一种基于Funnel区域的毫米波雷达有效目标物识别控制策略的制作方法
本发明主要涉及自动驾驶中数据处理相关,具体是一种基于funnel区域的毫米波雷达有效目标物识别控制策略。
背景技术:
1、随着新能源汽车的智能化发展,辅助驾驶与自动驾驶功能的需求也在不断提升。作为当前重要的环境感知设备之一,毫米波雷达的应用越来越广泛。目前不同厂家的雷达对于扫描区域的目标物数据输出方式也是不同多样的,比如德尔福的esr雷达在以目标物id为索引的数据集成方式,大陆ars408雷达的周期内多目标物按照状态类别方式进行信息播报。目前车用毫米波雷达多是以散点的方式将检测区域内的目标物进行检测与发送,但是对于不同应用场景、不同功能需求(aeb/acc/ldw等)需要基于雷达的检测数据进行一系列的动态数据提取与处理,用以支持这些功能的实现。因此,一种通用的雷达有效目标物数据的识别方法是必须的。
技术实现思路
1、为解决目前技术的不足,本发明结合现有技术,从实际应用出发,提供一种基于funnel区域的毫米波雷达有效目标物识别控制策略,本发明为一种高效且面向不同应用功能均可移植的有效目标物识别控制方法,属于新能源汽车自动驾驶与辅助驾驶控制领域。
2、本发明的技术方案如下:
3、一种基于funnel区域的毫米波雷达有效目标物识别控制策略,包括,
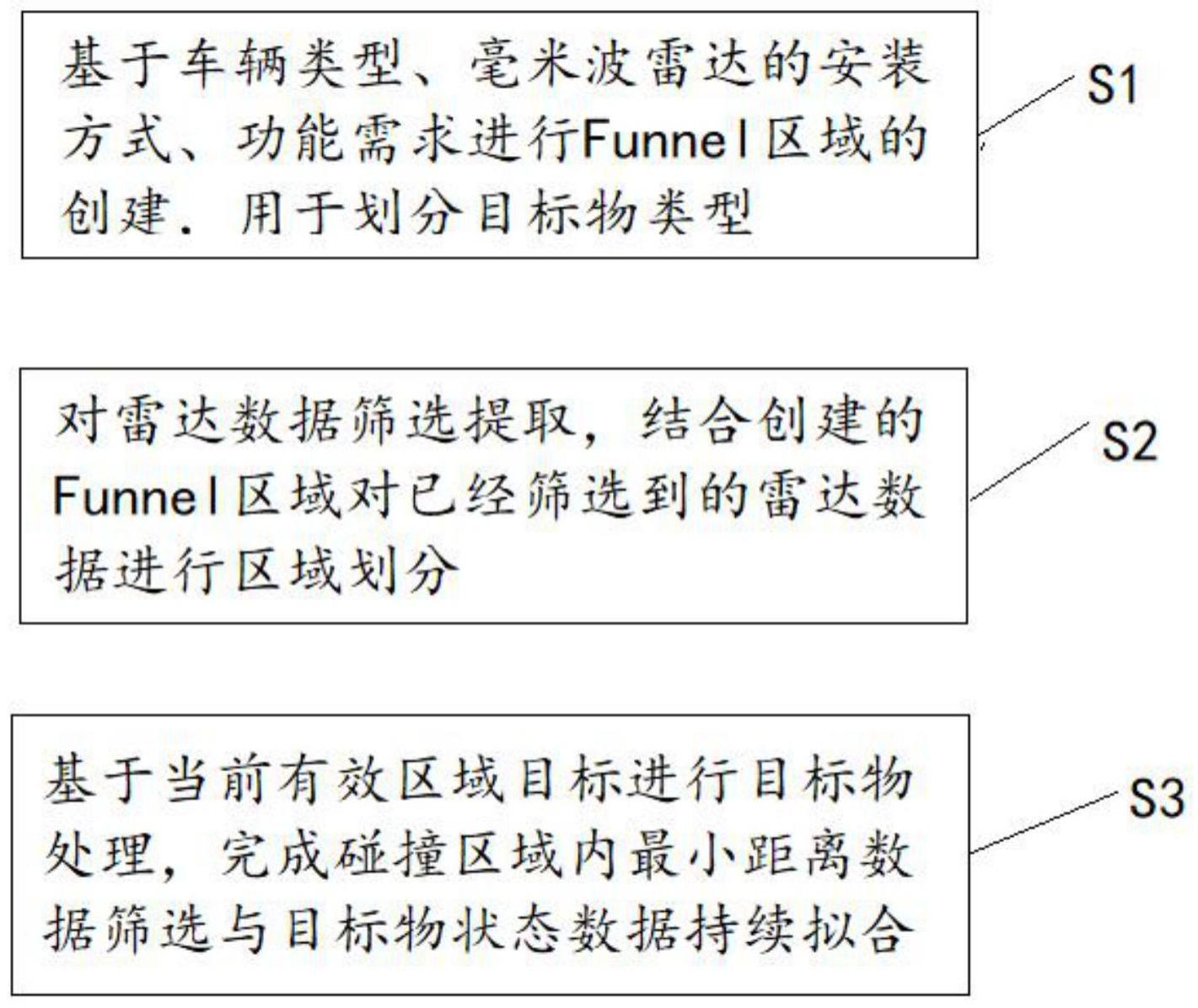
4、步骤s1、基于车辆类型、毫米波雷达的安装方式、功能需求进行funnel区域的创建,用于划分目标物类型;
5、步骤s2、对雷达数据筛选提取,结合创建的funnel区域对已经筛选到的雷达数据进行区域划分;
6、步骤s3、基于当前有效区域目标进行目标物处理,完成碰撞区域内最小距离数据筛选与目标物状态数据持续拟合。
7、进一步,步骤s1中,设定七块funnel区域,分别包括中间区域inner、中间左缓冲区域inner left、中间右缓冲区域inner right、左邻道区域wider left、右邻道区域widerright、左外车道区域outer left、右外车道区域outer right;
8、中间区域inner为车辆行驶正前方区域,中间左缓冲区域inner left、中间右缓冲区域inner right用于中间区域的切入切出缓冲判断,左邻道区域wider left、左外车道区域outer left用于左侧变道区域、右邻道区域wider right、右外车道区域outer right用于右侧变道区域。
9、进一步,步骤s1中,funnel区域创建方法如下:
10、根据车辆宽度l0、雷达安装偏执距离l1设置中间区域inner的宽度为l0+l1;中间左缓冲区域inner left、中间右缓冲区域inner right的宽度l2设置inner区域的0.8倍,即l2=0.8*(l0+l1);左邻道区域wider left、右邻道区域wider right主要用于相邻车道的车辆切入与切出,区域设置为标准道路宽度3.5米与雷达偏执距离l1之和,即左邻道区域widerleft、右邻道区域wider right宽度为l3=3.5+l1。
11、进一步,步骤s2中,雷达数据筛选提取所处理数据包括目标物方位角、目标物横向与纵向速度、相对速度、相对加速度、目标物可信度。
12、进一步,步骤s2中,以目标物方位角为索引把所有当前雷达检测到的目标物基于创建的funnel区域进行划分。
13、进一步,步骤s2中,具体包括如下步骤,
14、s21、在程序中申请7个缓存数组:雷达初始数据缓存数组esr_buffer,数组容量为8*64,数据类型single;过程提取数组ibuffertemp,数组容量为8*2,数据类型single;初次提取数组olddatai,数组容量为8*1,数据类型single;转存提取数组newdatai,数组容量为8*1,数据类型single;目标状态数组objlist数组容量为8*64,数据类型single;目标状态跟踪数组objlistflag,数组容量为2*1,数据类型u8,第一列代表目标状态是否写入完成,第二列代表是否读取完成;当前碰撞区目标数组finalbuffer,数组容量为8*1,数据类型single;
15、步骤s22、程序主逻辑采用基准周期的前提下,用一个for循环直接快速读取所有雷达目标物信息存储至缓存esr_buffer,然后后面用10ms周期性的程序逻辑读取这个缓存;
16、步骤s23、周期性的遍历esr_buffer数组,将数据id、方位角、横向速度、数据成熟度进行筛选,输出的结果放置至objlist,所有的数据均按照以下格式进行排列:目标物id、目标方位角、划分的funnel区域位置1-7,其中0代表初始值,没有目标物信息,1-7分别表征funnel区域从左至右区域,每次读取完重置objlistflag的数据读取与写入状态,其中0代表默认没有完成,1代表完成读写;
17、步骤s24、根据objlist中的横向速度进行二次筛选,区分切入cut in与切出cutout,根据成熟度进行目标物的删除与增加至最终列表;
18、步骤s25、根据最终的objlist数据进行周期性的数据转存,通过olddatai与newdatai数组进行循环覆盖,在覆盖过程中根据数据信息中的纵向距离进行提取,选取最小距离的数据写入最终的finalbuffer。
19、进一步,步骤s3中,目标物状态数据持续拟合是对距离信息做升/降平滑处理。
20、本发明的有益效果:
21、本发明可实现不同厂家的雷达在发出目标物信息数据后进行高效的有效目标物提取,为实现不同功能的辅助驾驶、自动驾驶需求提供直接、准确的目标物数据。
技术特征:
1.一种基于funnel区域的毫米波雷达有效目标物识别控制策略,其特征在于,包括,
2.根据权利要求1所述的基于funnel区域的毫米波雷达有效目标物识别控制策略,其特征在于,步骤s1中,设定七块funnel区域,分别包括中间区域inner、中间左缓冲区域innerleft、中间右缓冲区域innerright、左邻道区域widerleft、右邻道区域widerright、左外车道区域outerleft、右外车道区域outerright;
3.根据权利要求2所述的基于funnel区域的毫米波雷达有效目标物识别控制策略,其特征在于,步骤s1中,funnel区域创建方法如下:
4.根据权利要求1所述的基于funnel区域的毫米波雷达有效目标物识别控制策略,其特征在于,步骤s2中,雷达数据筛选提取所处理数据包括目标物方位角、目标物横向与纵向速度、相对速度、相对加速度、目标物可信度。
5.根据权利要求4所述的基于funnel区域的毫米波雷达有效目标物识别控制策略,其特征在于,步骤s2中,以目标物方位角为索引把所有当前雷达检测到的目标物基于创建的funnel区域进行划分。
6.根据权利要求4所述的基于funnel区域的毫米波雷达有效目标物识别控制策略,其特征在于,步骤s2中,具体包括如下步骤,
7.根据权利要求1所述的基于funnel区域的毫米波雷达有效目标物识别控制策略,其特征在于,步骤s3中,目标物状态数据持续拟合是对距离信息做升/降平滑处理。
技术总结
本申请公开了一种基于Funnel区域的毫米波雷达有效目标物识别控制策略,包括基于车辆类型、毫米波雷达的安装方式、功能需求进行Funnel区域的创建,用于划分目标物类型;对雷达数据筛选提取,结合创建的Funnel区域对已经筛选到的雷达数据进行区域划分;基于当前区域目标进行目标物处理,完成碰撞区域内最小距离数据筛选与目标物状态数据持续拟合。本发明为一种高效且面向不同应用功能均可移植的有效目标物识别控制方法,属于新能源汽车自动驾驶与辅助驾驶控制领域。
技术研发人员:郭欣,郭洪强,赵婷婷
受保护的技术使用者:中通新能源汽车有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!