基于激光雷达传感器的障碍物距离反馈方法及装置与流程
本发明涉及激光雷达传感器应用,尤其是涉及一种基于激光雷达传感器的障碍物距离反馈方法及装置。
背景技术:
1、激光雷达传感器是根据飞行时间(tof)测量原理运行的。在极高的同步时钟下,以均匀的时间间隔发射激光,激光光束遇到物体时会反射回来,扫描传感器接收到反射的光束后,通过发射和接收的时间差δt来计算从激光传感器到物体的距离。
2、现有技术中,通常利用激光光束对周围进行二维扫描,获得一个环境轮廓图形;通过2d激光反馈的x、y数据及icp计算出来的对应的角度来实现对障碍物的大小尺寸、偏差δx、δy、δθ来判断是否可以绕行、纠偏、尺寸大小等功能。
3、然而,激光雷达避障区域有限,且不能实时反馈障碍物的距离,机器人无法根据雷达扫描测量障碍物距离的数据,实现准确避障,物体特征识别及辅助二次辅助定位导航。
技术实现思路
1、本发明旨在至少解决上述技术问题之一。
2、为此,本发明提出了一种基于激光雷达传感器的障碍物距离反馈方法及装置,以解决激光雷达避障区域有限、识别区域少以及不能实时反馈障碍物距离作为判断依据的问题。
3、根据本申请的第一方面实施例,提供了一种基于激光雷达传感器的障碍物距离反馈方法,包括以下步骤:
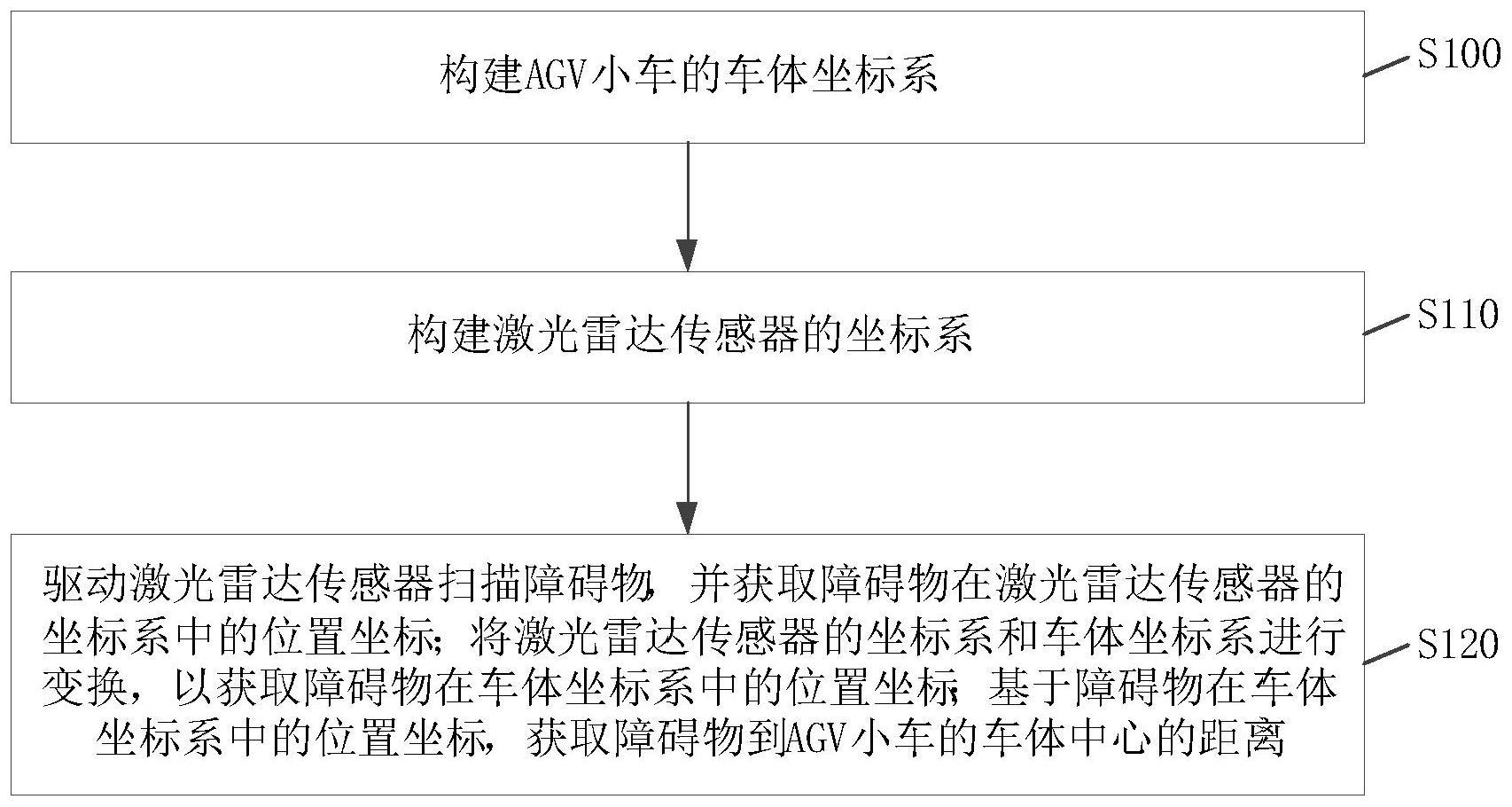
4、构建agv小车的车体坐标系;
5、构建激光雷达传感器的坐标系;
6、驱动所述激光雷达传感器扫描障碍物,并获取所述障碍物在所述激光雷达传感器的坐标系中的位置坐标;以及,将所述激光雷达传感器的坐标系和所述车体坐标系进行变换,以获取所述障碍物在所述车体坐标系中的位置坐标;以及,基于所述障碍物在所述车体坐标系中的位置坐标,获取所述障碍物到所述agv小车的车体中心的距离。
7、在上述方法中,所述激光雷达传感器的坐标系与所述车体坐标系间的变换关系式如下:
8、
9、式中:x、y、z为车体坐标系;x、y、z为激光雷达传感器的坐标系;α为翻滚角;β为俯仰角;θ为偏航角。
10、在上述方法中,所述激光雷达传感器的坐标系与所述车体坐标系间的变换通过ros系统中的坐标变换模块tf2实现。
11、在上述方法中,所述障碍物的轮廓线与所述agv小车的行进方向的夹角在-15°~+15°之间。
12、在上述方法中,所述障碍物的轮廓线长度大于等于0.7m。
13、在上述方法中,所述激光雷达传感器水平安装在所述agv小车的插脚上。
14、根据本申请的第二方面实施例,提供了一种基于激光雷达传感器的障碍物距离反馈装置,包括:
15、车体坐标系构建模块,用于构建agv小车的车体坐标系;
16、传感器坐标系构建模块,用于构建激光雷达传感器的坐标系;
17、距离获取模块,用于驱动所述激光雷达传感器扫描障碍物,并获取所述障碍物在所述激光雷达传感器的坐标系中的位置坐标;以及,用于将所述激光雷达传感器的坐标系和所述车体坐标系进行变换,以获取所述障碍物在所述车体坐标系中的位置坐标;以及,用于基于所述障碍物在所述车体坐标系中的位置坐标,获取所述障碍物到所述agv小车的车体中心的距离。
18、在上述装置中,所述距离获取模块包括:
19、第一位置坐标获取单元,用于驱动所述激光雷达传感器扫描障碍物,并获取所述障碍物在所述激光雷达传感器的坐标系中的位置坐标;
20、第二位置坐标获取单元,用于将所述激光雷达传感器的坐标系和所述车体坐标系进行变换,以获取所述障碍物在所述车体坐标系中的位置坐标;
21、距离获取单元,用于基于所述障碍物在所述车体坐标系中的位置坐标,计算获取所述障碍物到所述agv小车的车体中心的距离。
22、根据本申请的第三方面实施例,提供了一种终端,包括存储器和处理器,所述存储器上存储有可在所述处理器上运行的计算机程序,所述处理器运行所述计算机程序时执行上述所述的基于激光雷达传感器的障碍物距离反馈方法。
23、根据本申请的第四方面实施例,提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的计算机程序,其中,在所述计算机程序被处理器运行时控制所述存储介质所在终端执行上述所述的基于激光雷达传感器的障碍物距离反馈方法。
24、根据本申请所提供的技术方案,至少具有如下有益效果,通过激光雷达传感器扫描障碍物,即可实时获取障碍物在激光雷达传感器的坐标系中的位置坐标,也即是障碍物相对激光雷达传感器的位置和距离;通过将激光雷达传感器的坐标系与车体坐标系进行变换,即可实时获取障碍物在车体坐标系中的位置坐标,也即是实时获取障碍物相对agv小车的位置和距离,有利于agv小车在行进过程中能够准确避障。采用上述反馈方法和反馈装置,在使激光雷达传感器摆脱激光避障区域限制的同时,还可以识别障碍物相对激光雷达传感器的坐标系的x轴、y轴的偏差距离及偏差角度,以便提供精确的导航定位。
25、本申请的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本申请而了解。本申请的目的和其他优点可通过在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
技术特征:
1.一种基于激光雷达传感器的障碍物距离反馈方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的反馈方法,其特征在于,所述激光雷达传感器的坐标系与所述车体坐标系间的变换关系式如下:
3.根据权利要求1所述的反馈方法,其特征在于,所述激光雷达传感器的坐标系与所述车体坐标系间的变换通过ros系统中的坐标变换模块tf2实现。
4.根据权利要求1所述的反馈方法,其特征在于,所述障碍物的轮廓线与所述agv小车的行进方向的夹角在-15°~+15°之间。
5.根据权利要求1所述的反演方法,其特征在于,所述障碍物的轮廓线长度大于等于0.7m。
6.根据权利要求1所述的反演方法,其特征在于,所述激光雷达传感器水平安装在所述agv小车的插脚上。
7.一种基于激光雷达传感器的障碍物距离反馈装置,其特征在于,包括:
8.根据权利要求7所述的反馈装置,其特征在于,所述距离获取模块包括:
9.一种终端,包括存储器和处理器,所述存储器上存储有可在所述处理器上运行的计算机程序,其特征在于,所述处理器运行所述计算机程序时执行权利要求1至6中任意一项所述的基于激光雷达传感器的障碍物距离反馈方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质包括存储的计算机程序,其中,在所述计算机程序被处理器运行时控制所述存储介质所在终端执行权利要求1至6中任意一项所述的基于激光雷达传感器的障碍物距离反馈方法。
技术总结
本发明公开了一种基于激光雷达传感器的障碍物距离反馈方法,包括以下步骤:构建AGV小车的车体坐标系;构建激光雷达传感器的坐标系;驱动激光雷达传感器扫描障碍物,并获取障碍物在激光雷达传感器的坐标系中的位置坐标;以及,将激光雷达传感器的坐标系和车体坐标系进行变换,以获取障碍物在车体坐标系中的位置坐标;以及,基于障碍物在车体坐标系中的位置坐标,获取障碍物到AGV小车的车体中心的距离。
技术研发人员:李飞军,邹家帅,昝学彦,阮伟杰,陈斯源,赵华祥,李发频,蒋干胜,徐波
受保护的技术使用者:珠海创智科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!