点云数据匹配方法、装置、电子设备及计算机可读介质与流程
本申请涉及高精地图,尤其涉及点云数据匹配方法、装置、电子设备及计算机可读介质。
背景技术:
1、激光雷达(lidar)点云数据,是由三维激光雷达设备扫描得到的空间点的数据集,每一个点都包含了三维坐标信息,也是我们常说的x、y、z三个元素,有的还包含颜色信息、反射强度信息、回波次数信息等。激光点云数据,由车载激光扫描系统向周围发射激光信号,然后收集反射的激光信号得来的,再通过外业数据采集、组合导航、点云解算,便可以计算出这些点的准确空间信息。三维点云在自动驾驶领域中的应用可以分为以下两个方面:
2、基于场景理解和目标检测的实时环境感知和处理;
3、基于可靠定位和参考的高精度地图和城市模型的生成和构建。
4、在对视觉采集数据进行解算制作过程中,常采用通过匹配的点云数据,对高精地图相关数据的精度进行纠正,以使制作的数据拥有更高精度。
5、相关技术中一般通过拓扑关系匹配点云数据,但是,上述匹配点云数据的方式,容易匹配到与当前场景关联性低的点云数据,导致很多无效计算,增加后续数据融合过程中的计算量,影响整体数据处理流程效率。
技术实现思路
1、为解决或部分解决相关技术中存在的问题,本申请提供一种点云数据匹配方法、装置、电子设备及计算机可读介质,能够快速查找与目标物相关性更高的点云数据,实现数据降噪,减少数据处理量,提升计算效率。
2、本申请第一方面提供一种点云数据匹配方法,包括:
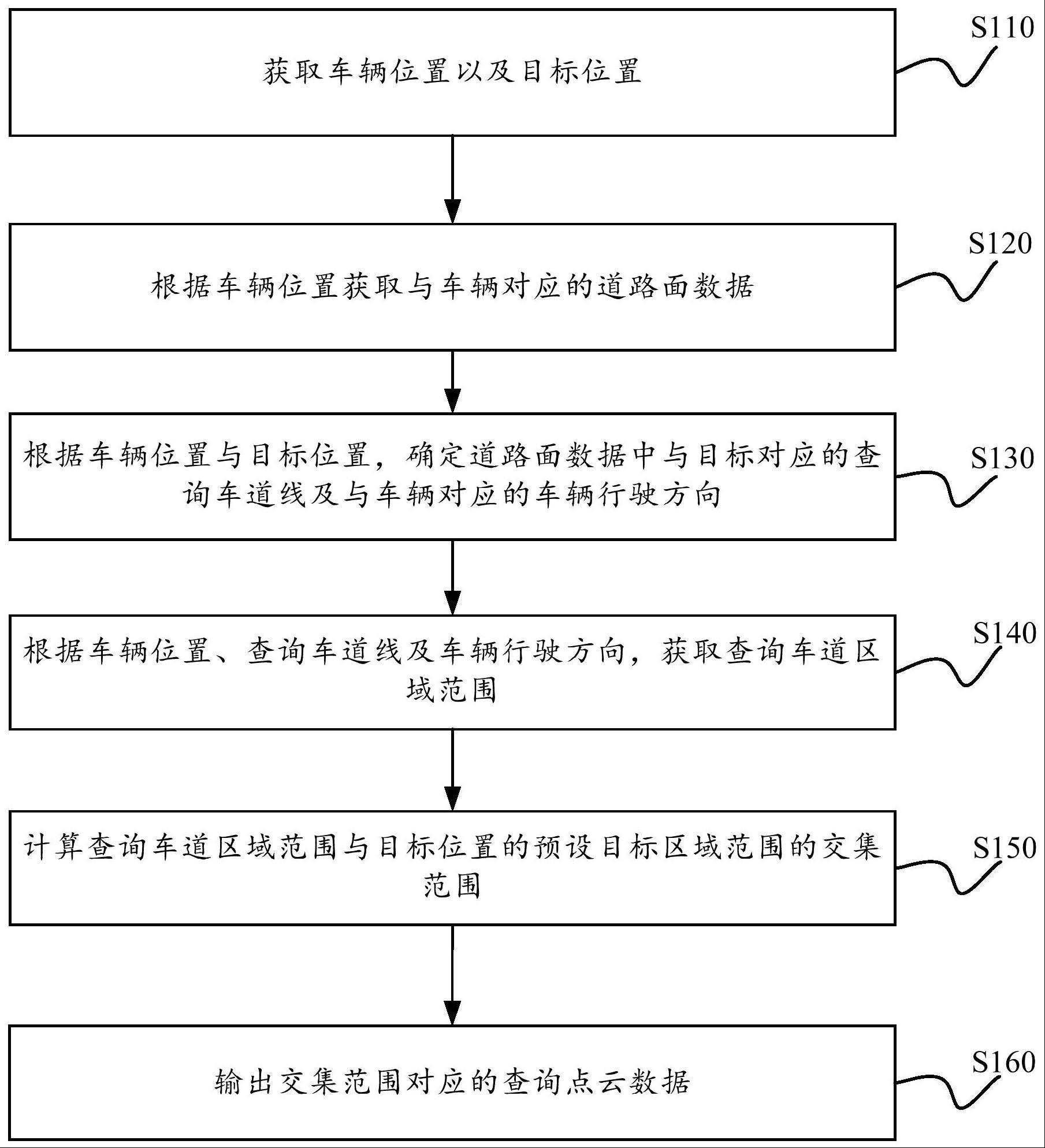
3、获取车辆位置以及目标位置;
4、根据所述车辆位置获取与车辆对应的道路面数据;
5、根据所述车辆位置与目标位置之间的距离关系,确定所述道路面数据中与目标对应的查询车道线及与车辆对应的车辆行驶方向;
6、根据所述车辆位置、查询车道线及车辆行驶方向,获取查询车道区域范围;
7、计算所述查询车道区域范围与所述目标位置的预设目标区域范围的交集范围;
8、输出所述交集范围对应的查询点云数据。
9、在一些实施例中,在所述根据所述车辆位置获取与车辆对应的道路面数据之前,该方法还包括:
10、查询所述目标位置预设周边范围的车道线数据;
11、所述根据所述车辆位置获取与车辆对应的道路面数据,包括:
12、根据所述车辆位置从所述预设周边范围的车道线数据中获取与车辆对应的道路面数据。
13、在一些实施例中,所述预设周边范围根据以下方式获取:
14、根据所述目标位置与车辆位置之间的距离关系,获取预设周边范围。
15、在一些实施例中,所述根据所述目标位置与车辆位置之间距离关系,获取预设周边范围,包括:
16、根据所述目标位置与车辆位置之间的距离小于或等于预设距离阈值,定义所述预设距离阈值为预设周边范围半径;或
17、根据所述目标位置与车辆位置之间的距离大于预设距离阈值,定义所述目标位置与车辆位置之间的距离为预设周边范围半径。
18、在一些实施例中,该方法还包括:
19、对获取的所述道路面数据进行数据筛除处理;
20、其中,所述数据筛除处理的数据对象至少包括:掉头车道车道线数据、反向车道车道线数据、辅路车道车道线数据。
21、在一些实施例中,所述根据所述车辆位置与目标位置之间的距离关系,确定所述道路面数据中与目标对应的查询车道线及与车辆对应的车辆行驶方向,包括:
22、根据所述车辆位置确定所述道路面数据中车辆对应的行驶车道数据;
23、根据所述行驶车道数据获取车辆所在车道距离目标位置最近的车道线及车辆对应的车辆行驶方向,定义所述车辆所在车道距离目标位置最近的车道线为查询车道线。
24、在一些实施例中,所述预设目标区域范围根据目标的可识别距离设定。
25、本申请第二方面提供一种点云数据匹配装置,包括:
26、定位模块,用于获取车辆位置以及目标位置;
27、数据获取模块,用于根据所述车辆位置获取与车辆对应的道路面数据;
28、数据确定模块,用于所述车辆位置与目标位置,确定所述道路面数据中与目标对应的查询车道线及与车辆对应的车辆行驶方向;
29、查询区域范围模块,用于根据所述车辆位置、查询车道线及车辆行驶方向,获取查询车道区域范围;
30、计算模块,用于计算所述查询车道区域范围与所述目标位置的预设目标区域范围的交集范围;
31、输出模块,用于输出所述交集范围对应的查询点云数据。
32、本申请第三方面提供一种电子设备,包括:
33、处理器;以及
34、存储器,其上存储有可执行代码,当所述可执行代码被所述处理器执行时,使所述处理器执行如上所述的方法。
35、本申请第四方面提供一种计算机可读存储介质,其上存储有可执行代码,当所述可执行代码被电子设备的处理器执行时,使所述处理器执行如上所述的方法。
36、本申请提供的技术方案可以包括以下有益效果:
37、本申请的技术方案,通过车辆位置与目标位置之间距离关系,从与车辆对应的道路面数据中确定查询车道线及车辆行驶方向,通过车辆位置、查询车道线及车辆行驶方向计算获取查询车道区域范围,利用查询车道区域范围与预设目标区域范围的交集获取查询点云数据,实现快速查找与目标物相关性更高的点云数据,减少噪声数据,减少数据处理量,提升计算效率。
38、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种点云数据匹配方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,在所述根据所述车辆位置获取与车辆对应的道路面数据之前,该方法还包括:
3.根据权利要求2所述的方法,其特征在于,所述预设周边范围根据以下方式获取:
4.根据权利要求3所述的方法,其特征在于,所述根据所述目标位置与车辆位置之间距离关系,获取预设周边范围,包括:
5.根据权利要求2所述的方法,其特征在于,该方法还包括:
6.根据权利要求1所述的方法,其特征在于,所述根据所述车辆位置与目标位置,确定所述道路面数据中与目标对应的查询车道线及与车辆对应的车辆行驶方向,包括:
7.根据权利要求1所述的方法,其特征在于,所述预设目标区域范围根据目标的可识别距离设定。
8.一种点云数据匹配装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其上存储有可执行代码,其特征在于:
技术总结
本申请涉及一种点云数据匹配方法、装置、电子设备及计算机可读介质。该方法包括:获取车辆位置以及目标位置;根据所述车辆位置获取与车辆对应的道路面数据;根据所述车辆位置与目标位置之间的距离关系,确定所述道路面数据中与目标对应的查询车道线及与车辆对应的车辆行驶方向;根据所述车辆位置、查询车道线及车辆行驶方向,获取查询车道区域范围;计算所述查询车道区域范围与所述目标位置的预设目标区域范围的交集范围;输出所述交集范围对应的查询点云数据。本申请提供的方案,能够快速查找与目标物相关性更高的点云数据,实现数据降噪,减少数据处理量,提升计算效率。
技术研发人员:李正旭,万如,朱磊,贾双成
受保护的技术使用者:智道网联科技(北京)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!