使用机器学习的超声缺陷检测和分类系统的制作方法
背景技术:
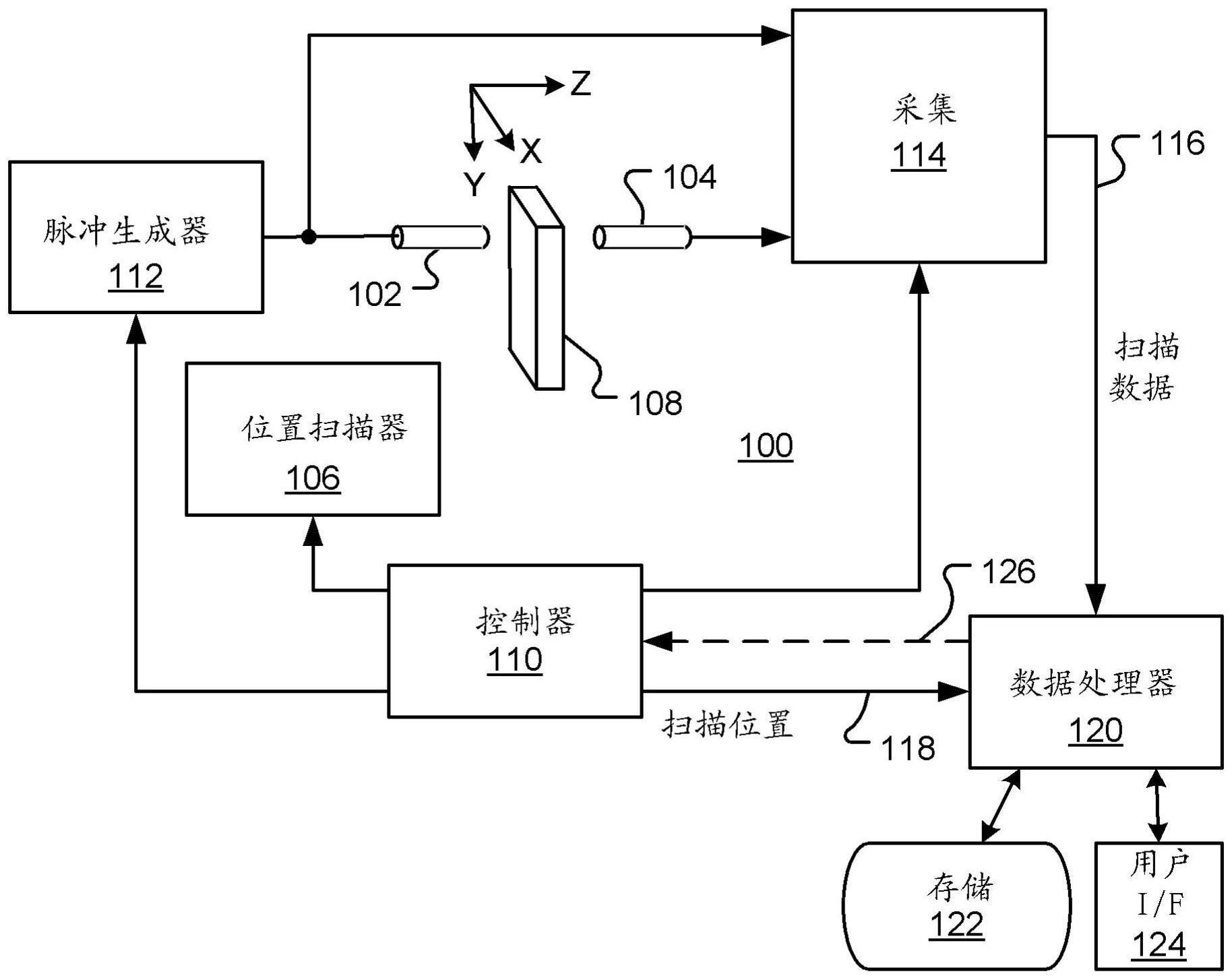
1、本公开涉及超声非破坏测试(ndt)的环境。一种机械定位系统可以使超声收发器换能器和在被测试器件(dut)的相对侧上的接收器换能器同步地进行扫描。ndt可以被用于例如测试半导体晶片,其可以包含多个器件和芯片封装。从dut回到收发器的反射信号是tdr(时域反射)波形,而从第二接收器收集的波形是tdt(时域传输)波形。两个波形的时间轴与沿着表示dut的位置空间的z轴的距离直接成比例。使换能器沿着由dut的x轴和y轴限定的位置空间进行扫描。扫描的波形由采集系统数字化,并且图像构建器块基于tdt/tdr扫描数据创建dut的缺陷图像。
2、传统上,人类操作员被训练以观察图像并且识别晶片或封装中的缺陷。其要求许多经验和训练来执行该任务。目前,存在可以自动检测和分类必须被标识的缺陷的一些类型的算法。有时这些算法不能如需要那样检测缺陷。
技术实现思路
技术特征:
1.一种计算机实现的方法,包括:
2.根据权利要求1所述的计算机实现的方法,其中:
3.根据权利要求1所述的计算机实现的方法,进一步包括:
4.根据权利要求1所述的计算机实现的方法,进一步包括基于第一深度神经网络的输出和第二深度神经网络的输出之间的距离的对比损失来调整第一深度神经网络和第二深度神经网络的权重值。
5.根据权利要求1所述的计算机实现的方法,进一步包括:当确定扫描的对象包含缺陷时,将扫描图像传递到自动缺陷分类器。
6.一种计算机实现的方法,包括:
7.根据权利要求6所述的计算机实现的方法,进一步包括从使用彩色图像训练的深度神经网络复制深度神经网络的特征映射层中的权重值。
8.根据权利要求6所述的计算机实现的方法,进一步包括:存储训练数据集合包括:
9.一种自动缺陷检测系统,包括:
10.根据权利要求9所述的自动缺陷检测系统,进一步包括存储参考超声扫描的存储器,其中参考超声扫描是无缺陷对象的扫描。
11.根据权利要求9所述的自动缺陷检测系统,其中输入预处理器被配置为:
12.根据权利要求11所述的自动缺陷检测系统,其中第二输入特征映射是第二三维(3d)图像张量,第二3d图像张量具有:
13.根据权利要求11所述的自动缺陷检测系统,其中输入预处理器被配置为:
14.根据权利要求9所述的自动缺陷检测系统,进一步包括:
15.根据权利要求9所述的自动缺陷检测系统,其被配置为:
16.根据权利要求9所述的自动缺陷检测系统,其中第一计算机实现的神经网络包括具有多个互相关层的深度神经网络。
技术总结
公开了使用机器学习的超声缺陷检测和分类系统。在自动缺陷检测和分类系统中,一个或多个计算设备访问在对象的超声扫描中获取的扫描数据。包括二维(2D)扫描图像的第一输入特征映射是根据扫描数据构建的并且被输入到第一深度神经网络以生成第一输出特征映射。包括无缺陷对象的图像的第二输入特征映射被输入到具有与第一深度神经网络相同的结构和权重值的第二深度神经网络,以产生第二输出特征映射。当第一输出特征映射和第二输出特征映射之间的距离大时,确定被扫描的对象包含缺陷。在替换的方法中,2D扫描图像和无缺陷对象的一个或多个图像被输入到使用彩色图像训练的神经网络的不同信道。
技术研发人员:J·J·皮克德,K·瑞恩
受保护的技术使用者:SONIX公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!