铁路货车智能巡检系统、方法、巡检机器人、设备及介质与流程
本发明涉及自动化检测,尤其涉及一种铁路货车智能巡检系统、方法、巡检机器人、设备及介质。
背景技术:
1、货车状态修以往都是单纯依靠人工进行,而这种方式并不能保证这些部件状态万无一失,而且由于货车运行时段为全天24小时,因此仅仅依靠人工对货车进行状态修故障检测将会增加检修工人的负担,整个过程变得费时费力,当工人在检查货车侧部或者底部是否存在故障时,需长时间使用肉眼主观的对其诸多关键部件进行检测,随着检测任务量的不断增大,不免会出现一些判断失误,因此整个货车组状态修作业效率并不是很高。
2、随着状态修项目的深入推进,迫切需要智能检车模式的落地,提高检车效率的同时,大大减轻了人工检车的工作量,人工只需要将机检识别的故障进行确认,之后将实际故障进行报修。现有的检测设备大多是进行动态检测,及在车辆行驶过程中,通过检测设备完成车辆状态的动态检测。而工作人员现场检车是静态检车,即车辆静止不动,人工通过目测完成车辆检测。相对于动态检测,静态检测更高效稳定,但静态检测仍需要依赖人工,导致检测的人工成本较高,效率受限。综上所述,现有技术中的货车状态巡检存在效率较低的问题。
技术实现思路
1、针对上述问题,本发明的实施例提供了一种铁路货车智能巡检系统、方法、巡检机器人、设备及介质。
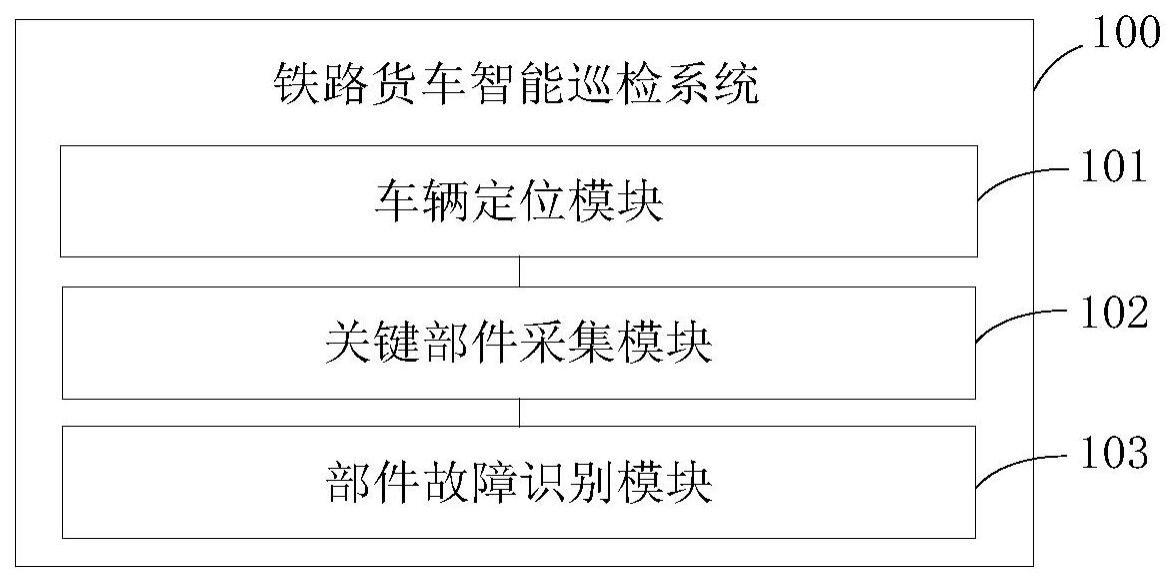
2、第一方面,本发明实施例提供了一种铁路货车智能巡检系统,包括车辆定位模块、关键部件采集模块以及部件故障识别模块:
3、所述车辆定位模块,用于确定车辆的停放位置;
4、所述关键部件采集模块,用于采集车辆图像,对所述车辆图像进行预处理,得到增强图像;对所述增强图像进行关键部件识别,得到关键部件;
5、所述部件故障识别模块,用于利用预构建的识别模型对所述关键部件进行故障检测,得到车辆检测结果。
6、根据本发明的实施例,所述车辆定位模块在执行所述确定车辆的停放位置的功能时,具体用于:
7、获取车辆的侧部部件轮廓数据以及巡检机器人的定位数据,将所述侧部部件轮廓数据与所述定位数据进行匹配,根据匹配的结果生成侧部轮廓曲线;
8、根据所述侧部轮廓曲线识别所述车辆的车轮位置,根据所述车辆位置确定所述车辆的停放位置。
9、根据本发明的实施例,所述关键部件采集模块在执行所述对所述车辆图像进行预处理,得到增强图像的功能时,具体用于:
10、对所述车辆图像进行归一化,得到归一化图像;
11、对所述归一化图像进行伽马变换,得到增强图像。
12、根据本发明的实施例,所述关键部件采集模块在执行所述对所述增强图像进行关键部件识别,得到关键部件的功能时,具体用于:
13、获取多发异常部件以及核心部件,将所述增强图像与所述多发异常部件以及所述核心部件进行比对;
14、根据比对的结果从所述增强图像中选取关键部件。
15、根据本发明的实施例,所述预构建的识别模型包括基于候选区域的二阶段目标检测器或者基于回归的单阶段目标检测器。
16、根据本发明的实施例,所述部件故障识别模块在执行所述利用预构建的识别模型对所述关键部件进行故障检测,得到车辆检测结果的功能时,具体用于:
17、利用所述识别模型中的目标网络以及区域候选网络对所述关键部件进行网络计算,得到部件特征;
18、对所述部件特征进行全连接,得到车辆检测结果。
19、第二方面,本发明实施例提供了一种铁路货车智能巡检方法,所述方法包括:
20、根据车辆的停放位置采集车辆图像;
21、对所述车辆图像进行预处理,得到增强图像;
22、对所述增强图像进行关键部件识别,得到关键部件;
23、利用预构建的识别模型对所述关键部件进行故障检测,得到车辆检测结果。
24、第三方面,本发明实施例提供了一种巡检机器人,应用于铁路货车智能巡检系统,包括底盘结构、机械臂以及工控机:
25、所述底盘结构,包括驱动轮和从动轮、增量编码器以及轮廓激光相机,用于控制所述巡检机器人移动,实现如前第一方面所述的一种铁路货车智能巡检系统的功能;
26、所述机械臂,包括3d尺寸测量单元、高分辨率线阵相机及补偿光源,用于采集关键部件,实现如前第一方面所述的一种铁路货车智能巡检系统的功能;
27、所述工控机,用于识别所述关键部件的故障,实现如前第一方面所述的一种铁路货车智能巡检系统的功能。
28、第四方面,本发明实施例提供了一种电子设备,其包括:
29、处理器;
30、用于存储所述处理器可执行指令的存储器;
31、其中,所述处理器被配置为执行所述指令,以实现如前第一方面所述的一种铁路货车智能巡检系统的功能。
32、第五方面,本发明实施例提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时,实现如前第一方面所述的一种铁路货车智能巡检系统的功能。
33、与现有技术相比,本发明的上述技术方案具有如下有益效果:
34、本发明的实施例通过车辆定位模块对车辆的位置进行准确判断,从而实现车辆侧部关键部件的采集;通过关键部件采集模块对图像进行增强车辆,可以使图像更易于辨识,清晰度更高;通过关键部件识别进而确定关键部位,从而可以实现对货车巡检的检测;通过部件故障识别模块利用预构建的识别模型对所述关键部件进行故障检测,可以提高关键部件的准确识别;通过系统化的巡检可以提高货车状态巡检的效率。
技术特征:
1.一种铁路货车智能巡检系统,包括车辆定位模块、关键部件采集模块以及部件故障识别模块:
2.如权利要求1所述的铁路货车智能巡检系统,其特征在于,所述车辆定位模块在执行所述确定车辆的停放位置的功能时,具体用于:
3.如权利要求1所述的铁路货车智能巡检系统,其特征在于,所述关键部件采集模块在执行所述对所述车辆图像进行预处理,得到增强图像的功能时,具体用于:
4.如权利要求1所述的铁路货车智能巡检系统,其特征在于,所述关键部件采集模块在执行所述对所述增强图像进行关键部件识别,得到关键部件的功能时,具体用于:
5.如权利要求1所述的铁路货车智能巡检系统,其特征在于,所述预构建的识别模型包括基于候选区域的二阶段目标检测器或者基于回归的单阶段目标检测器。
6.如权利要求5所述的铁路货车智能巡检系统,其特征在于,所述部件故障识别模块在执行所述利用预构建的识别模型对所述关键部件进行故障检测,得到车辆检测结果的功能时,具体用于:
7.一种铁路货车智能巡检方法,所述方法包括:
8.一种巡检机器人,应用于铁路货车智能巡检系统,包括底盘结构、机械臂以及工控机:
9.一种电子设备,其包括:
10.一种计算机可读存储介质,其特征在于,其上存储有计算机程序,该程序被处理器执行时,实现如权利要求1至6中任一项所述的铁路货车智能巡检系统的功能。
技术总结
本发明涉及自动化检测技术,揭露了铁路货车智能巡检系统、方法、巡检机器人、设备及介质,所述系统包括:包括车辆定位模块、关键部件采集模块以及部件故障识别模块:其中,所述车辆定位模块,用于确定车辆的停放位置;所述关键部件采集模块,用于采集车辆图像,对所述车辆图像进行预处理,得到增强图像;对所述增强图像进行关键部件识别,得到关键部件;所述部件故障识别模块,用于利用预构建的识别模型对所述关键部件进行故障检测,得到车辆检测结果。本发明可以通过系统化的巡检可以提高货车状态巡检的效率。
技术研发人员:张国彪,焦杨,张锴,李侠,何应德,李华伟
受保护的技术使用者:国能铁路装备有限责任公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!