一种声源三维空间定位系统
本发明公开一种声源三维空间定位系统,涉及声源三维空间定位。
背景技术:
1、声音定位中包括回声定位与麦克风阵列定位,相比回声定位只能对声音传播过程中的反射音进行定位不同,麦克风阵列定位可以利用声源物体自身发出的声音进行定位。现有技术中麦克风阵列定位采用的原理通常为先得声源信号到各个麦克风之间的时间差再解方程组进行的几何定位,例如专利(cn201810611929)、(cn202010183115)。
2、实际上,应用前述的通过时间差与几何定位方式获得声源定位会存在误差,即获得的声源位置与实际不符合,其产生的原因包括多种例如噪声影响、几何计算方式存在的系统误差等。
3、综上所述,现有技术中的麦克风阵列定位方式获得的声源位置存在较大误差。
4、本
技术实现要素:
5、本发明目的在于,提供一种声源三维空间定位系统,降低麦克风阵列定位方式获得声音位置的误差。
6、为实现上述技术目的,达到上述技术效果,发明是通过以下技术方案实现:
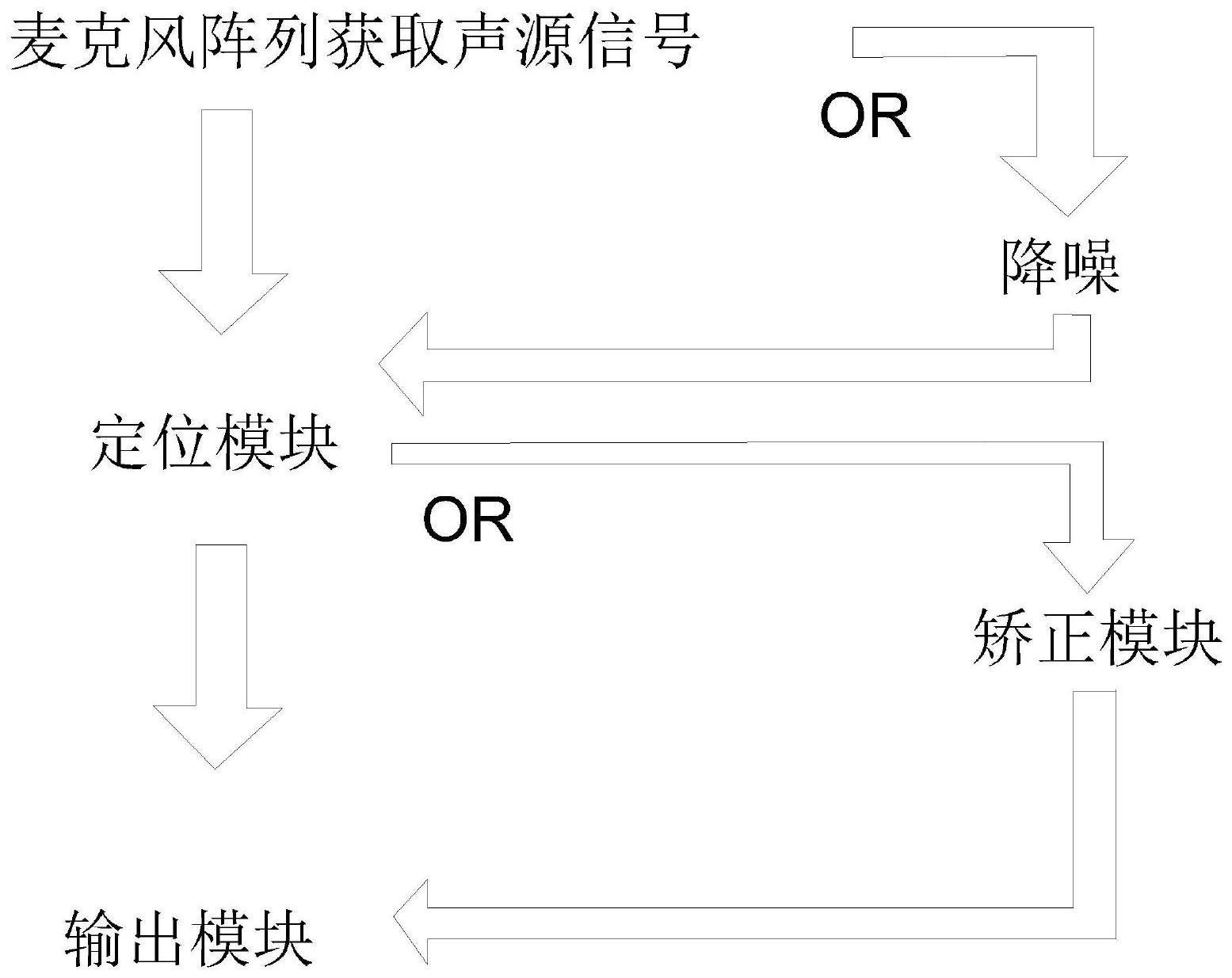
7、一种声源三维空间定位系统,包括:麦克风阵列、定位模块、输出模块,所述定位模块包括矫正模块。
8、进一步的,所述麦克风阵列用于接受声源信号,所述定位模块将获得的所述声源信号根据预设坐标轴进行定位获得定位数据,获得所述定位数据前所述矫正模块对所述定位模块中获得的定位数据进行误差矫正最后获得定位结果。
9、进一步的,所述定位数据通过计算声源信号到各个麦克风之间的时间差再解方程组进行的几何定位获得,所述输出模块将所述定位数据进行可视化处理。
10、进一步的,所述误差矫正具体为,先获得误差值,后在所述定位数据中除去所述误差值完成误差矫正,所述定位数据获得过程中存在延时估计误差。
11、进一步的,所述误差矫正具体包括如下步骤:
12、步骤1,获取理论误差值
13、所述理论误差值由所述定位数据的计算缺陷产生,所述理论误差根据不同情况中的所述延时估计误差与声速通过计算获得;
14、步骤2,去除所述理论误差值
15、根据所述理论误差与所述延时估计误差之间的函数关系去除所述理论误差值;
16、步骤3,综合仿真数据矫正误差
17、根据相同的所述预设坐标轴为基准获取所述定位数据的理论值,获取方式为仿真获取,将获取得到的仿真数据进行分析进而得出坐标修正因子,在步骤2的基础上引入所述坐标修正因子实现对所述定位数据误差的进一步修正。
18、进一步的,所述定位模块具体为,对所述麦克风整列接收到的声波信号进行降噪并分析得到所需时差,根据时差确定声源位置。
19、进一步的,所述步骤2中的去除所述理论误差值具体包括,计算不同的理论误差,包括仰角误差、水平偏角误差、声源到原点距离的估计误差,根据计算理论存在的误差情况,对不同情况下的声音位置进行分类处理。
20、进一步的,所述理论误差的计算方式为:
21、设d为阵元间距两个方向的平均值,阵列面积为s,时延估计误差均为στ,声速为c,声源到坐标原点距离r,水平偏角为α,仰角为β。
22、由所述时延估计误差στ引起的所述水平偏角α的估计误差为,
23、
24、由所述时延估计误差στ引起的所述仰角β的估计误差为,
25、
26、由所述时延估计误差στ引起声源到原点距离r的估计误差为,
27、
28、进一步的,所述水平偏角误差、声源仰角误差、声源到原点距离估计误差均分别与所述时延估计误差成正比关系,因此将声源水平偏角、声源仰角、声源到原点距离分别减去相应斜率与时延估计误差的乘积值,即可矫正各自误差。
29、进一步的,所述误差矫正步骤还包括预警步骤,所述预警步骤根据所述理论误差中的各项数据后获得的各类阈值,是否进行预警根据所述定位数据与所述预设计算结果判断;
30、所述预设计算结果根据不同环境中的所述延时估计误差与声速计算获得。
31、进一步的,所述时延估计误差στ=1μs,声速c=340m/s时,所述阀域具体为,所述水平偏角α误差大于0.24°时提示报警,当仰角β<15°时提示报警,当距离r增大到50m提示报警,所述预警步骤根据各项所述阀域限制情况进行判断是否提示报警。
32、进一步的,所述麦克风整列为四元平面麦克风阵列,所述四元麦克风阵列为四元矩形阵列,所述预设坐标轴原点为所述四元矩形阵列中的任意一个端点。
33、有益效果:
34、本发明在现有的声源定位的基础上增加了所述矫正模块,一方面可以根据仿真理论获得的数据对定位数据进行修正,另一方面也可以根据计算中存在的理论误差基于具体的延时误差、声速情况对获得的声源定位进行矫正或者产生报警,提高获得信息的准确度。另外,根据计算过程中理论误差进行矫正实际上也是基于防真获得的。
35、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
技术实现思路
技术特征:
1.一种声源三维空间定位系统,包括麦克风阵列、定位模块、输出模块,所述定位模块包括矫正模块,其特征在于:所述麦克风阵列用于接受声源信号,所述定位模块将获得的所述声源信号根据预设坐标轴进行定位获得定位数据,获得所述定位数据前所述矫正模块对所述定位模块中获得的定位数据进行误差矫正最后获得定位结果。
2.根据权利要求1所述的一种声源三维空间定位系统,其特征在于,所述定位数据通过计算声源信号到各个麦克风之间的时间差再解方程组进行的几何定位获得,所述输出模块将所述定位数据进行可视化处理;
3.根据权利要求2所述的一种声源三维空间定位系统,其特征在于,所述误差矫正具体包括如下步骤:
4.根据权利要求2所述的一种声源三维空间定位系统,其特征在于,所述定位模块具体为,对所述麦克风整列接收到的声波信号进行降噪并分析得到所需时差,根据时差确定声源位置。
5.根据权利要求3所述的一种声源三维空间定位系统,其特征在于,所述步骤2中的去除所述理论误差值具体包括,计算不同的理论误差,包括仰角误差、水平偏角误差、声源到原点距离的估计误差,根据计算理论存在的误差情况,对不同情况下的声音位置进行分类处理。
6.根据权利要求5所述的一种声源三维空间定位系统,其特征在于,所述理论误差的计算方式为:
7.根据权利要求3所述的一种声源三维空间定位系统,其特征在于,所述水平偏角误差、声源仰角误差、声源到原点距离的估计误差均分别与所述时延估计误差成正比关系,因此将声源水平偏角、声源仰角、声源到原点距离分别减去相应斜率与时延估计误差的乘积值,即可矫正各自误差。
8.根据权利要求7所述的一种声源三维空间定位系统,其特征在于,所述误差矫正步骤还包括预警步骤,所述预警步骤根据所述理论误差中的各项数据后获得的各类阈值,是否进行预警根据所述定位数据与所述预设计算结果判断;
9.根据权利要求8所述的一种声源三维空间定位系统,其特征在于,所述时延估计误差στ=1μs,声速c=340m/s时,所述阀域具体为,所述水平偏角α误差大于0.24°时提示报警,当仰角β<15°时提示报警,当距离r增大到50m,所述预警步骤根据各项所述阀域限制情况进行判断是否提示报警。
10.根据权利要求1所述的一种声源三维空间定位系统,其特征在于,所述麦克风整列为的四元平面麦克风阵列,所述四元麦克风阵列为四元矩形阵列,所述预设坐标轴原点为所述四元矩形阵列中的任意一个端点。
技术总结
本发明公开的一种声源三维空间定位系统,包括麦克风阵列、定位模块、输出模块,所述定位模块包括矫正模块,所述麦克风阵列用于接受声源信号,所述定位模块将获得的所述声源信号根据预设坐标轴进行定位获得定位数据,获得所述定位数据前所述矫正模块对所述定位模块中获得的定位数据进行误差矫正最后获得定位结果。本发明在现有的声源定位的基础上增加了所述矫正模块,一方面可以根据具体的时延误差、声速情况对获得的声源定位相关误差进行矫正或者产生报警,另一方面可以根据仿真理论获得的坐标修正因子对定位数据进行修正,提高获得信息的准确度。
技术研发人员:王云萍,聂诗卉,李志强,李国辉,高雨含,肖鸿雁,汪玮,韦国丞,刘双,邓邦林,何九宁,田荣刚,刘雪峰,史顺平,杨思雨
受保护的技术使用者:成都理工大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!