一种单光子激光主动成像探测雷达的制作方法
本发明属于雷达成像,尤其涉及一种单光子激光主动成像探测雷达。
背景技术:
1、随着基础软硬件技术的不断发展,以盖革焦平面相机为基础的单光子激光非扫描主动成像探测技术越来越受到人们的关注,并推出了较多的研究成果,使激光雷达在作用距离、成像效果、成像速度等方面都有了较大的提升,具有较高的应用价值。
2、现有单光子探测器死时间较长,严重限制了其探测效率。以一套探测范围为0~150km的单光子激光雷达为例,系统在发射一发激光脉冲信号后的1ms时间内,目标反射的激光回波信号可能随时到达,这就要求单光子探测器必须在这1ms的时间段中时刻处于时刻待命状态。然而盖革焦平面相机工作于门控状态,且探测器机死时间较长,无法实现实时准备探测目标反射的光子回波信号。以现有的某款盖革焦平面相机为例,其最大工作频率为25khz,最长有效探测时间为4us,即在最短40us的帧周期中,只有1/10的时间可以正常接收信号,其余时间都为死时间,无法接收光子回波信号,因此也无法满足前述在1ms的时间内实时待命的需求。
技术实现思路
1、本发明的目的在于:为了克服现有技术问题,公开了一种单光子激光主动成像探测雷达,本发明将测距系统与单光子成像探测系统有机结合,实现测距引导成像,提高成像探测效率,重点解决了盖革焦平面相机死时间较长,有效工作时间较短,无法做到实时待命接收目标反射的光子回波信号的问题。
2、本发明目的通过下述技术方案来实现:
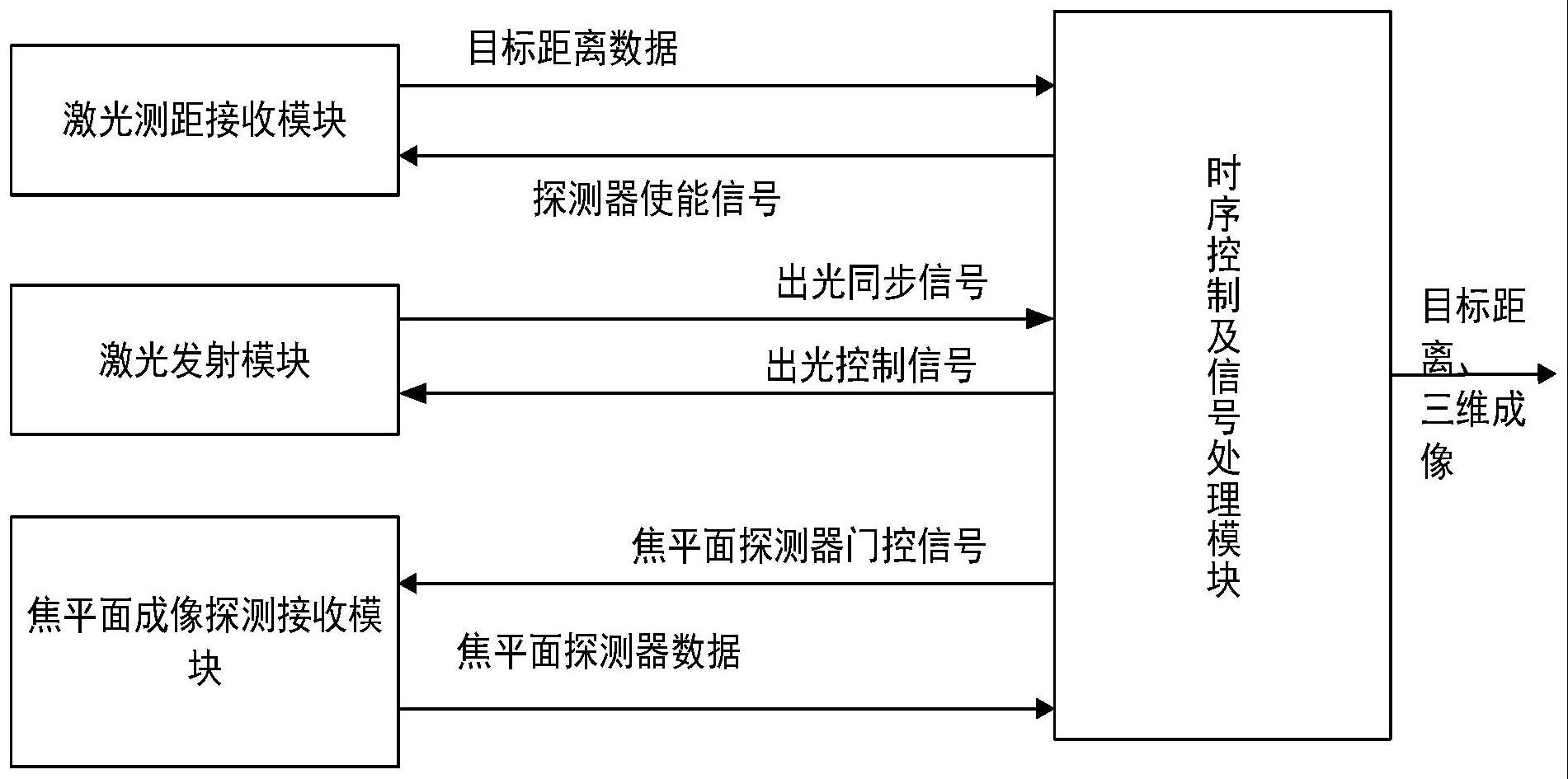
3、一种单光子激光主动成像探测雷达,所述单光子激光主动成像探测雷达包括激光发射模块、激光测距接收模块、焦平面成像探测接收模块、时序控制及信号处理模块;其中,所述激光发射模块基于时序控制及信号处理模块的控制信号向目标发射周期性脉冲激光;所述激光测距接收模块基于时序控制及信号处理模块的使能信号,接受目标反射的激光回波信号,并在接收激光回波信号同时反馈包含目标距离信息的目标距离数据至时序控制及信号处理模块,由所述时序控制及信号处理模块完成目标距离计算;所述焦平面成像探测接收模块基于时序控制及信号处理模块的门控信号,使得所述焦平面成像探测接收模块在目标回波信号到达时刻处于有效工作时间,完成回波信号的接收及处理;并将处理后获得的焦平面成像探测数据输出至时序控制及信号处理模块,由所述时序控制及信号处理模块进行相应数据处理,完成目标的三维成像。
4、根据一个优选的实施方式,所述激光发射模块发射激光脉冲的同时,产生出光同步信号输入至时序控制及信号处理模块中,作为激光测距计时的起点。
5、根据一个优选的实施方式,作为替代的,所述激光发射模块以固定的频率发射激光脉冲,并输出出光同步信号至时序控制及信号处理模块。
6、根据一个优选的实施方式,所述时序控制及信号处理模块在接收到出光同步信号,并延时预设时间后,向激光测距接收模块输出使能信号,控制激光测距接收模块开始工作,接收目标反射的激光回波信号。
7、根据一个优选的实施方式,所述时序控制及信号处理模块基于激光测距即是的起点信息以及激光测距接收模块反馈的目标距离数据,获取目标反射的激光脉冲信号的脉冲飞行时间dt,再利用l=0.5*c*dt计算得到目标距离,其中c为光速,l为目标距离。
8、根据一个优选的实施方式,所述时序控制及信号处理模块在接收到激光发射模块输出的出光同步信号后,延时预设时间,再向焦平面成像探测接收模块输出一个门控信号,控制焦平面成像探测接收模块在目标回波信号到达时刻处于有效工作时间;其中,延时时间为基于测得的目标距离确定。
9、根据一个优选的实施方式,所述焦平面成像探测接收模块在接收到焦平面探测器门控信号后,探测器开始进入工作状态,并在经过有效工作时间后,自动进入死时间;同时将工作期间的获得的焦平面成像探测数据输出给时序控制及信号处理模块,此时的焦平面成像探测数据中即包含了目标的三维轮廓信息。
10、根据一个优选的实施方式,所述时序控制及信号处理模块对焦平面成像探测数据经相应的图像处理算法处理后,获得目标的三维成像信息,实现对目标的三维成像。
11、根据一个优选的实施方式,所述激光发射模块、激光测距接收模块、焦平面成像探测接收模块三个模块为共轴设置。
12、根据一个优选的实施方式,所述激光测距接收模块、焦平面成像探测接收模块采用共口径设置或者分口径设置。
13、前述本发明主方案及其各进一步选择方案可以自由组合以形成多个方案,均为本发明可采用并要求保护的方案。本领域技术人员在了解本发明方案后根据现有技术和公知常识可明了有多种组合,均为本发明所要保护的技术方案,在此不做穷举。
14、本发明的有益效果:通过本发明单光子激光主动成像探测雷达的结构设置,实现了激光测距和激光成像一体化设计,弥补了现有单光子探测器死时间较长,有效工作时间短的不足。同时,不需要目标距离的先验信息,避免了复杂的距离选通推扫过程,提高了成像探测效率,特别适合对高速运动目标的成像探测。
技术特征:
1.一种单光子激光主动成像探测雷达,其特征在于,所述单光子激光主动成像探测雷达包括激光发射模块、激光测距接收模块、焦平面成像探测接收模块、时序控制及信号处理模块;
2.如权利要求1所述的单光子激光主动成像探测雷达,其特征在于,所述激光发射模块发射激光脉冲的同时,产生出光同步信号输入至时序控制及信号处理模块中,作为激光测距计时的起点。
3.如权利要求1所述的单光子激光主动成像探测雷达,其特征在于,作为替代的,所述激光发射模块以固定的频率发射激光脉冲,并输出出光同步信号至时序控制及信号处理模块。
4.如权利要求2或3所述的单光子激光主动成像探测雷达,其特征在于,所述时序控制及信号处理模块在接收到出光同步信号,并延时预设时间后,向激光测距接收模块输出使能信号,控制激光测距接收模块开始工作,接收目标反射的激光回波信号。
5.如权利要求4所述的单光子激光主动成像探测雷达,其特征在于,所述时序控制及信号处理模块基于激光测距即是的起点信息以及激光测距接收模块反馈的目标距离数据,获取目标反射的激光脉冲信号的脉冲飞行时间dt,再利用l=0.5*c*dt计算得到目标距离,其中c为光速,l为目标距离。
6.如权利要求1所述的单光子激光主动成像探测雷达,其特征在于,所述时序控制及信号处理模块在接收到激光发射模块输出的出光同步信号后,延时预设时间,再向焦平面成像探测接收模块输出一个门控信号,控制焦平面成像探测接收模块在目标回波信号到达时刻处于有效工作时间;其中,延时的预设时间为基于测得的目标距离确定。
7.如权利要求6所述的单光子激光主动成像探测雷达,其特征在于,所述焦平面成像探测接收模块在接收到焦平面探测器门控信号后,探测器开始进入工作状态,并在经过有效工作时间后,自动进入死时间;
8.如权利要求7所述的单光子激光主动成像探测雷达,其特征在于,所述时序控制及信号处理模块对焦平面成像探测数据经相应的图像处理算法处理后,获得目标的三维成像信息,实现对目标的三维成像。
9.如权利要求1所述的单光子激光主动成像探测雷达,其特征在于,所述激光发射模块、激光测距接收模块、焦平面成像探测接收模块三个模块为共轴设置。
10.如权利要求1所述的单光子激光主动成像探测雷达,其特征在于,所述激光测距接收模块、焦平面成像探测接收模块采用共口径设置或者分口径设置。
技术总结
本发明公开了一种单光子激光主动成像探测雷达,包括激光发射模块、激光测距接收模块、焦平面成像探测接收模块、时序控制及信号处理模块;激光测距接收模块接受目标反射的激光回波信号,并在接收激光回波信号同时反馈包含目标距离信息的目标距离数据至时序控制及信号处理模块,由时序控制及信号处理模块完成目标距离计算;焦平面成像探测接收模块基于时序控制及信号处理模块的门控信号,使得焦平面成像探测接收模块在目标回波信号到达时刻处于有效工作时间,完成回波信号的接收及处理;并将处理后获得的焦平面成像探测数据输出至时序控制及信号处理模块,由时序控制及信号处理模块进行相应数据处理,完成目标的三维成像。
技术研发人员:任瑞,祝月兵,冯波,叶鹏,刘志辉
受保护的技术使用者:四川九洲电器集团有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!