信号对应的标准运动量比对,判断多轴致器是否合格。
4、所述的多轴致动器具有rx方向、ry方向和rz方向运动的三轴自由度,计算rx方向的转动角度βx和ry方向的转动角度βy采用的方程式如下:
5、
6、
7、其中,δx表示目标图案往rx方向的位移量,δy表示目标图案往ry方向的位移量,d表示目标图案表面至多轴致动器的转轴距离。
8、所述的多轴致动器还具有rz方向运动的自由度,所述多轴致动器检测系统能通过测量目标图案往rz方向的转动,计算rz方向的转动角度βz。
9、所述的目标图案包含一个长方形,且长方形部分区域超出所述相机的图像读取区的一侧边缘。
10、所述的目标图案包含四个长方形,四个长方形部分区域分别超出所述相机的图像读取区的四侧边缘。
11、所述的目标图案包含有位于相机的图像读取区中心的圆形中心点,以及位于圆形中心点左右两侧的两个长方形,两个长方形部分区域超出所述相机的图像读取区的左右两侧边缘;所述的相机的图像读取区的宽度比高度大。
12、所述的目标图案为两种颜色的二维图案。
13、所述的目标图案为三维图案,包含一个中心点、两个长方形、一个斜面及三种颜色;所述一个斜面连接长方形的其中一个边缘;所述两个长方形及一个中心点的最上方设有颜色一;所述斜面设有颜色二;所有其他面设有颜色三;所述斜面的和多轴致动器的z轴之间的夹角是介乎0度和45度之间;根据所述斜面的面积变化,计算所述多轴致动器的rx方向转动角度βx,其方程式如下:
14、
15、a11是βx=0°时斜面11在图像中的面积,δa11是转动后斜面11在图像中的面积变化。
16、所述的目标图案为三维图案,包含四个长方形、八个斜面及一个中心点;四个长方形分别从相机的图像读取区的四个边缘处延伸出所述相机的图像读取区,每个长方形的两个边缘连接两个斜面;所述中心点的中心与相机的图像读取区中心距离少于相机的图像读取区宽度的30%及高度的30%;根据八个斜面的面积变化,所述电子计算器计算出多轴致动器rx方向转动角度βx及ry方向转动角度βy,其方程式如下:
17、
18、
19、a11、a12分别是βx=0°和βy=0°时与右侧长方形的两个边缘连接的两个斜面在相机采集图像中的面积,a21、a22分别是βx=0°和βy=0°时左侧长方形的两个边缘连接的两个斜面在相机采集图像中的面积,δa11,δa12,δa21及δa22分别是多轴致动器根据所述驱动信号执行对目标图案进行多轴运动后右侧长方形和左侧长方形的四个边缘连接的四个斜面在相机采集图像中的面积变化量;电子计算器根据中心点的位置变化,计算中心点在x及y方向的位移量;根据四个长方形的翻滚轴转动量,计算出多轴致动器rz方向转动角度βz。
20、本发明的有益效果为:本发明一种多轴致动器检测系统能支持包含翻滚方向的多轴运动量检测,能精准测量翻滚轴的运动量,并且只需一个相机,设备成本低,体积小。
技术特征:
1.一种多轴致动器检测系统,其特征在于所述系统包含有:电子计算器、驱动板、目标图案及相机;驱动板连接多轴致动器,目标图案连接在多轴致动器的可动结构上,电子计算器分别连接驱动板和相机;
2.根据权利要求1所述的一种多轴致动器检测系统,其特征在于:所述的多轴致动器具有rx方向和ry方向运动的两轴自由度,计算rx方向的转动角度βx和ry方向的转动角度βy采用的方程式如下:
3.根据权利要求2所述的一种多轴致动器检测系统,其特征在于:所述的多轴致动器还具有rz方向运动的自由度,所述多轴致动器检测系统能通过测量目标图案往rz方向的转动,计算rz方向的转动角度βz。
4.根据权利要求1所述的一种多轴致动器检测系统,其特征在于:所述的目标图案包含一个长方形,且长方形部分区域超出所述相机的图像读取区的一侧边缘。
5.根据权利要求1所述的一种多轴致动器检测系统,其特征在于:所述的目标图案包含四个长方形,四个长方形部分区域分别超出所述相机的图像读取区的四侧边缘。
6.根据权利要求1所述的一种多轴致动器检测系统,其特征在于:所述的目标图案包含有位于相机的图像读取区中心的圆形中心点,以及位于圆形中心点左右两侧的两个长方形,两个长方形部分区域超出所述相机的图像读取区的左右两侧边缘;所述的相机的图像读取区的宽度比高度大。
7.根据权利要求1所述的一种多轴致动器检测系统,其特征在于:所述的目标图案为两种颜色的二维图案。
8.根据权利要求1所述的一种多轴致动器检测系统,其特征在于:所述的目标图案为三维图案,包含一个中心点、两个长方形、一个斜面及三种颜色;所述一个斜面连接长方形的其中一个边缘;所述两个长方形及一个中心点的最上方设有颜色一;所述斜面设有颜色二;所有其他面设有颜色三;所述斜面的和多轴致动器的z轴之间的夹角是介乎0度和45度之间;根据所述斜面的面积变化,计算所述多轴致动器的rx方向转动角度βx,其方程式如下:
9.根据权利要求1所述的一种多轴致动器检测系统,其特征在于:所述的目标图案为三维图案,包含四个长方形、八个斜面及一个中心点;四个长方形分别从相机的图像读取区的四个边缘处延伸出所述相机的图像读取区,每个长方形的两个边缘连接两个斜面;所述中心点的中心与相机的图像读取区中心距离少于相机的图像读取区宽度的30%及高度的30%;根据八个斜面的面积变化,所述电子计算器计算出多轴致动器rx方向转动角度βx及ry方向转动角度βy,其方程式如下:
技术总结
一种多轴致动器检测系统,涉及到相机模组和马达的多轴致动器检测系统,解决现有的多轴致动器检测系统无法支持翻滚轴方向检测翻滚角度,检测成本高,测量精度低等技术不足,包含有:电子计算器、驱动板、目标图案及相机;驱动板连接多轴致动器,目标图案连接在多轴致动器的可动结构上,电子计算器分别连接驱动板和相机;相机采集记录目标图案运动变化图像信号,并发送给所述电子计算器,由电子计算器根据目标图案运动变化图像信号计算出多轴致动器的实际多轴运动量,并与输出的驱动控制信号对应的标准运动量比对,判断多轴致器是否合格。能支持包含翻滚方向的多轴运动量检测,能精准测量翻滚轴的运动量,并且只需一个相机,设备成本低,体积小。
技术研发人员:麦练智
受保护的技术使用者:高瞻创新科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!