一种挠度智能检测系统、方法及装置与流程
本发明涉及挠度检测,尤其涉及一种挠度智能检测系统、方法及装置。
背景技术:
1、挠度是指建筑物或其构件在水平方向或竖直方向上的弯曲值,挠度检测是指通过一定的技术、仪器或方法对这种弯曲的程度进行测量和分析。挠度检测是结构性能试验中的一个重要检测项目,在正常使用短期荷载检验值的情况下,依据挠度数值能够判断构件的挠度检验指标是否合格。同时,也可以根据挠度增长的快慢,来判定构件是否有开裂等危险因素。因此,挠度智能检测技术对建筑工程和结构安全具备积极意义。
2、目前,挠度检测的方法包括,激光准直感光法、重力传感器测量法以及光电测量法等。然而,上述测量方法存在一些不足。比如,激光准直感光法只能测量最终的挠度数值,无法体现动态的挠度数值的变化过程;光电测量法的挠度数值受光电成像时环境的影响,检测的数值不够稳定,不能一直保持高精准率,挠度检测效率较低。
技术实现思路
1、本发明提供了一种挠度智能检测系统、方法及装置,以解决现有技术中,挠度检测精准率及效率较低的技术问题。
2、第一方面,提供了一种挠度智能检测系统,包括:挠度智能检测设备、一个或多个标识器,其中,所述挠度智能检测设备包括:
3、设备外壳;
4、相机,用于依次获取多张标识图像,所述标识图像包括一个或多个标识器图像;
5、处理器,所述处理器与所述相机电连接,包括挠度智能检测模型模块,所述挠度智能检测模型模块是基于深度学习算法建立的模型模块,用于根据在多种场景所获取的标识图像,计算一个或多个挠度数值,其中,所述处理器被配置为执行以下方法,包括:
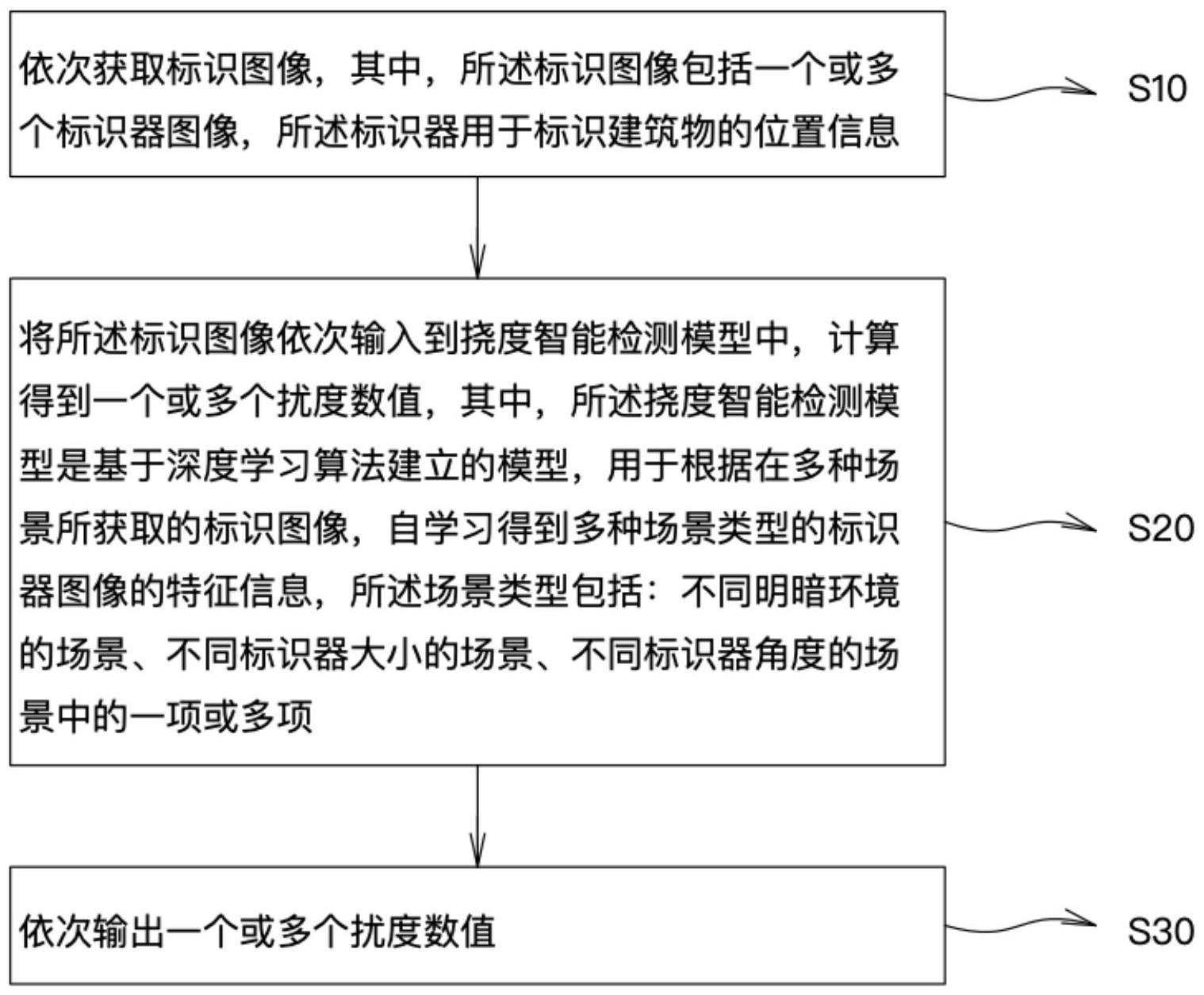
6、依次获取标识图像,其中,所述标识图像包括一个或多个标识器图像,所述标识器用于标识建筑物的位置信息;
7、将所述标识图像依次输入到挠度智能检测模型中,计算得到一个或多个挠度数值,其中,所述挠度智能检测模型是基于深度学习算法建立的模型,用于根据在多种场景所获取的标识图像,自学习得到多种场景类型的标识器图像的特征信息,所述场景类型包括:不同明暗环境的场景、不同标识器大小的场景、不同标识器角度的场景中的一项或多项;
8、依次输出一个或多个挠度数值;
9、操作屏幕显示器,所述操作屏幕显示器与所述处理器电连接,用于操作挠度智能检测程序,并显示一个或多个挠度数值。
10、在一种可能的实现方式中,所述标识器包括:电源板和背光板,所述背光板和所述电源板电连接,所述背光板用于发射一种或多种波段的光线;
11、所述相机包括镜头,所述镜头前端设有滤光片,所述滤光片用于过滤所述背光板发射光线之外的波段范围的光线。
12、在一种可能的实现方式中,所述标识器和所述挠度检测设备均包括无线通信模块,用于同步所述相机的曝光时间和所述背光板的发光时间。
13、在一种可能的实现方式中,多个所述标识器为不同类型的标识器,用于标识不同的建筑物或者同一建筑物的不同部位。
14、第二方面,提供了一种挠度智能检测方法,包括:
15、依次获取标识图像,其中,所述标识图像包括一个或多个标识器图像,所述标识器用于标识建筑物的位置信息;
16、将所述标识图像依次输入到挠度智能检测模型中,计算得到一个或多个挠度数值,其中,所述挠度智能检测模型是基于深度学习算法建立的模型,用于根据在多种场景所获取的标识图像,自学习得到多种场景类型的标识器图像的特征信息,所述场景类型包括:不同明暗环境的场景、不同标识器大小的场景、不同标识器角度的场景中的一项或多项;
17、依次输出一个或多个挠度数值。
18、在一种可能的实现方式中,所述依次获取标识图像之前,还包括:
19、获取多种场景类型的标识图像样本,其中,所述标识图像样本包括一个或多个标识器图像,所述标识器用于标识建筑物的位置信息;
20、根据第一种场景类型的标识图像样本,并基于深度学习算法,训练构建出第一种场景类型的标识器图像的特征信息;
21、根据第二种场景类型的标识图像样本,并基于深度学习算法,训练构建出第二种场景类型的标识器图像的特征信息;
22、依次类推,根据最后一种场景类型的标识图像样本,并基于深度学习算法,训练构建出最后一种场景类型的标识器图像的特征信息,建立形成挠度智能检测模型。
23、在一种可能的实现方式中,所述深度学习算法为fcn算法,所述将所述标识图像依次输入到挠度智能检测模型中,计算得到一个或多个挠度数值,包括:
24、基于fcn算法,依次提取第一标识图像中的标识器图像,并得到第一标识图像中的标识器图像的特征点位置信息;
25、基于fcn算法,依次提取第二标识图像中的标识器图像,并得到第二标识图像中的标识器图像的特征点位置信息;
26、根据第一标识图像中的标识器图像的特征点位置信息和第二标识图像中的标识器图像的特征点位置信息,依次计算得到一个或多个挠度数值。
27、在一种可能的实现方式中,所述依次获取标识图像之前,还包括:
28、将标识器的背光板闪烁频率值和占空比值通过无线通信方式发送给一个或多个标识器。
29、第三方面,提供了一种挠度智能检测装置,包括:
30、标识图像获取模块:用于依次获取标识图像,其中,所述标识图像包括一个或多个标识器图像,所述标识器用于标识建筑物的位置信息;
31、挠度数值计算模块:用于将所述标识图像依次输入到挠度智能检测模型中,计算得到一个或多个挠度数值,其中,所述挠度智能检测模型是基于深度学习算法建立的模型,用于根据在多种场景所获取的标识图像,自学习得到多种场景类型的标识器图像的特征信息,所述场景类型包括:不同明暗环境的场景、不同标识器大小的场景、不同标识器角度的场景中的一项或多项;
32、挠度数值输出模块:用于依次输出一个或多个挠度数值。
33、上述挠度智能检测系统、方法及装置,通过利用多种场景类型的标识图像样本信息,训练构建形成挠度智能检测模型,使得挠度智能检测模型能够在不同场景的标识图像中,快速、精准地识别出一个或多个标识器,并根据标识图像信息,计算得到并输出一个或多个挠度数值。与此同时,本申请中的挠度智能检测系统通过在标识器上设置背光板、在相机的镜头上安装滤光片,并且,所述滤光片能够过滤所述背光板发射光线之外的波段范围的光线,使得挠度检测模型能够快速、准确地识别出标识图像中的一个或多个标识器,进一步提高了标识器的识别率,从而进一步提高了挠度检测的精准率和效率。
技术特征:
1.一种挠度智能检测系统,其特征在于,包括:挠度智能检测设备、一个或多个标识器,其中,所述挠度智能检测设备包括:
2.根据权利要求1所述的挠度智能检测系统,其特征在于,所述标识器包括:电源板和背光板,所述背光板和所述电源板电连接,所述背光板用于发射一种或多种波段的光线;
3.根据权利要求2所述的挠度智能检测系统,其特征在于,所述标识器和所述挠度检测设备均包括无线通信模块,用于同步所述相机的曝光时间和所述背光板的发光时间。
4.根据权利要求1所述的挠度智能检测系统,其特征在于,多个所述标识器为不同类型的标识器,用于标识不同的建筑物或者同一建筑物的不同部位。
5.一种挠度智能检测方法,其特征在于,包括:
6.根据权利要求5所述的方法,其特征在于,所述依次获取标识图像之前,还包括:
7.根据权利要求6所述的方法,其特征在于,所述深度学习算法为fcn算法,所述将所述标识图像依次输入到挠度智能检测模型中,计算得到一个或多个挠度数值,包括:
8.根据权利要求5所述的方法,其特征在于,所述依次获取标识图像之前,还包括:
9.一种挠度智能检测装置,其特征在于,包括:
技术总结
本发明涉及挠度检测技术领域,公开了一种挠度智能检测系统、方法及装置,包括:挠度智能检测设备、一个或多个标识器,其中,所述挠度智能检测设备包括:设备外壳;相机,用于依次拍摄多张标识图像,所述标识图像包括一个或多个标识器图像,所述标识器用于标识建筑物的位置信息;处理器,所述处理器与所述相机电连接,包括挠度智能检测模型模块,所述挠度智能检测模型模块是基于深度学习算法建立的模型模块,用于根据在多种场景所获取的标识图像,计算一个或多个挠度数值;操作屏幕显示器,所述操作屏幕显示器与所述处理器电连接,用于操作挠度检测程序,并显示一个或多个挠度数值。通过该系统,能够提高挠度检测的精准率和效率。
技术研发人员:张冠华,崔凯华,王超,王超,刘志远
受保护的技术使用者:辽宁省交通规划设计院有限责任公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!