一种去除伪点的无源多站多目标交叉定位方法
本发明属于电子对抗,具体涉及一种去除伪点的无源多站多目标交叉定位方法。
背景技术:
1、电子对抗在现代战争中的地位和作用不断增强,辐射源定位是电子对抗的一个重要课题。虽然主动定位技术具有全天候和高精度的优势,但它也很容易被敌人探测到,从而遭受敌方电子干扰的软杀伤或诸如反辐射导弹等硬杀伤武器的攻击,对定位精度造成极大影响,甚至威胁定位系统自身的安全。
2、无源定位是一种被动探测侦察定位,它本身不发射信号,只接收来自外部辐射的信号,因此具有极强的隐蔽性。其可以从接收到的信号中获得计算目标位置信息的相关参数,进而实现目标定位。在无源定位中,测向交叉定位由于设备简单、方位信息可靠、探测距离长、系统灵敏度高而得到了广泛的应用。然而,在多目标定位场景中,多传感器使用多目标的方位角测量值进行交叉定位时会产生大量的伪点。
技术实现思路
1、为了解决现有技术中存在的上述问题,本发明提供了一种去除伪点的无源多站多目标交叉定位方法。本发明要解决的技术问题通过以下技术方案实现:
2、本发明提供了一种去除伪点的无源多站多目标交叉定位方法,包括:
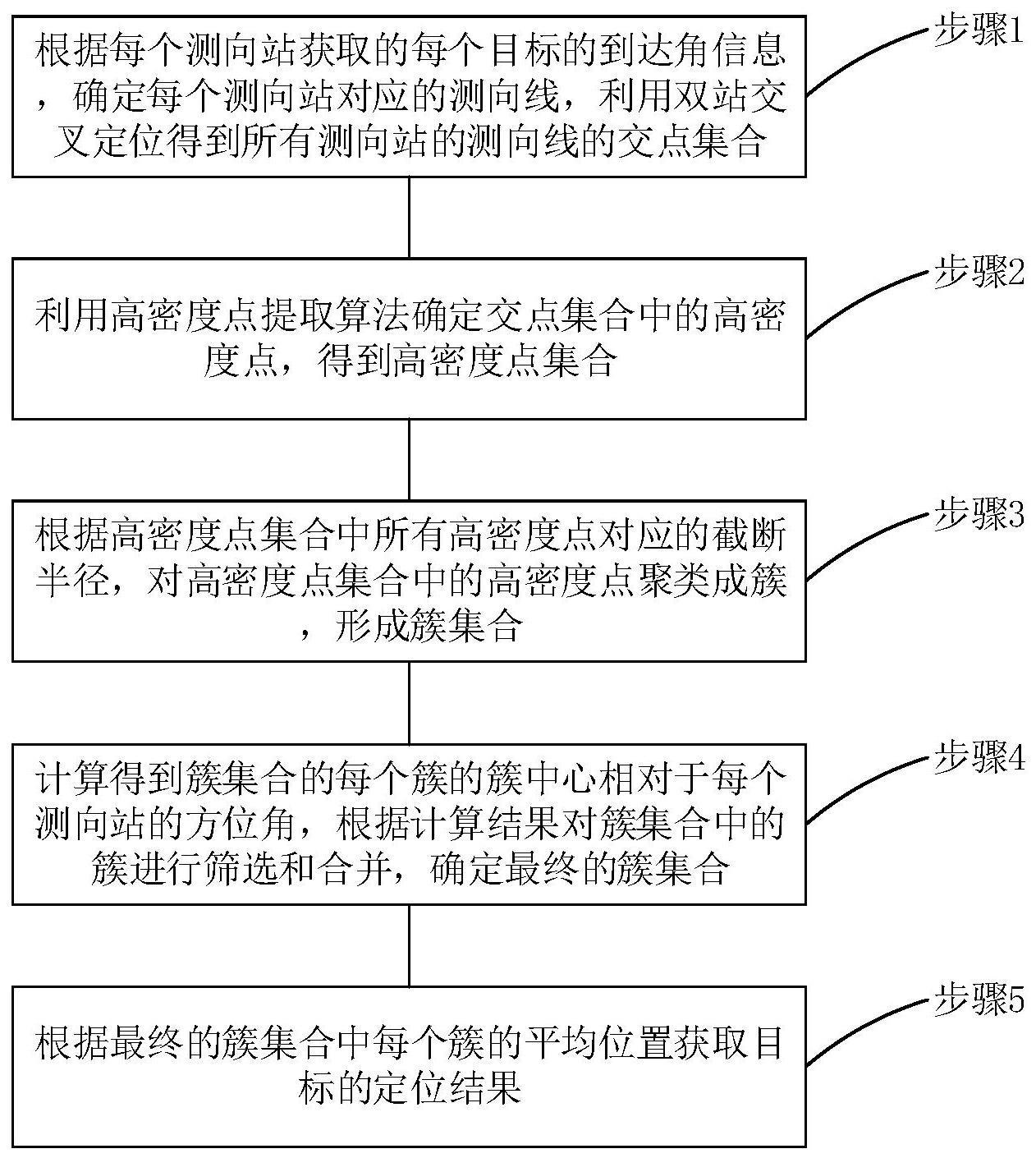
3、步骤1:根据每个测向站获取的每个目标的到达角信息,确定每个测向站对应的测向线,利用双站交叉定位得到所有测向站的测向线的交点集合;
4、步骤2:利用高密度点提取算法确定所述交点集合中的高密度点,得到高密度点集合;
5、步骤3:根据所述高密度点集合中所有高密度点对应的截断半径,对所述高密度点集合中的高密度点聚类成簇,形成簇集合;
6、步骤4:计算得到所述簇集合的每个簇的簇中心相对于每个测向站的方位角,根据计算结果对所述簇集合中的簇进行筛选和合并,确定最终的簇集合;
7、步骤5:根据最终的簇集合中每个簇的平均位置获取目标的定位结果。
8、在本发明的一个实施例中,所述步骤2包括:
9、步骤2.1:初始化高密度点提取算法的参数,所述参数包括截断半径dc,截断半径自增步长step,截断半径的上阈值maxdc,局部密度的下阈值minpts,其中,截断半径dc的初始值为零;
10、步骤2.2:根据dc=dc+step,对截断半径dc进行更新,判断当前的截断半径dc是否满足dc≤maxdc,如果满足则执行步骤2.3,否则结束高密度点提取算法,执行步骤3;
11、步骤2.3:计算当前的交点集合中各交点之间的欧式距离,得到欧式距离的二维矩阵dis;
12、步骤2.4:根据所述二维矩阵dis和当前的截断半径dc,计算得到每个交点的局部密度,并确定所有交点的局部密度的最大值maxpts,判断局部密度的最大值maxpts是否满足maxpts≥minpts,如果满足则执行步骤2.5,否则返回至步骤2.2;
13、步骤2.5:根据所述二维矩阵dis,计算每个交点的相对距离,根据每个交点的相对距离,计算得到每个交点的基尼系数,将基尼系数最大的交点作为高密度点加入高密度点集合,同时记录该高密度点对应的截断半径dc,之后更新交点集合后返回步骤2.2。
14、在本发明的一个实施例中,在所述步骤2.4中,每个交点的局部密度按照下式计算得到:
15、ρi=∑j≠ix(disij-dc);
16、
17、式中,ρi表示第i个交点的局部密度,disij表示交点集合中第i个交点和第j个交点之间的欧式距离,dc表示截断半径。
18、在本发明的一个实施例中,在所述步骤2.5中,每个交点的相对距离按照下式计算得到:
19、
20、式中,rdi表示第i个交点的相对距离,ii表示局部密度比第i个交点大的交点集合,表示空集。
21、在本发明的一个实施例中,在所述步骤2.5中,每个交点的基尼系数按照下式计算得到:
22、pi=ρi*rdi;
23、式中,pi表示第i个交点的基尼系数。
24、在本发明的一个实施例中,所述步骤3包括:
25、步骤3.1:将所述高密度点集合中的所有高密度点的初始状态记为未聚类,并将所有高密度点按照截断半径由大到小降序排列;
26、步骤3.2:按顺序遍历排序后的高密度点集合中的每个高密度点,若该高密度点的状态为未聚类则并将其状态换为已聚类,判断排序后的高密度点集合中其他未聚类的高密度点与当前遍历的高密度点的欧氏距离,是否在当前遍历的高密度点的截断半径的范围内,若是,则将该未聚类的高密度点的状态换为已聚类,并与当前遍历的高密度点聚类形成簇,对所述高密度点集合遍历完成后得到簇集合。
27、在本发明的一个实施例中,所述步骤4包括:
28、步骤4.1:计算所述簇集合中每个簇的所有点的坐标平均值,得到该簇的簇中心;
29、步骤4.2:计算得到每个簇的簇中心相对于每个测向站的方位角;
30、步骤4.3:对所述簇中心相对于每个测向站的方位角与每个测向站对于每个目标的初始测量值,进行误差计算,得到方位角误差;
31、步骤4.4:根据所述方位角误差,将不符合3σ检验原则的簇剔除,将属于同一组测量数据的簇合并,得到最终的簇集合。
32、与现有技术相比,本发明的有益效果在于:
33、本发明的去除伪点的无源多站多目标交叉定位方法,根据真实目标点附近密度明显高于虚假点的这一特性,在尽量保持精度和虚假点去除性能的同时,有效降低了后续聚类的计算复杂度。本发明方法简单有效,仅通过多站测量的角度信息及自身位置即可完成对目标的定位。
34、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
技术特征:
1.一种去除伪点的无源多站多目标交叉定位方法,其特征在于,包括:
2.根据权利要求1所述的去除伪点的无源多站多目标交叉定位方法,其特征在于,所述步骤2包括:
3.根据权利要求2所述的去除伪点的无源多站多目标交叉定位方法,其特征在于,在所述步骤2.4中,每个交点的局部密度按照下式计算得到:
4.根据权利要求3所述的去除伪点的无源多站多目标交叉定位方法,其特征在于,在所述步骤2.5中,每个交点的相对距离按照下式计算得到:
5.根据权利要求4所述的去除伪点的无源多站多目标交叉定位方法,其特征在于,在所述步骤2.5中,每个交点的基尼系数按照下式计算得到:
6.根据权利要求1所述的去除伪点的无源多站多目标交叉定位方法,其特征在于,所述步骤3包括:
7.根据权利要求1所述的去除伪点的无源多站多目标交叉定位方法,其特征在于,所述步骤4包括:
技术总结
本发明涉及一种去除伪点的无源多站多目标交叉定位方法,包括:根据每个测向站获取的每个目标的到达角信息,确定每个测向站对应的测向线,利用双站交叉定位得到所有测向站的测向线的交点集合;利用高密度点提取算法确定交点集合中的高密度点,得到高密度点集合;根据高密度点集合中所有高密度点对应的截断半径,对高密度点集合中的高密度点聚类成簇,形成簇集合;计算得到簇集合的每个簇的簇中心相对于每个测向站的方位角,根据计算结果对簇集合中的簇进行筛选和合并,确定最终的簇集合;根据最终的簇集合中每个簇的平均位置获取目标的定位结果。本发明简单有效,仅通过多站测量的角度信息及自身位置即可完成对目标的定位。
技术研发人员:朱丽娜,侯轩,魏雅琦
受保护的技术使用者:西安电子科技大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!