一种基于陀螺仪和激光测距的惯性器件离心测量方法
本发明属于惯性传感器的测量测试,具体涉及一种基于陀螺仪和激光测距的惯性器件离心测量方法。
背景技术:
1、惯性导航系统是是以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度,将它对时间进行积分,且把它变换到导航坐标系中,从而得到在导航坐标系中的速度、偏航角和位置等信息的自主式导航系统。其工作环境不仅包括空中、地面,还可以在水下。其中加速度计是惯性导航系统的核心之一,用于敏感比力,从而获得速度、位置的变化量。挠性加速度计是目前国内惯性导航系统应用最为广泛的一种加速度计,它的基本工作原理是,挠性摆片敏感外界加速度产生微小角位移,通过差动电容检测此时的电容变化量,经放大输入至电磁力矩器线圈中,产生反馈力矩使摆片回到平衡位置,对此时的线圈电流进行检测得到与输入加速度成比例的输出信号。
2、惯性导航系统中,惯性器件的精度校正具有重要的意义。如us2873426a公开了一种加速度计校准系统,包括在高速下测试校准待测加速度计的振动器,在振动器构件的端部上安装被测加速度计,以及电连接到振动器构件的测试以及电源装置,通过以上振动结构来实现加速度计的校准。us9459277b2公开了一种校准3轴加速计的系统和方法,包括加速度传感器和速度传感器,使用速度传感器来接收速度信息,使用速度信息沿至少一条所测部件的加速度信息,使用加速度传感器接收加速度信息,并且使用所述加速度信息、加速度传感器加速度样本和平均垂直向量采样来将所测部件中的至少之一校准到加速度传感器轴。
3、但是在实际应用中,加速度计的输出并不是线性的,除零偏与一次项构成的线性部分外,还包括高阶非线性项、交叉耦合项等误差项。这些误差的系数量级很小,一般在10-6量级,重力场下的测试难以将其与加速度计线性部分或是输出噪声进行区分,目前缺乏对这部分误差进行精准标定的测试装置或方法。且高阶非线性误差会随着输入加速度增大而指数增加,对高精度应用而言这是一项巨大的误差。
4、精密离心机是一种通过高速旋转提供高精度向心加速度的设备,主要用于惯性器件的高动态测试。通过精密离心机提供高输入加速度能对非线性误差进行分离,对于提高应用的精度具有重要意义。从精密离心测试的基本原理来看,角速度与有效半径是影响向心加速度精度的重要因素,若待测物体为一只挠性加速度计,则作用于其上的输入加速度矢量还应包括重力加速度矢量,此时在加速度计输入轴方向的分量即为加速度计实际所敏感的加速度。
5、考虑精密离心机存在角速度与有效半径误差,其中角速度存在周期性变化,为离心机自身工作时引入;有效半径误差则有不同来源,其中常见的是因载荷与台面自重引起的台面倾斜或弯曲,以及离心机工作中动态离心载荷引起的拉伸。离心机自身提供的角速率基准是通过平均角速率得到的,无法准确反映实际运转中的瞬时角速率,同时在一个完整的离心测试序列中,其线性度也无法得到保证;有效半径误差则会引入与输入加速度大小有关的奇异二次项,这将影响加速度计非线性误差的标定精度。
6、因而,在挠性加速度计的精密离心测试中,角速度误差与有效半径误差都将影响离心机实际输出的向心加速度大小,在以离心机为基准的条件下将引起待测加速度计的测量误差,最终导致非线性误差系数的标定结果难以达到理想精度。
技术实现思路
1、针对目前现有技术中存在的问题,本发明提出一种基于陀螺仪和激光测距的惯性器件离心测量方法,可以用于高精度加速度计输出非线性误差的标定。本发明以随加速度计共同进行离心测试的陀螺仪所得到的瞬时角速率信息为基准,结合激光测距获得的实时有效半径变化,提供准确的向心加速度输出,可有效降低精密离心机自身角速度误差与有效半径误差对输出向心加速度的影响,提升待测加速度计实际所敏感加速度的精度,对于不同种类的陀螺仪与加速度计均可普遍适用。
2、本发明完整的技术方案包括:
3、一种基于陀螺仪和激光测距的惯性器件离心测量方法,包括如下步骤:
4、步骤(1):在离心机上安装待测惯性器件、陀螺仪和激光测距仪,所述待测惯性器件的输入轴方向与离心机台面平行并指向离心机主轴;
5、步骤(2):启动激光测距仪并获取此时待测惯性器件的静态有效半径,随后得到在该静态有效半径下,待测惯性器件敏感预设加速度时所需要的转速;
6、步骤(3):根据测量需求确定输出转速序列,所述输出转速序列包括最大输出转速,以及大于零且小于最大输出转速的多个其他输出转速,每个输出转速对应一个采样点,形成采样序列;
7、步骤(4):按照所述采样序列启动离心机进行离心试验,在输出转速序列中的每个转速下由激光测距仪采集待测惯性器件的实时有效半径数据、陀螺仪采集瞬时角速率数据、并得到待测惯性器件的输出数据,在离心机完成一次转速从0至最大值再回到0的过程后,停止离心机,记录激光测距仪、陀螺仪与待测惯性器件采集的数据,完成一组试验,重复进行3~6组试验;
8、步骤(5):反向安装待测惯性器件,重复步骤(2)至步骤(4)进行3~6组反向试验;
9、步骤(6):完成正反向试验后,利用获得的实时有效半径数据、瞬时角速率数据,根据向心加速度公式ω2r=a计算得到基准值,式中ω为瞬时角速率,r为实时有效半径,a为基准值,并与根据待测惯性器件输出数据得到的实测值相对比,得到待测惯性器件输出的线性度,完成高阶非线性误差的标定。
10、进一步的,所述陀螺仪利用单轴陀螺对瞬时角速率进行测量。
11、进一步的,所述陀螺仪利用多轴陀螺共同对瞬时角速率进行测量。
12、进一步的,所述激光测距仪为水平激光测距仪。
13、进一步的,所述水平激光测距仪为两个,并对称安装于离心机台面上的两组待测惯性器件处。
14、进一步的,水平激光测距仪为一个,并安装于离心机台面的离心机主轴处。
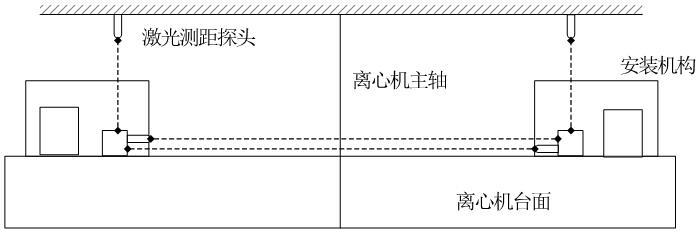
15、进一步的,所述激光测距仪还包括位于待测惯性器件上方的竖直激光测距仪。
16、进一步的,结合水平激光测距仪和竖直激光测距仪的测量结果,得到待测惯性器件的实时有效半径。
17、进一步的,所述预设加速度为1-100个重力加速度。
18、本发明相对于现有技术的优点在于:利用陀螺仪对瞬时角速率的测量取代离心机作为角速度基准,在获得任意时刻角速率大小的同时,解决了离心机转速均匀性的问题,能够避免输出转速序列线性度存在的误差。利用激光测距获得的实时有效半径变化能够提高加速度计所敏感向心加速度的精度,为后续高阶非线性误差系数标定精度的提高提供基础。
技术特征:
1.一种基于陀螺仪和激光测距的惯性器件离心测量方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于陀螺仪和激光测距的惯性器件离心测量方法,其特征在于,所述陀螺仪利用单轴陀螺对瞬时角速率进行测量。
3.根据权利要求1所述的一种基于陀螺仪和激光测距的惯性器件离心测量方法,其特征在于,所述陀螺仪利用多轴陀螺共同对瞬时角速率进行测量。
4.根据权利要求1所述的一种基于陀螺仪和激光测距的惯性器件离心测量方法,其特征在于,所述激光测距仪为水平激光测距仪。
5.根据权利要求4所述的一种基于陀螺仪和激光测距的惯性器件离心测量方法,其特征在于,所述水平激光测距仪为两个,并对称安装于离心机台面上的两组待测惯性器件处。
6.根据权利要求4所述的一种基于陀螺仪和激光测距的惯性器件离心测量方法,其特征在于,水平激光测距仪为一个,并安装于离心机台面的离心机主轴处。
7.根据权利要求5或6所述的一种基于陀螺仪和激光测距的惯性器件离心测量方法,其特征在于,所述激光测距仪还包括位于待测惯性器件上方的竖直激光测距仪。
8.根据权利要求7所述的一种基于陀螺仪和激光测距的惯性器件离心测量方法,其特征在于,根据水平激光测距仪和竖直激光测距仪的测量结果,得到待测惯性器件的实时有效半径。
9.根据权利要求1所述的一种基于陀螺仪和激光测距的惯性器件离心测量方法,其特征在于,所述预设加速度为1-100个重力加速度。
技术总结
本发明属于惯性导航系统的惯性传感器测量技术领域,具体涉及一种基于陀螺仪和激光测距的惯性器件离心测量方法,包括在离心机上安装待测惯性器件、陀螺仪和激光测距仪,在多个转速下进行离心试验,利用激光测距仪采集的有效半径数据、陀螺仪采集瞬时角速率数据、以及惯性器件的向心加速度数据进行计算得到惯性器件输出的线性度,完成高阶非线性误差的标定,本方法解决了离心机转速均匀性的问题,能够避免输出转速序列线性度存在的误差,利用激光测距获得的实时有效半径变化能够提高惯性器件所敏感向心加速度的精度,为后续高阶非线性误差系数标定精度的提高提供了支持。
技术研发人员:冉龙俊,张春熹,宋来亮,高爽,肖听雨,黄婉莹
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!