非人灵长类动物非麻醉状态的笼内体重测定系统的制作方法
本发明涉及笼内体重测定,特别涉及一种非人灵长类动物非麻醉状态的笼内体重测定系统。
背景技术:
1、实验动物所处的进化阶段越高,对药物的反应、体内的生理病理过程也越接近人类,其中非人灵长类动物如猴、狒狒等最类似于人类,他们在和其它啮齿类、犬类等都在科学研究、新药开发中有不可替代的地位。实验动物的体重作为各类研究过程中最常规的测量数据之一,要求频率检测、准确检测且体重变化对药物和疾病等研究意义重大。测定非人灵长类动物的体重是实验动物从业人员的日常工作。
2、与啮齿类动物不同,非人灵长类动物生性好动,体型较大,且很多具有攻击性,通常啮齿类可以采用的称量方法无法适用于非人灵长类(cn201820750725、cn202121023011等)。为保证实验数据准确和实验人员安全,非人灵长类动物通常采用麻醉后称重、转移至称重笼中称重、实验员抓持后称重等方法进行体重测定,但麻醉后称重耗时长,对动物影响较大;转移至称重笼中称重和实验员抓持后称重方法耗时且对实验技术员力量要求高,对于体型动辄5kg以上且具有獠牙的大型雄性动物来说依然存在巨大安全隐患。
3、对于大体型的牛、猪等动物目前见cn200720173964、cn202220147731、cn202220498455等不适用于非人灵长类实验动物的高频率称量需求。
4、对于非人灵长类,目前见cn201822219481中所述解决方案一定程度上解决了上述问题,但精密的电子称量装置无法长期作为一般实验笼的底座,其依然需要人为的将动物转移至该装置中,耗时和安全性问题依然存在。
5、对于清醒状态下动物的称重解决方案中,cn201110149635所述方法能一定程度解决动物体重波动问题,但仍然无法满足科学研究过程对数据精度的频繁测定的需求。
技术实现思路
1、为解决上述技术问题,本发明提供一种非人灵长类动物非麻醉状态的笼内体重测定系统,包括:可移动称重单元、笼具单元和可移动多功能载物单元;
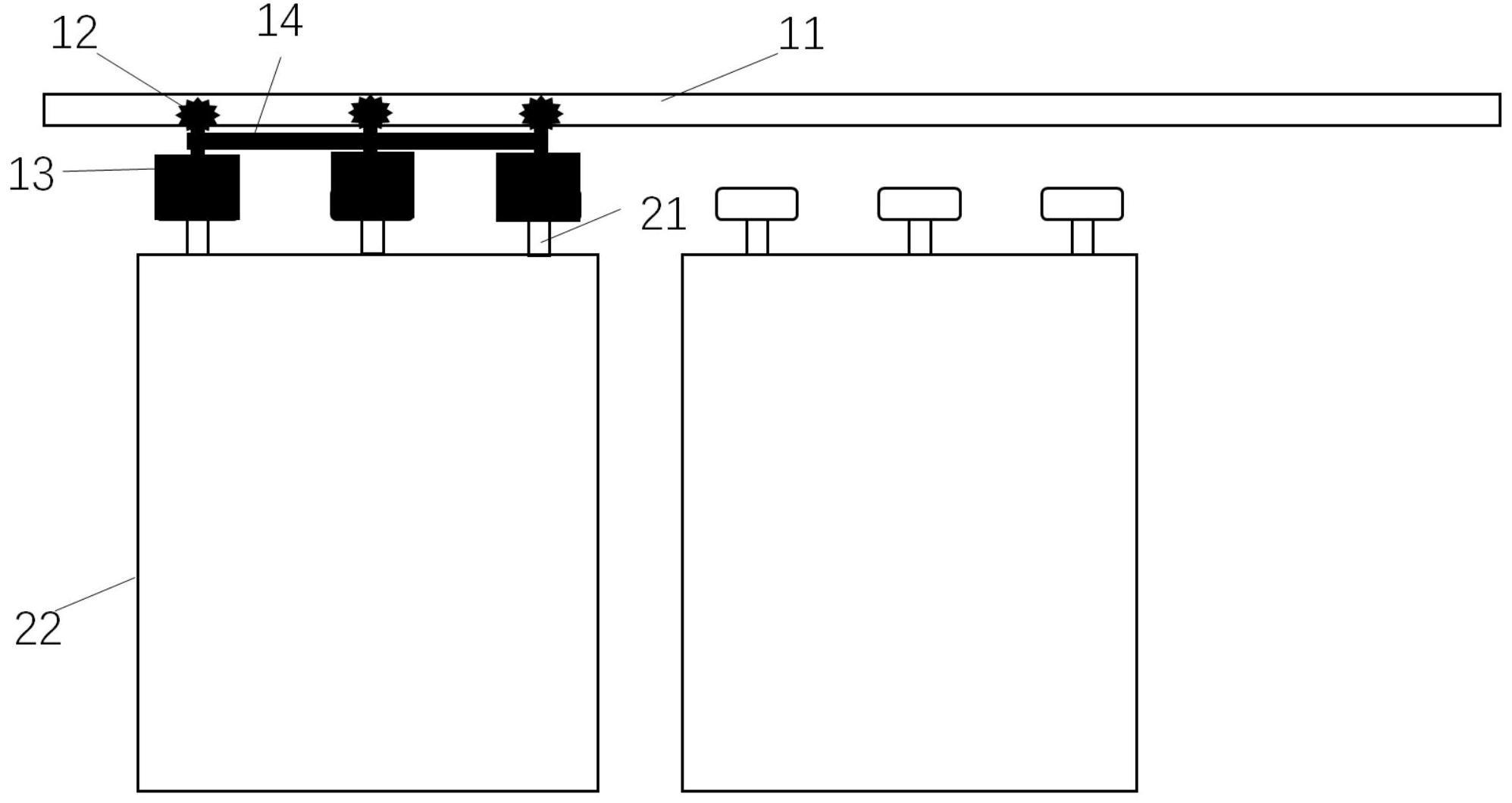
2、所述可移动称重单元包括:固定装在顶部的第一传动系统,可移动的固定在所述第一传动系统下方的多个挂载爪和固定连接在至少3个所述挂载爪的上方并与所述挂载爪组成的平面平行设置的称重单元主体;
3、所述笼具单元包括:标准笼具/非标准笼具、设在所述标准笼具/非标准笼具顶部的多个可与所述挂载爪相互嵌套的挂载点以及可移动的设在所述标准笼具/非标准笼具下方并可升降的托起所述标准笼具/非标准笼具的可升降平台;
4、所述可移动多功能载物单元包括:固定装在底部的第二传动系统,可移动的固定在所述第二传动系统上方的外壳、和由上至下依次被所述外壳包裹的影像采集点、零食存放点、投喂点以及可伸缩载物台及第二微处理器核心。
5、具体来说,所述第一传动系统包括:两条平行的第一齿轮传动带、固定在所述第一齿轮传动带两端并为所述第一传动系统提供动力的第一数控齿轮传动电机和多个移动悬挂在所述第一齿轮传动带上的第一传动轮。
6、具体来说,所述第一传动轮的下方一一对应的焊接所述挂载爪。
7、具体来说,所述称重单元主体焊接每条所述第一齿轮传动带上的至少1个所述挂载爪。
8、具体来说,所述称重单元主体是三角形或长方形。
9、具体来说,所述称重单元主体还包括位于中心的第一微处理器核心和位于周边的压力传感器。
10、具体来说,所述挂载点焊接在所述标准笼具/非标准笼具的顶部。
11、具体来说,所述挂载瓜水平移动使所述挂载点嵌入所述挂载瓜内,从而完成竖直方向的挂载,挂载完成后所述可升降平台缓慢下降一定距离,使所述标准笼具/非标准笼具的承重完全转移至所述可移动称重单元。
12、具体来说,所述可升降平台是机械数控的。
13、具体来说,所述第二传动系统包括:第二齿轮传动带、固定在所述第二齿轮传动带两端并为所述第二传动系统提供动力的第二数控齿轮传动电机和多个移动悬挂在所述第二齿轮传动带上的第二传动轮。
14、具体来说,所述第二传动轮焊接在所述外壳下方并带动所述外壳移动。
15、具体来说,所述外壳呈长方体或圆柱体,材质选自哈氏合金或不锈钢。
16、具体来说,所述载物台是可伸缩出所述外壳的,材质选自哈氏合金或不锈钢。
17、具体来说,所述影像采集点通过信号连接所述第二微处理器核心可用于捕捉所述非人灵长类动物在笼内的活动情况。
18、具体来说,所述零食存放点可存放零食,当所述非人灵长类动物需要进食时,可转移所述零食至所述投喂点以便于所述非人灵长类动物的进食。
19、具体来说,所述笼内体重测定系统还配有安装有体重记录系统的智能设备。
20、具体来说,所述智能设备与所述第一传动系统、所述称重单元主体、所述数控机械可升降平台、所述第二传动系统通过无线连接的方式实现数据互通和远程控制。
21、具体来说,所述智能设备是手机,个人电脑,平板电脑或其它电子设备。
22、本发明通过提供一种非人灵长类动物非麻醉状态笼内体重测定系统,能达到的有益效果如下:
23、1.称重单元主体的位置选择在笼具上方,有别于传统的下方称重的平台,减少了笼具冲洗过程中液体和污物易导致称重单元主体损坏的问题。这一设计还同时解决以往动物需要称重就得转移至专用的称重笼的问题,实现了动物在自己的日常生活笼中即可完成称重。
24、2.称重流程的自动化程度较高,主要通过可移动多功能载物单元利用非人灵长类动物的特性实现,食物吸引动物站上载物单元,实现两次读数差值计算动物体重的效果。
25、3.将单个动物的称重耗时缩减至每只30秒至1分钟内,保存下来的动物影像可用于回溯称重过程;提高实验室人员工作效率,减少动物操作过程中实验人员和实验动物的接触,减少动物应激。
26、4.利用动物进食过程相对少动的特性,解决了非人灵长类动物因好动性要准确称重时通常需要麻醉或人工固定动物的问题,避免了动物麻醉过程,以相对和谐的形式满足了在清醒状态下测定成年大体型非人灵长类体重的需求。
技术特征:
1.非人灵长类动物非麻醉状态的笼内体重测定系统,其特征在于,包括:可移动称重单元、笼具单元和可移动多功能载物单元;
2.根据权利要求1所述的笼内体重测定系统,其特征在于,所述第一传动系统包括:两条平行的第一齿轮传动带、固定在所述第一齿轮传动带两端并为所述第一传动系统提供动力的第一数控齿轮传动电机和多个移动悬挂在所述第一齿轮传动带上的第一传动轮。
3.根据权利要求2所述的笼内体重测定系统,其特征在于,所述第一传动轮的下方一一对应的焊接所述挂载爪。
4.根据权利要求2所述的笼内体重测定系统,其特征在于,所述称重单元主体焊接每条所述第一齿轮传动带上的至少1个所述挂载爪。
5.根据权利要求1所述的笼内体重测定系统,其特征在于,所述称重单元主体是三角形或长方形。
6.根据权利要求1所述的笼内体重测定系统,其特征在于,所述称重单元主体还包括位于中心的第一微处理器核心和位于周边的压力传感器。
7.根据权利要求1所述的笼内体重测定系统,其特征在于,所述挂载点焊接在所述标准笼具/非标准笼具的顶部。
8.根据权利要求1所述的笼内体重测定系统,其特征在于,所述挂载瓜水平移动使所述挂载点嵌入所述挂载瓜内,从而完成竖直方向的挂载,挂载完成后所述可升降平台缓慢下降一定距离,使所述标准笼具/非标准笼具的承重完全转移至所述可移动称重单元。
9.根据权利要求1所述的笼内体重测定系统,其特征在于,所述可升降平台是机械数控的。
10.根据权利要求1所述的笼内体重测定系统,其特征在于,所述第二传动系统包括:第二齿轮传动带、固定在所述第二齿轮传动带两端并为所述第二传动系统提供动力的第二数控齿轮传动电机和多个移动悬挂在所述第二齿轮传动带上的第二传动轮。
11.根据权利要求10所述的笼内体重测定系统,其特征在于,所述第二传动轮焊接在所述外壳下方并带动所述外壳移动。
12.根据权利要求1所述的笼内体重测定系统,其特征在于,所述外壳呈长方体或圆柱体,材质选自哈氏合金或不锈钢。
13.根据权利要求1所述的笼内体重测定系统,其特征在于,所述载物台是可伸缩出所述外壳的,材质选自哈氏合金或不锈钢。
14.根据权利要求1所述的笼内体重测定系统,其特征在于,所述影像采集点通过信号连接所述第二微处理器核心可用于捕捉所述非人灵长类动物在笼内的活动情况。
15.根据权利要求1所述的笼内体重测定系统,其特征在于,所述零食存放点可存放零食,当所述非人灵长类动物需要进食时,可转移所述零食至所述投喂点以便于所述非人灵长类动物的进食。
16.根据权利要求1所述的笼内体重测定系统,其特征在于,所述笼内体重测定系统还配有安装有体重记录系统的智能设备。
17.根据权利要求16所述的笼内体重测定系统,其特征在于,所述智能设备与所述第一传动系统、所述称重单元主体、所述可升降平台、所述第二传动系统通过无线连接的方式实现数据互通和远程控制。
18.根据权利要求16所述的笼内体重测定系统,其特征在于,所述智能设备是手机,个人电脑,平板电脑或其它电子设备。
技术总结
本发明提供了一种非人灵长类动物非麻醉状态的笼内体重测定系统,包括:可移动称重单元、笼具单元和可移动多功能载物单元。本发明的称重单元主体的位置选择在笼具上方,有别于传统的下方称重的平台,减少了笼具冲洗过程中液体和污物易导致称重单元主体损坏的问题。这一设计还同时解决以往动物需要称重就得转移至专用的称重笼的问题,实现了动物在自己的日常生活笼中即可完成称重。同时,本发明的称重流程自动化程度较高,单个动物的称重耗时缩减,提高实验室人员工作效率,避免了动物麻醉过程,以相对和谐的形式满足了在清醒状态下测定成年大体型非人灵长类体重的需求。
技术研发人员:唐爽捷,万红平
受保护的技术使用者:广东春盛生物科技发展有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!