三自由度霍尔位移传感器标定系统和方法
本发明属于高精度位移检测标定,具体涉及一种三自由度霍尔位移传感器标定系统和方法、电子设备和计算机存储介质。
背景技术:
1、非接触式位移传感器如电容式传感器、电感式传感器、电涡流式传感器、光栅式传感器、激光式传感器、霍尔传感器等在精密测试与控制场合有着广泛的运用,在诸如磁悬浮离心泵等不能使用接触式位移传感器的场合,其使用的非接触式位移传感器是运动与控制的基准,是设备正确运行的保障,因此在这些传感器安装到设备上之前,需要对其进行标定。
2、现有的位移传感器标定系统存在复杂度高、功能单一、系统集成度低、结构模态低导致标定效率低等问题,使得在实际的标定测试中使用困难且稳定性差。
3、专利cn201610957068.8提出了一种微位移传感器标定装置,采用双频激光干涉仪作为标定基准,采用压电堆叠作为驱动,采用平行四边形四杆机构作为运动组件,可实现高精度、高频率的传感器标定,但是由于多种标定组件的使用,使得系统的复杂度大大提高,整个标定系统存在较大的装配难度,从而导致标定精度难以实现。
4、现有方案系统存在复杂度高、功能单一、系统集成度低、结构模态低导致标定效率低等问题,如何实现部件设计简单、连接可靠,空间布置合理,可同时完成单轴、双轴、三轴位移传感器的标定系统是一个极具挑战性和商业价值的尝试。
技术实现思路
1、针对以上这些会务组织的客观问题,本发明旨在提供一种三自由度霍尔位移传感器标定系统和方法、电子设备和计算机存储介质。
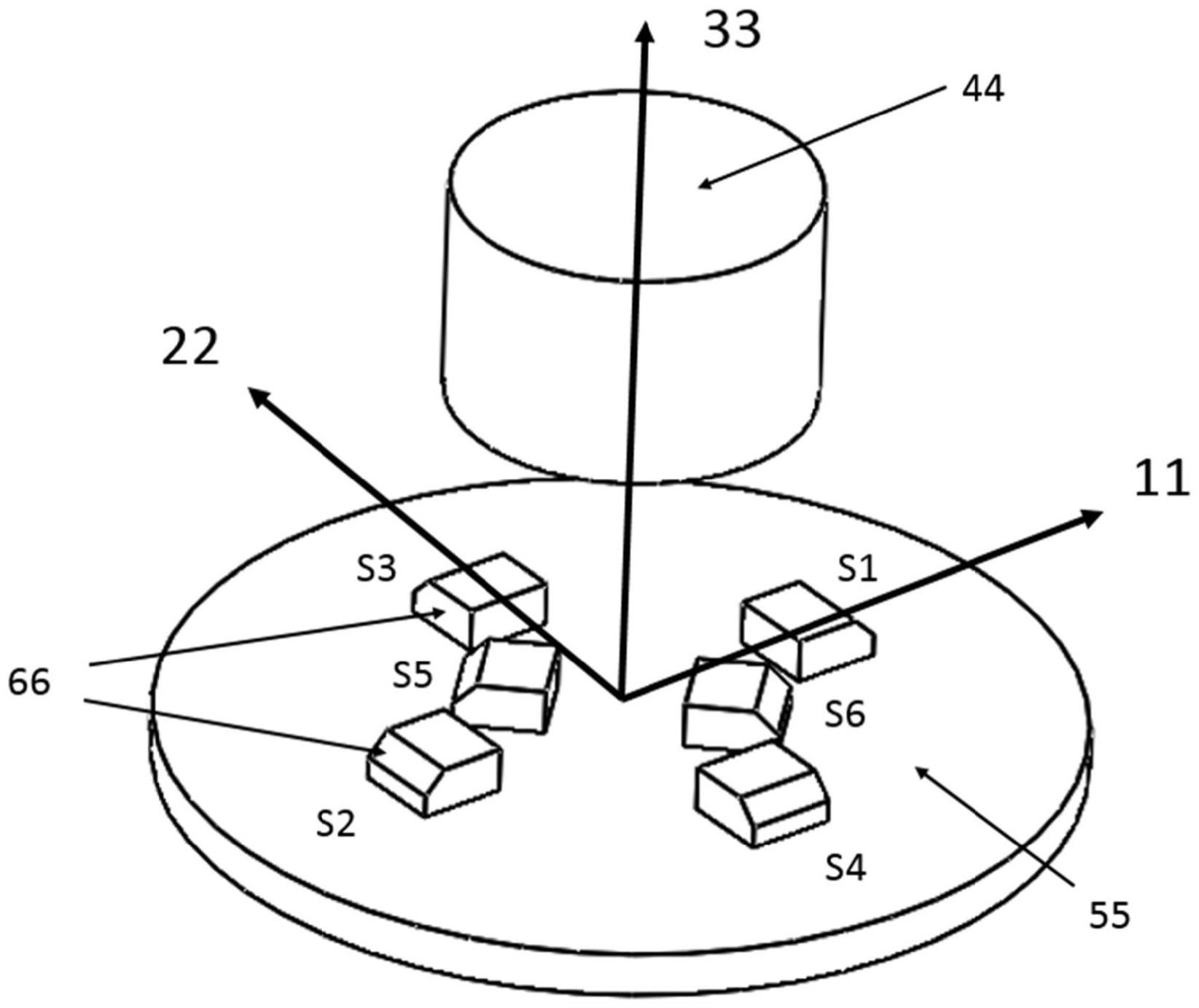
2、为解决上述技术问题,本发明采用的一个技术方案是:提供一种三自由度霍尔位移传感器,包括固定基板和设置在所述固定基板上的3组霍尔传感器;
3、其中2组所述组霍尔传感器分别分布在相互垂直的第一方向和第二方向上,第一方向上的霍尔传感器组与第二方向上的霍尔传感器组分别沿另一组霍尔传感器组的延长线对称分布;
4、另一组所述组霍尔传感器沿第一方向上的霍尔传感器组与第二方向上的霍尔传感器组延长线的交汇点中心对称分布。
5、一种三自由度霍尔位移传感器标定系统,用以标定所述三自由度霍尔位移传感器,包括被标定传感器、第一方向标定模块、第二方向标定模块、第三方向标定模块、磁源模块、第一标定测试模块、机架和上位机;
6、所述被标定传感器设置于所述机架上,并与所述上位机分别连接;
7、所述磁源模块设置于所述第三方向标定模块上,所述第三方向标定模块设置于所述第二方向标定模块上,所述第二方向标定模块设置于所述第一标定模块上,所述第一标定模块设置于所述机架上;
8、所述第一标定测试模块设置于所述机架上,所述第一标定测试模块所述磁源模块相对设置。
9、其中所述被标定传感器包括固定基板和设置在所述固定基板上的3组霍尔传感器;
10、其中2组所述组霍尔传感器分别分布在相互垂直的第一方向和第二方向上,第一方向上的霍尔传感器组与第二方向上的霍尔传感器组分别沿另一组霍尔传感器组的延长线对称分布;
11、另一组所述组霍尔传感器沿第一方向上的霍尔传感器组与第二方向上的霍尔传感器组延长线交汇点中心对称分布。
12、可选的,所述第一标定测试模块包括固定设置在所述机架上的固定块,和分别固定设置在所述固定块第一方向、第二方向和第三方向的接触式位移标定传感器。
13、可选的,所述第一方向标定模块、所述第二方向标定模块和所述第三方向标定模块结构相同安装方向不同,所述第一方向标定模块包括运动模块机座、设置于运动模块机座两端的丝母限位块、位于两个丝母限位块之间的滚珠丝杆和套设于滚珠丝杆上的丝母连接块。
14、可选的,所述第一方向标定模块的运动模块机座与所述机架于第一方向固定连接、所述第二方向标定模块的运动模块机座与所述第一方向标定模块的丝母连接块于第二方向固定连接、所述第三方向标定模块电动运动模块机座与所述第二方向标定模块的丝母连接块于第三方向固定连接,所述磁源模块固定连接于所述第三方向标定模块的丝母连接块上。
15、可选地,所述第一方向标定模块、所述第二方向标定模块和所述第三方向标定模块还分别包括第二标定测试模块,所述第二标定测试模块为千分尺,所述千分尺通过千分尺固定座安装于所述运动模块机座上,所述千分尺通过联轴器与所述滚珠丝杆连接。
16、可选地,所述磁源模块包括磁源固定块和安装于磁源固定块上的磁源,所述磁源固定块与所述第三方向标定模块的丝母连接块固定连接。
17、本发明还提供一种三自由度霍尔位移传感器标定方法,包括如下步骤:
18、开机复位自检;
19、如无故障则开始标定步骤,如有故障则提示故障原因并返回上一步骤;
20、根据所需标定自由度判断自由度个数和自由度方向;
21、选择对应自由度,所述自由度个数包括单轴、双轴和三轴;所述自由度方向包括第一方向、第二方向和第三方向;
22、对选定的对应自由度结构调整;
23、根据标定测试模块反馈的信号对霍尔位移传感器进行标定。
24、可选的,自由度判断步骤前还包括精度判断步骤,所述精度判断步骤包括确定精度需求,所述精度需求包括高精度需求和低精度需求;
25、根据对应精度需求,选择对应标定测试模块,如采用高精度需求时则采用第一标定测试模块进行标定,如为低精度需求时则采用第二标定测试模块进行标定。
26、本发明还提供一种计算机存储介质,包括一条或多条计算机指令,所述一条或多条计算机指令在执行时实现上述的标定方法。
27、本发明提出了一种结构稳定并且具有三自由度位移传感器标定能力的标定系统。所提出的标定系统各个部件设计简单、连接可靠,空间布置合理,可同时完成单轴、双轴、三轴位移传感器的标定任务,系统功能集成度高;并且可以通过标定的精度要求灵活切换标定传感器,系统可塑性与灵活性高。
技术特征:
1.一种三自由度霍尔位移传感器标定系统,用以标定所述三自由度霍尔位移传感器,其特征在于,包括被标定传感器、第一方向标定模块、第二方向标定模块、第三方向标定模块、磁源模块、第一标定测试模块、机架和上位机;
2.如权利要求1所述的三自由度霍尔位移传感器标定系统,其特征在于,所述第一标定测试模块包括固定设置在所述机架上的固定块,和分别固定设置在所述固定块第一方向、第二方向和第三方向的接触式位移标定传感器。
3.如权利要求1所述的三自由度霍尔位移传感器标定系统,其特征在于,所述第一方向标定模块、所述第二方向标定模块和所述第三方向标定模块结构相同安装方向不同,所述第一方向标定模块包括运动模块机座、设置于运动模块机座两端的丝母限位块、位于两个丝母限位块之间的滚珠丝杆和套设于滚珠丝杆上的丝母连接块。
4.如权利要求3所述的三自由度霍尔位移传感器标定系统,其特征在于,所述第一方向标定模块的运动模块机座与所述机架于第一方向固定连接、所述第二方向标定模块的运动模块机座与所述第一方向标定模块的丝母连接块于第二方向固定连接、所述第三方向标定模块电动运动模块机座与所述第二方向标定模块的丝母连接块于第三方向固定连接,所述磁源模块固定连接于所述第三方向标定模块的丝母连接块上。
5.如权利要求4所述的三自由度霍尔位移传感器标定系统,其特征在于,所述第一方向标定模块、所述第二方向标定模块和所述第三方向标定模块还分别包括第二标定测试模块,所述第二标定测试模块包括千分尺,所述千分尺通过千分尺固定座安装于所述运动模块机座上,所述千分尺通过联轴器与所述滚珠丝杆连接。
6.如权利要求3所述的三自由度霍尔位移传感器标定系统,其特征在于,所述磁源模块包括磁源固定块和安装于磁源固定块上的磁源,所述磁源固定块与所述第三方向标定模块的丝母连接块固定连接。
7.一种三自由度霍尔位移传感器标定方法,其特征在于,包括如下步骤:
8.如权利要求7所述的三自由度霍尔位移传感器标定方法,其特征在于,自由度判断步骤前还包括精度判断步骤,所述精度判断步骤包括
9.一种电子设备,其特征在于,所述电子设备包括:存储器,存储至少一个指令;及处理器,获取所述存储器中存储的指令以实现上述的标定方法。
10.一种计算机存储介质,其特征在于,包括一条或多条计算机指令,所述一条或多条计算机指令在执行时实现如权利要求8或9所述的标定方法。
技术总结
本发明属于高精度位移检测标定技术领域,具体涉及一种三自由度霍尔位移传感器标定系统和方法,其中被标定传感器设置于机架上,并与上位机分别连接;磁源模块设置于第三方向标定模块上,第三方向标定模块设置于第二方向标定模块上,第二方向标定模块设置于第一标定模块上,第一标定模块设置于机架上;第一标定测试模块设置于机架上,第一标定测试模块磁源模块相对设置。本发明提出的三自由度位移传感器标定能力的标定系统结构设计简单、连接可靠,空间布置合理,可同时完成单轴、双轴、三轴位移传感器的标定任务,系统功能集成度高;并且可以通过标定的精度要求灵活切换标定传感器,系统可塑性与灵活性高。
技术研发人员:江负成,孙天夫,郑海荣,梁嘉宁,令狐勇,李慧云,赵子昊
受保护的技术使用者:中国科学院深圳先进技术研究院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!