一种用于动态轮荷测定的车载传感器信号处理电路
本发明涉及汽车电子技术,尤其是涉及一种用于动态轮荷测定的车载传感器信号处理电路。
背景技术:
1、“新四化”趋势下的新能源智能汽车对环境感知与主动控制技术的需求正在迅速提升,这既是主动悬架控制,扭矩矢量控制等车辆动力学控制的要求,也是自动驾驶的需要。作为智驾系统的直接执行机构,智能底盘既是自动驾驶的软硬件基础,又决定着智能电动汽车的安全性,操控性,舒适性。面对目前尚有欠缺的智能底盘技术,中国汽车工程学会于2021年10月提出了《智能底盘技术路线图框架》,明确提出要大力发展底盘域控,x,y,z三向控制,主动悬架,线控制动等,提升底盘感知和控制能力。
2、在这样的趋势下,尤其对于智能底盘系统,利用更多的传感器,实现更加可靠的数据感知将是一切车载智能的基石。专利申请cn 2022103883415公开了一种汽车动态轮荷测定和驾驶安全辅助系统,通过采集悬架几何变形传感器、方向盘转角传感器等的数据实时计算车辆受到的动态轮荷。可随着传感器种类与数量的增多,尤其是一些更为先进传感器的应用,对于信号的要求也将越来越高。在这之中,伴随着电驱动系统更多的电磁干扰,模拟信号,尤其是电压变化范围微小的模拟信号在传输过程中如果不经处理,将受到严重的影响。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种用于动态轮荷测定的车载传感器信号处理电路。
2、本发明的目的可以通过以下技术方案来实现:
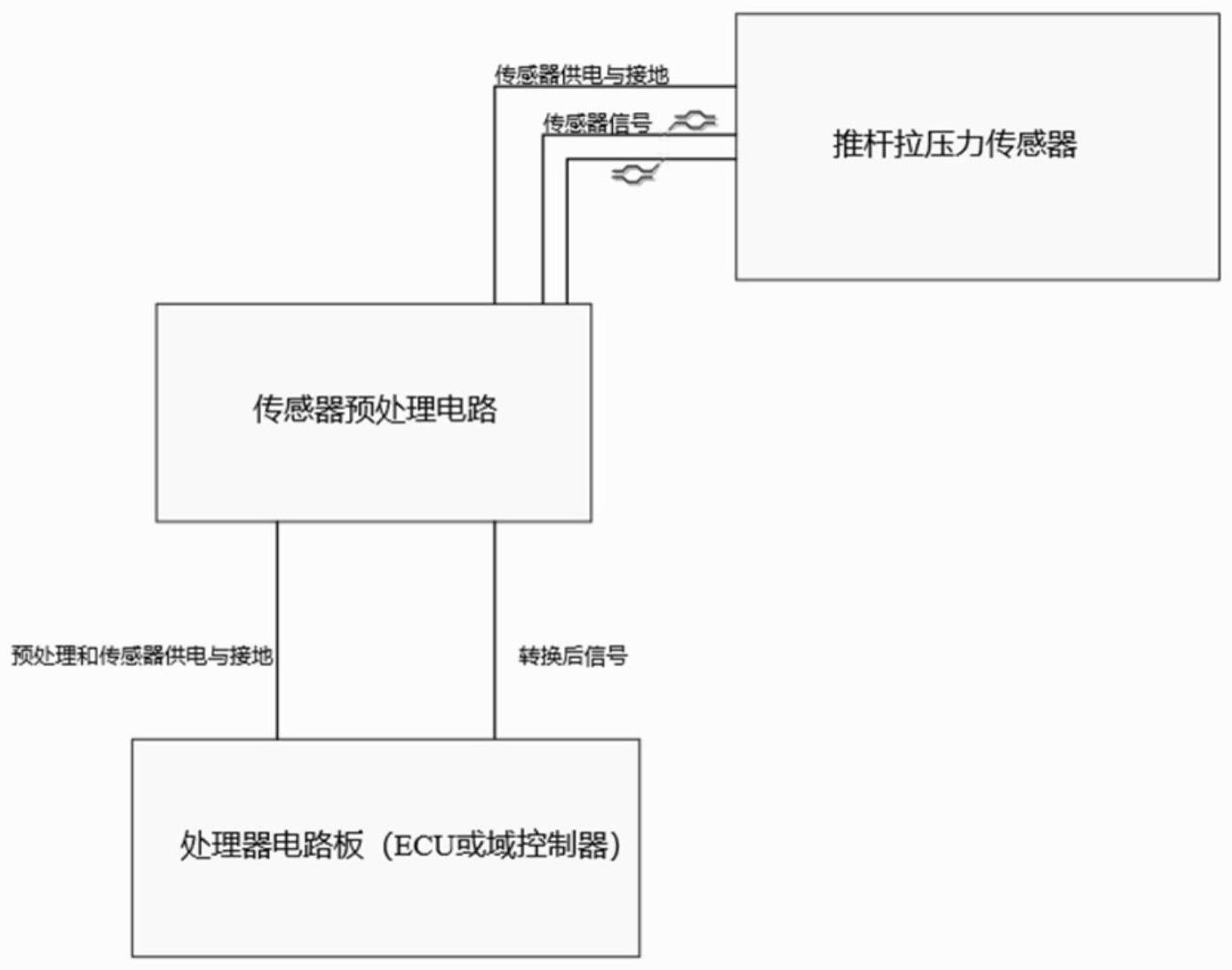
3、一种用于动态轮荷测定的车载传感器信号处理电路,包括依次连接的放大电路、跟随器电路与adc芯片,所述车载传感器输出一对差分信号,所述车载传感器的输出连接放大电路,所述adc芯片的输出连接整车处理器,所述放大电路使用两通道的仪表放大器。
4、进一步地,所述车载传感器数量为2个,所述仪表放大器使用ad型放大器芯片,所述ad型放大器芯片为双通道仪表放大器,通过外部电阻设置增益。
5、进一步地,ad型放大器芯片中,增益g与外部电阻rg的计算关系如下:
6、
7、输出电压与输入电压、参考电压以及放大器增益之间的计算关系如下:
8、vout=g×(vin++vin-)+vref
9、其中,vout为输出电压,vin+、vin-为差分信号的正负两路输入,vref为参考电压。
10、进一步地,使用参考电压发生芯片产生参考电压。
11、进一步地,选用dt13-10-pa型号板端插头作为所述ad型放大器芯片和参考电压发生芯片的板端插头。
12、进一步地,电容用作芯片电源的滤波,模拟信号地agnd与普通地gnd之间采用磁珠进行隔离。
13、进一步地,采用单独的两层对两个车载传感器进行布线。
14、进一步地,所述车载传感器与信号处理电路之间采用带屏蔽层的线。
15、进一步地,所述跟随器电路包括串联电阻以及电压跟随器。
16、与现有技术相比,本发明具有以下有益效果:
17、本发明设计了一套用于车辆底盘控制的传感器信号预处理电路,通过使用(仪表)放大器对车载传感器的差分信号进行放大,并在控制器部分使用电压跟随器而保证了数据的可靠准确,同时具备较强的通用性,可为其他车载传感器的信号处理提供参考。
技术特征:
1.一种用于动态轮荷测定的车载传感器信号处理电路,其特征在于,包括依次连接的放大电路、跟随器电路与adc芯片,所述车载传感器输出一对差分信号,所述车载传感器的输出连接放大电路,所述adc芯片的输出连接整车处理器,所述放大电路使用两通道的仪表放大器。
2.根据权利要求1所述的一种用于动态轮荷测定的车载传感器信号处理电路,其特征在于,所述车载传感器数量为2个,所述仪表放大器使用ad型放大器芯片,所述ad型放大器芯片为双通道仪表放大器,通过外部电阻设置增益。
3.根据权利要求2所述的一种用于动态轮荷测定的车载传感器信号处理电路,其特征在于,ad型放大器芯片中,增益g与外部电阻rg的计算关系如下:
4.根据权利要求3所述的一种用于动态轮荷测定的车载传感器信号处理电路,其特征在于,使用参考电压发生芯片产生参考电压。
5.根据权利要求4所述的一种用于动态轮荷测定的车载传感器信号处理电路,其特征在于,选用dt13-10-pa型号板端插头作为所述ad型放大器芯片和参考电压发生芯片的板端插头。
6.根据权利要求5所述的一种用于动态轮荷测定的车载传感器信号处理电路,其特征在于,电容用作芯片电源的滤波,模拟信号地agnd与普通地gnd之间采用磁珠进行隔离。
7.根据权利要求5所述的一种用于动态轮荷测定的车载传感器信号处理电路,其特征在于,采用单独的两层对两个车载传感器进行布线。
8.根据权利要求1所述的一种用于动态轮荷测定的车载传感器信号处理电路,其特征在于,所述车载传感器与信号处理电路之间采用带屏蔽层的线。
9.根据权利要求1所述的一种用于动态轮荷测定的车载传感器信号处理电路,其特征在于,所述跟随器电路包括串联电阻以及电压跟随器。
技术总结
本发明涉及一种用于动态轮荷测定的车载传感器信号处理电路,包括依次连接的放大电路、跟随器电路与ADC芯片,车载传感器输出一对差分信号,车载传感器的输出连接放大电路,ADC芯片的输出连接整车处理器,放大电路使用两通道的仪表放大器。与现有技术相比,本发明设计了一套用于车辆底盘控制的传感器信号预处理电路,从而保证了数据的可靠准确,同时具备较强的通用性,可为其他车载传感器的信号处理提供参考。
技术研发人员:刘泽宇,曾添一,陈昊天,陈辛波
受保护的技术使用者:同济大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!