一种基于MEMS陀螺仪的超小型寻北系统
本发明属于mems陀螺仪寻北,特别是一种基于mems陀螺仪的超小型寻北系统。
背景技术:
1、陀螺寻北仪通过测量地球自转角速度,自主确定所附载体的真北方向值;因其不受外界磁场或其他环境的干扰和影响,被广泛运用于雷达定向、火炮初始对准、军用车辆方向控制、船舶远洋航行及隧道测量等军用、民用环境。然而目前广泛使用的光纤陀螺寻北仪体积大、成本高,严重限制其使用场景,这严重限制着陀螺寻北仪的民用化、普及化;因此各高校、研究机构开始基于mems陀螺仪开展小型化寻北仪研制。
2、然而,目前基于mems陀螺仪的小型化寻北仪多为方案或者实验室样机,而基于小型转台的寻北仪工程样机更是稀少,且嵌入超小型寻北仪的转台的控制精度低而导致旋转调制技术的惯性器件误差补偿效果不佳,导致小型化寻北仪寻北精度普遍较低。
技术实现思路
1、本发明的目的在于针对上述现有技术存在的问题,提供一种基于mems陀螺仪的超小型寻北系统。
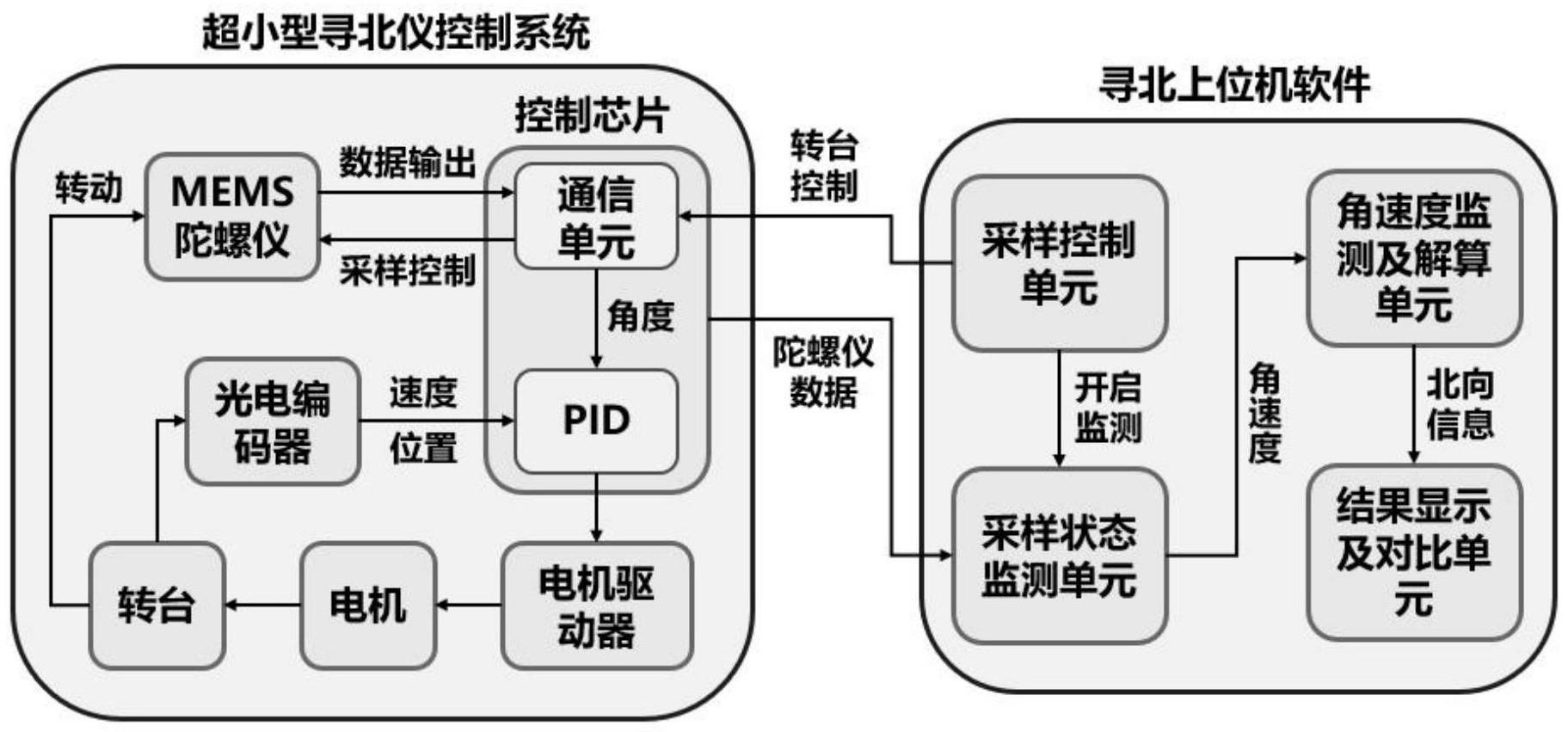
2、实现本发明目的的技术解决方案为:一方面,提供了一种基于mems陀螺仪的超小型寻北系统,包括寻北上位机软件及超小型寻北仪控制系统;
3、所述寻北上位机软件,通过通讯单元及串行接口实现上位机与寻北仪间的通信,进而实现寻北流程并实时显示数据流;
4、所述超小型寻北仪控制系统,在接收到寻北上位机软件传输的控制指令后,控制安装有mems陀螺仪的转台朝指定角度旋转,并实现mems陀螺仪的采样控制及数据传输;
5、所述寻北上位机软件,还用于接收超小型寻北仪控制系统传输的mems陀螺仪采样数据,解算得到真北向信息。
6、进一步地,所述寻北上位机软件包括采样控制单元、采样状态监测单元、角速度监测及解算单元,和结果显示及对比单元;
7、所述采样控制单元,用于实现转台转动角度控制、采样时长控制及采样启动指令输出;
8、所述采样状态监测单元,用于实现实时数据流监测、采样状态显示及采样终止指令输出;
9、所述角速度监测及解算单元,用于实时解算出转台对应角度采样得到的地球自转角速度信息,并由此计算得到北向信息;
10、所述结果显示及对比单元,用于显示当前北向夹角及整体寻北次数,并在历史数据框中记录当前解算时间和结果,实现数据对比。
11、进一步地,所述超小型寻北仪控制系统包括光电编码器、电机驱动器、控制芯片、电机、转台及设置于转台上的mems陀螺仪;
12、所述光电编码器,用于实时监测转台的速度和位置信息;
13、所述控制芯片,用于接收采样控制单元输出的控制信息,并对比该控制信息和光电编码器监测的信息,控制电机驱动器对电机进行闭环控制,使转台位置与设定的角度相符。
14、进一步地,所述控制芯片包括通信单元和pid算法模块;
15、所述通信单元,用于接收采样控制单元输出的控制信息,并将其中转台的角度信息传输至pid算法模块;
16、所述pid算法模块,用于对接收到的角度信息和光电编码器监测的信息进行实时对比,同时控制电机驱动器对电机进行闭环控制,使转台位置与设定的角度相符。
17、另一方面,提供了一种基于mems陀螺仪的寻北方法,所述方法包括:
18、步骤1,在寻北上位机软件中的采样控制单元中设置转台控制信息,进行转台角度控制;
19、步骤2,控制芯片的通信单元发出采样开始指令使mems陀螺仪采样并将角速度数据输出到通信单元,之后由控制芯片将陀螺仪数据通过串行接口发送到寻北上位机软件;
20、步骤3,寻北上位机软件将接收到的串口数据在采样状态监测单元中的输入数据框内实时显示,同时在实时角速度、采样组数中对应显示;
21、步骤4,寻北上位机软件中的采样状态监测单元对采样时长进行实时监测,当采样时长达到设定值时自动发送采样停止控制码,并实时显示在采样控制单元中的发送控制码框,当系统接收到采样停止控制码后,由控制芯片中的通信单元发出采样结束指令停止陀螺仪工作;
22、步骤5,在采样结束之后,由角速度监测及解算单元实时解算出对应角度采样得到的地球自转角速度信息;
23、步骤6,重复上述步骤实现四个角度的数据采样,获得四个位置的角速度信息,由此计算得到北向信息;
24、步骤7,由结果显示及对比单元显示当前北向夹角及整体寻北次数,并在历史数据框中记录当前解算时间和结果,实现数据对比。
25、本发明与现有技术相比,其显著优点为:
26、1)本发明的基于mems陀螺仪的超小型寻北系统面向小型化微惯性寻北仪样机,基于控制芯片实现光电编码器、电机驱动器及陀螺仪控制,并内嵌pid算法实现转台转角高精度控制,形成了超小型寻北仪控制系统,为多位置旋转调制算法提供精确的定位信息,提高了误差补偿的准确度。
27、2)基于控制芯片实现了数据整合及串口输出,完成了寻北仪与外界智能设备的实时沟通。
28、3)由于超小型寻北仪是封闭空间,无法实时监测内部运作情况,通过寻北上位机软件可实现内部工作状态监测,并可拓展转台转速、角度及正反转动监测模块,同时针对采样得到的地球自转角速度可实现误差数据的实时滤除,实现了高精度北向信息的实时解算。
29、下面结合附图对本发明作进一步详细描述。
技术特征:
1.一种基于mems陀螺仪的超小型寻北系统,其特征在于,包括寻北上位机软件及超小型寻北仪控制系统;
2.根据权利要求1所述的基于mems陀螺仪的超小型寻北系统,其特征在于,所述寻北上位机软件包括采样控制单元、采样状态监测单元、角速度监测及解算单元,和结果显示及对比单元;
3.根据权利要求1或2所述的基于mems陀螺仪的超小型寻北系统,其特征在于,所述超小型寻北仪控制系统包括光电编码器、电机驱动器、控制芯片、电机、转台及设置于转台上的mems陀螺仪;
4.根据权利要求3所述的基于mems陀螺仪的超小型寻北系统,其特征在于,所述控制芯片包括通信单元和pid算法模块;
5.根据权利要求3所述的基于mems陀螺仪的超小型寻北系统,其特征在于,所述控制芯片采用单片机。
6.基于权利要求1至5任意一项所述系统的基于mems陀螺仪的寻北方法,其特征在于,所述方法包括:
7.根据权利要求6所述的基于mems陀螺仪的寻北方法,其特征在于,步骤4中发送采样停止控制码还可以通过触发暂停接收按钮实现,实现自主控制。
8.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求6至7中任一项所述方法的内容。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求6至7中任一项所述方法的内容。
技术总结
本发明公开了一种基于MEMS陀螺仪的超小型寻北系统,包括寻北上位机软件及超小型寻北仪控制系统,上位机软件通过串行接口及通讯单元实现上位机与寻北仪间的通信;控制系统在接收到上位机软件的控制指令后,控制转台朝指定角度旋转,并实现较高的角度控制精度,并实现MEMS陀螺仪的采样控制及数据传输;最终由上位机软件接收MEMS陀螺仪采样数据解算得到真北向信息。本发明基于高可靠性制备的超小型寻北仪,通过内嵌寻北仪控制系统,并外置寻北上位机软件,实现了旋转平台转动角度的实时高精度控制及陀螺仪采样数据实时显示,确保多位置寻北方案带来的累积误差补偿性能的有效性,并基于滤波解算算法,实现了小型化前提下的高精度寻北。
技术研发人员:谢锦宣,周同,高子然,吴奇龙,白宏阳,苏岩
受保护的技术使用者:南京理工大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!