一种基于可调梯度激光系统和RTK定位技术的3D摊铺控制装置的制作方法
本发明属于3d摊铺智能控制,涉及一种基于可调梯度激光系统和rtk定位技术的3d摊铺控制装置。
背景技术:
1、现有的智能3d摊铺系统主要包括3d摊铺机、rtk设备、激光系统和控制系统。在这个系统中,3d摊铺机本身并无改进,与现有的走钢丝型的摊铺机一样;激光系统主要用来测量摊铺的高程;基于gps的rtk设备作为一种高精度的平面坐标定位手段;控制系统主要是接收rtk设备和激光系统采集的坐标数据、对数据进行综合处理,然后通过与设计数据比对,生成控制摊铺机的控制信息,从而达到摊铺的标准要求。
2、3d摊铺智能控制技术方案的一个关键环节是3d摊铺机的高程测量,rtk设备测量的高程精度满足不了要求,所以高程信息测量基本上都采用激光系统。激光系统的工作原理是激光发射器发出一个激光平面,激光接收器接收到激光信号,将其传给控制系统,控制系统根据平面坐标位置获取预设高程信息,结合激光测量实际高程,计算出高程差值信息,用于控制摊铺厚度。实际工程中,路面的高程起伏落差在一个比较大的区间,而激光接收器能够接收到激光信号目前主要有两种方式:第一种是激光发射器采用域激光技术,激光在竖直方向上一个区间内发射,这样激光接收器可以在竖直方向的一个区间内都能接收到激光信号;第二种是激光发射器采用自动全站仪跟踪激光探测器,发射和接收都集中在一个设备中,3d摊铺机上通过一个光学器件反射激光到发射装置。这两种方案存在如下问题:
3、第一种方式的域激光发射器为国外专利技术,因此成本很高;
4、第二种方式由于单个系统需要3台自动全站仪,每台全自动全站仪成本也很高,同时操作复杂,需要专业人员进行操作,普通工人无法实施操作。
5、基于以上原因,这两种方式都无法大面积推广3d摊铺系统。
技术实现思路
1、本发明的目的是提供一种基于可调梯度激光系统和rtk定位技术的3d摊铺控制装置,其基于rtk高精度定位技术,除了定位3d摊铺机的位置,同时也定位激光发射器的位置,通过激光发射器可调梯度的发射激光来追踪激光接收器的高度变化,根据rtk定位技术获取的高精度位置信息,通过空间几何关系来计算出激光接收器的高度变化,从而实现低成本、自动化的高程测量。
2、为了实现上述目的,本发明采用的技术方案为:
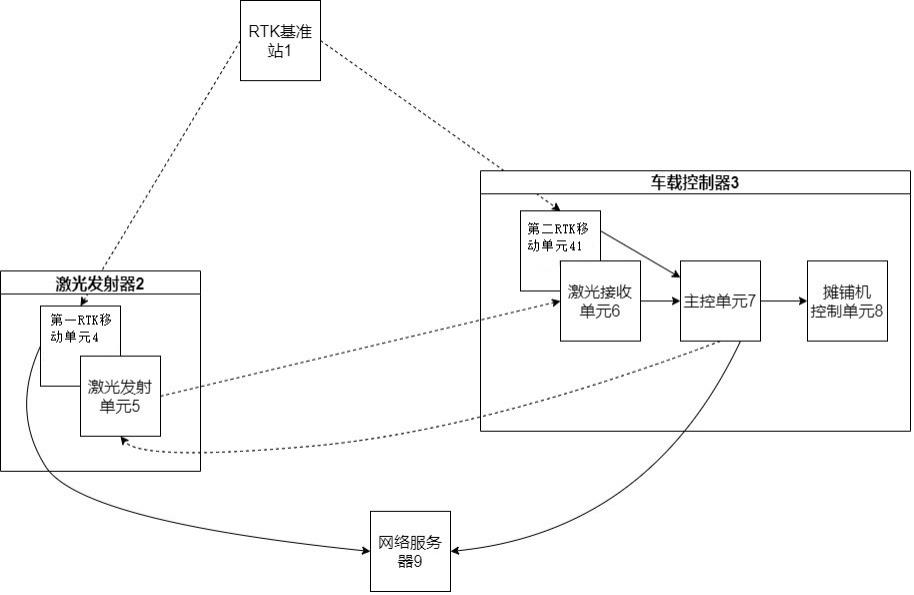
3、一种基于可调梯度激光系统和rtk定位技术的3d摊铺控制装置,包括rtk基准站、激光发射器和车载控制器,所述的车载控制器内设置有主控单元和摊铺机控制单元,其特征在于:所述激光发射器内设置有第一rtk移动单元和激光发射单元,所述的车载控制器内还设置有第二rtk移动单元和激光接收单元,所述rtk基准站和所述第一rtk移动单元及第二rtk移动单元无线通信连接,所述rtk基准站发送rtk差分数据分别给所述的第一rtk移动单元及第二rtk移动单元,所述第一rtk移动单元和所述第二rtk移动单元根据所述的rtk差分数据分别解算出所述激光发射器和所述车载控制器的坐标数据,并将所述的坐标数据分别传递给所述的主控单元,所述主控单元根据所述坐标数据发送调整激光平面角度的指令到所述的激光发射单元,所述激光发射单元发射激光信号到所述的激光接收单元,所述激光接收单元接收到激光信号后将其转换成相应激光发射器的相对高度值,并将所述的高度值再回传给所述主控单元,所述主控单元根据车载控制器的坐标数据与所述的高度值进行差值运算并将所述差值输入到所述的摊铺机控制单元,所述的摊铺机控制单元调整摊铺厚度。
4、进一步,所述rtk基准站和所述第一rtk移动单元及第二rtk移动单元的无线通信连接为wifi、移动通信网络或者fm通讯方式。
5、进一步,所述第一rtk移动单元和第二rtk移动单元将解算出的坐标数据通过网络服务器中转或有线连接方式传输给所述的主控单元。
6、进一步,所述的激光发射器包括多个,多个所述的激光发射器依次间隔设置在路面桩点桩基上。
7、进一步,所述的摊铺机控制单元将相对差值转换成控制摊铺机液压杆高低的信号从而控制所述摊铺机液压杆的高度。
8、进一步,所述的激光发射器通过确定激光发射面相对于桩点的桩基高度为所述主控单元提供所述的坐标数据。
9、进一步,所述激光发射器先通过第一rtk移动单元获取激光发射器的平面坐标值,然后通过激光发射器的激光平面和测量已知绝对高程的桩基高度确定所述激光发射器的绝对高程,从而提供所述激光发射器的坐标数据。
10、进一步,所述激光接收单元分别设置在3d摊铺机的左右两侧与3d摊铺机的摊铺机熨平板连接,3d摊铺机的左右两侧的高程信息通过所述的激光接收单元采集。
11、本发明由于采取以上技术方案,其具有以下优点:
12、本发明的3d摊铺控制装置通过在常规激光发射器的基础上叠加rtk定位技术实现了3d摊铺机高程信息的自动跟踪计算,大幅度地降低了测量设备的成本;同时控制装置在使用过程中减少了人员参与数量以及降低了对工程人员的技能要求,便于大面积的推广使用。
技术特征:
1.一种基于可调梯度激光系统和rtk定位技术的3d摊铺控制装置,包括rtk基准站(1)、激光发射器(2)和车载控制器(3),所述的车载控制器(3)内设置有主控单元(7)和摊铺机控制单元(8),其特征在于:所述激光发射器(2)内设置有第一rtk移动单元(4)和激光发射单元(5),所述的车载控制器(3)内还设置有第二rtk移动单元(41)和激光接收单元(6),所述rtk基准站(1)和所述第一rtk移动单元(4)及第二rtk移动单元(41)无线通信连接,所述rtk基准站(1)发送rtk差分数据分别给所述的第一rtk移动单元(4)及第二rtk移动单元(41),所述第一rtk移动单元(4)和所述第二rtk移动单元(41)根据所述的rtk差分数据分别解算出所述激光发射器(2)和所述车载控制器(3)的坐标数据,并将所述的坐标数据分别传递给所述的主控单元(7),所述主控单元(7)根据所述坐标数据发送调整激光平面角度的指令到所述的激光发射单元(5),所述激光发射单元(5)发射激光信号到所述的激光接收单元(6),所述激光接收单元(6)接收到激光信号后将其转换成相应激光发射器(2)的相对高度值,并将所述的高度值再回传给所述主控单元(7),所述主控单元(7)根据车载控制器(3)的坐标数据与所述的高度值进行差值运算并将所述差值输入到所述的摊铺机控制单元(8),所述的摊铺机控制单元(8)调整摊铺厚度。
2.根据权利要求1所述的一种基于可调梯度激光系统和rtk定位技术的3d摊铺控制装置,其特征在于:所述rtk基准站(1)和所述第一rtk移动单元(4)及第二rtk移动单元(41)的无线通信连接为wifi、移动通信网络或者fm通讯方式。
3.根据权利要求1或2所述的一种基于可调梯度激光系统和rtk定位技术的3d摊铺控制装置,其特征在于:所述第一rtk移动单元(4)和第二rtk移动单元(41)将解算出的坐标数据通过网络服务器(9)中转或有线连接方式传输给所述的主控单元(7)。
4.根据权利要求3所述的一种基于可调梯度激光系统和rtk定位技术的3d摊铺控制装置,其特征在于:所述的激光发射器(2)包括多个,多个所述的激光发射器(2)依次间隔设置在路面桩点桩基上。
5.根据权利要求4所述的一种基于可调梯度激光系统和rtk定位技术的3d摊铺控制装置,其特征在于:所述的摊铺机控制单元(8)将相对差值转换成控制摊铺机液压杆高低的信号从而控制所述摊铺机液压杆的高度。
6.根据权利要求5所述的一种基于可调梯度激光系统和rtk定位技术的3d摊铺控制装置,其特征在于:所述的激光发射器(2)通过确定激光发射面相对于桩点的桩基高度为所述主控单元(7)提供所述的坐标数据。
7.根据权利要求6所述的一种基于可调梯度激光系统和rtk定位技术的3d摊铺控制装置,其特征在于:所述激光发射器(2)先通过第一rtk移动单元(4)获取激光发射器(2)的平面坐标值,然后通过激光发射器(2)的激光平面和测量已知绝对高程的桩基高度确定所述激光发射器(2)的绝对高程,从而提供所述激光发射器(2)的坐标数据。
8.根据权利要求1所述的一种基于可调梯度激光系统和rtk定位技术的3d摊铺控制装置,其特征在于:所述激光接收单元(6)分别设置在3d摊铺机的左右两侧与3d摊铺机的摊铺机熨平板连接,3d摊铺机的左右两侧的高程信息通过所述的激光接收单元(6)采集。
技术总结
本发明涉及一种基于可调梯度激光系统和RTK定位技术的3D摊铺控制装置,包括RTK基准站、激光发射器和车载控制器,车载控制器和激光反射器均内设置有RTK移动单元,RTK基准站将RTK差分数据分别发射给RTK移动单元,RTK移动单元根据差分数据分别解算出坐标数据到主控单元,主控单元根据坐标数据发送调整指令到激光发射单元,激光发射单元发射激光信号到激光接收单元,激光接收单元接收到激光信号后将其转换成相应高度值传递给所述主控单元,主控单元根据车载控制器的坐标数据与所述的高度值进行差值运算并将所述差值输入到摊铺机控制单元。本发明在激光发射器的基础上叠加RTK定位技术,实现了3D摊铺机高程信息的自动跟踪计算,大幅度地降低了测量成本。
技术研发人员:张瑢,滕飞,徐新富,王书琪
受保护的技术使用者:西安兴唐物联科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!