基于GNSS/IMU/里程表耦合的车辆导航干扰信号检测方法
本发明涉及信号的传输、控制、检测,尤其涉及基于gnss/imu/里程表耦合的车辆导航干扰信号检测方法。
背景技术:
1、全球导航卫星系统(global navigation satellite system,gnss) 具有覆盖范围广、成本低和全天候的定位优势,是新一代信息技术的时空基础设施,也是自动驾驶和智能交通的基础性关键技术。gnss定位授时在国防安全、生产生活中发挥着越来越重要的作用。然而,由于gnss接收机通过接收卫星信号实现授时和定位,在信号传输过程中存在被攻击或者误导而导致定位和授时不可靠的固有缺陷。
2、防止干扰信号攻击已成为一个重要的研究课题并取得了一些具有重要价值的成果。jafarnia等人提出了一种基于接收机时钟偏差变化分析的真实性验证技术,实现了多接收机载波相位测量的干扰信号检测。khanafseh等人提出了一种基于接收机自主完整性监测技术的gps/惯性导航系统(inertial navigation system,ins)组合导航系统检测方法,完整性风险评估结果表明这种方法能够成功检测接收机轨迹的干扰信号攻击,由于惯性测量单元(inertial measurement unit,imu)的偏差和漂移的累积效应,定位可靠性仍待进一步提升,检测干扰信号攻击准确性较低,特别是微机械类惯性导航系统。
技术实现思路
1、为克服在各种复杂的环境中,由于有限的硬件资源使得惯性测量单元偏差过大,导致无法有效的检测gnss干扰信号攻击,进而得到错误的定位授时结果的技术缺陷,本发明提供了基于gnss/imu/里程表耦合的车辆导航干扰信号检测方法。
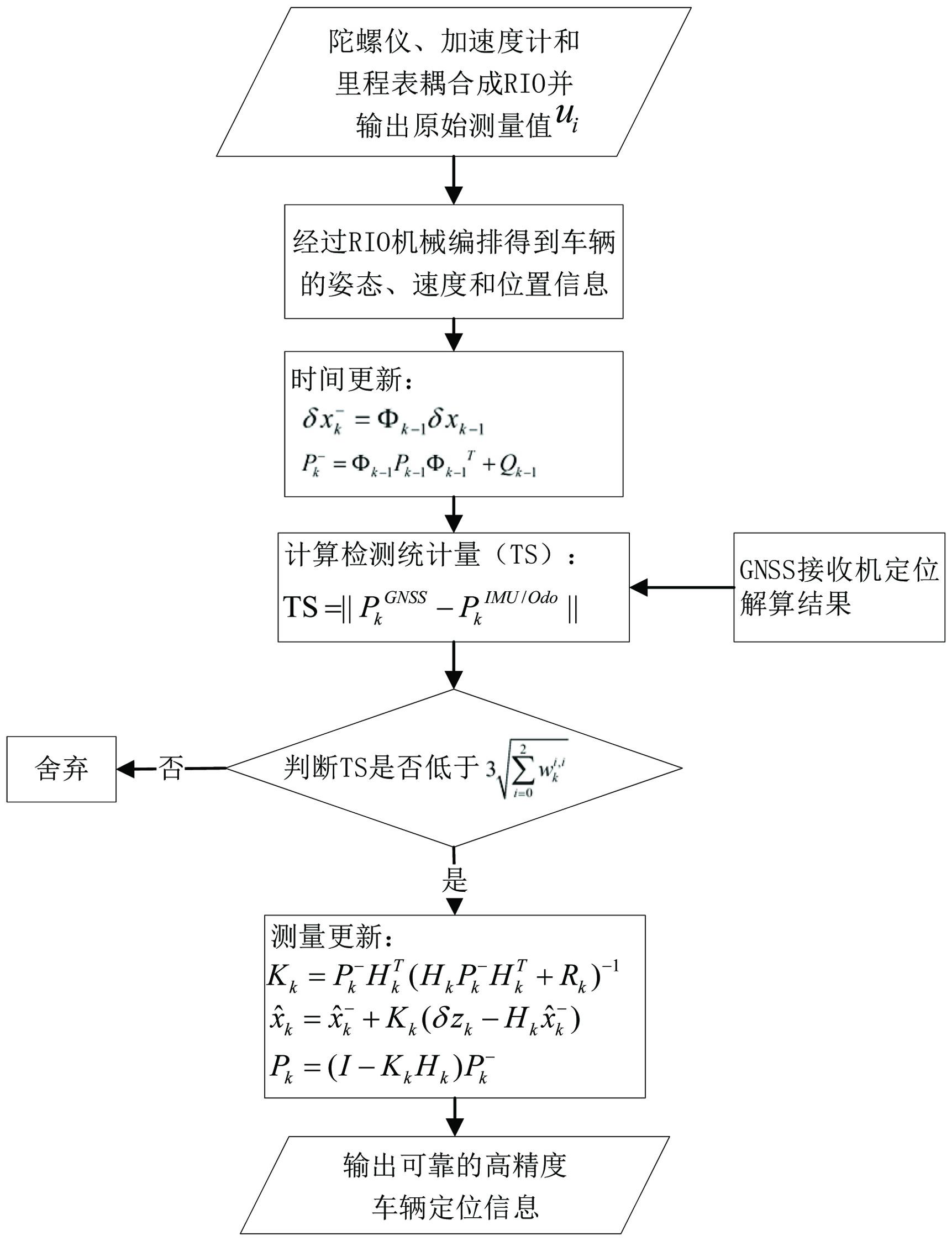
2、本发明公开了基于gnss/imu/里程表耦合的车辆导航干扰信号检测方法,包括以下步骤:
3、步骤一、通过将一个垂直陀螺仪、两个加速度计和一个里程表耦合形成rio,两个加速度计分别安装在车辆的东向和北向方向,用于测量车辆东向和北向的位置变化,垂直陀螺仪安装在与车辆天向对齐的方向上,用于测量车辆的航向角变化,车辆的原始测量值由一个垂直陀螺仪、两个加速度计和一个里程表的输出组成,其中为:
4、 (1)
5、其中,是里程表输出的速度,是里程表输出的加速度,和是东向和北向的加速度计输出,是垂直陀螺仪的输出;
6、根据rio的定位原理,车辆的姿态信息根据公式(2)得到:
7、 (2)
8、其中,、和分别表示横滚角、俯仰角和方位角,是重力加速度,是地球自转角速率,是当地卯酉圈曲率半径, 是k-1时刻里程表输出的东向速度,是接收信号的时间差,是k-1时刻车辆的纬度,hk-1表示k-1时刻的高程,ak-1表示k-1时刻的方位角;
9、车辆的速度信息根据公式(3)得到:
10、 (3)
11、其中,表示里程表输出的东向速度,表示里程表输出的北向速度,表示里程表输出的天向速度;
12、车辆的位置信息根据公式(4)得到:
13、 (4)
14、其中,、和分别是当地的纬度、经度和高度,是当地子午圈曲率半径;
15、那么,rio的原始测量值经机械编排后的定位向量为:
16、 (5)
17、其中下标表示时间历元;
18、步骤二、由于系统动态模型和测量模型都是弱非线性的,在忽略高阶扰动的情况下,卡尔曼滤波的状态方程和测量方程为:
19、 (6)
20、 (7)
21、其中,为测量向量,为设计矩阵,为测量噪声,是时刻到时刻的状态转移矩阵, 根据rio的机械编排模型得到,是时刻的过程噪声,δxk-1为k-1时刻的9维误差状态向量,是k时刻的9维误差状态向量:
22、 (8)
23、其中,是大地坐标系中的位置矢量分量误差,是系中的速度矢量误差,是方位角误差,是里程表的比例因子,是垂直陀螺仪漂移;
24、卡尔曼滤波的时间更新过程为:
25、 (9)
26、 (10)
27、其中,为先验估计向量,pk-1 表示k-1时刻后验估计量对应的协方差矩阵,为对应的协方差矩阵,表示过程噪声对应的协方差矩阵;
28、步骤三、当gnss接收机输出包括位置和速度的定位信息时,利用rio检测当前历元的gnss信号是否为干扰信号,将gnss接收机和rio输出的位置信息差作为检测统计量:
29、 (11)
30、步骤四、计算检测统计量对应的协方差矩阵为:
31、 (12)
32、其中表示测量噪声协方差矩阵,在过程噪声和测量噪声都符合零均值高斯白噪声假设的情况下,表示第i行第j列元素,表示在位置域的子矩阵迹,如果:
33、 (13)
34、可以判定当前历元的gnss信号是干扰信号,则舍弃当前历元的gnss定位信息,如果:
35、 (14)
36、那么判定当前历元的gnss信号为正常信号,则将当前历元的gnss定位信息用于卡尔曼滤波的测量更新:
37、 (15)
38、 (16)
39、 (17)
40、其中,表示单位矩阵,kk表示k时刻的卡尔曼滤波增益;
41、步骤五、根据步骤四得到时刻的后验状态向量以及对应的协方差矩阵,同时输出可靠的高精度车辆定位信息。
42、本发明提供的技术方案与现有技术相比具有如下优点:通过本发明所述的基于gnss/imu/里程表耦合的车辆导航干扰信号检测方法,利用了gnss/imu/里程表各自的优势,能实现低成本条件下gnss干扰信号攻击的有效检测,而且准确性高,提高了定位授时可靠性。
技术特征:
1.基于gnss/imu/里程表耦合的车辆导航干扰信号检测方法,其特征在于,包括以下步骤:
技术总结
本发明涉及信号的传输、控制、检测技术领域,尤其涉及基于GNSS/IMU/里程表耦合的车辆导航干扰信号检测方法。首先,将IMU和里程表耦合形成低成本的RIO,再利用RIO的原始测量值经机械编排后得到车辆的姿态、速度和位置等定位信息,从而确定卡尔曼滤波模型的状态向量;然后,将GNSS和RIO的定位信息通过卡尔曼滤波模型进行融合,同时利用RIO的定位信息检测当前历元的GNSS信号是否为干扰信号,如果检测结果表明GNSS信号非干扰信号,则将GNSS定位信息作为测量向量执行卡尔曼滤波的测量更新过程,最后输出车辆可靠的高精度定位信息。该方法能有效识别复杂城市环境下GNSS干扰信号,有效提高车辆组合导航系统定位信息的可靠性。
技术研发人员:程俊兵,高云飞,武杰
受保护的技术使用者:太原理工大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!