一种获取物体距离的数据处理系统的制作方法
本发明涉及光学测量设备,特别是涉及一种获取物体距离的数据处理系统。
背景技术:
1、现有的测距方法大多为激光测距,利用激光测距仪器获取激光发射器与被测物体的距离,通过激光发射器发出激光光束照射被测物体,被测物体对激光进行反射通过透镜照射到接收器上,接收器发出信号,根据接收器发出的信号获取激光发射器与被测物体的距离。
2、但上述方法也存在以下技术问题:
3、激光测距仪的器件的组成位置是固定的,只能满足相对较小范围内的测距需求,在测距的过程中,对接收器发出的信号进行处理,获取激光发射器与被测物体的距离,由于测距仪器受到位置的限制,获取到的激光发射器与被测物体的距离的精准度较低。
技术实现思路
1、针对上述技术问题,本发明采用的技术方案为:
2、一种获取物体距离的数据处理系统,包括:目标测距装置、第一预设电压映射列表、第二预设电压映射列表、处理器和存储有计算机程序的存储器,其中,目标测距装置包括目标发射器、目标凸透镜、目标接收器、目标凸透镜两侧均设置有目标凸透镜控制装置,当计算机程序被处理器执行时,实现以下步骤:
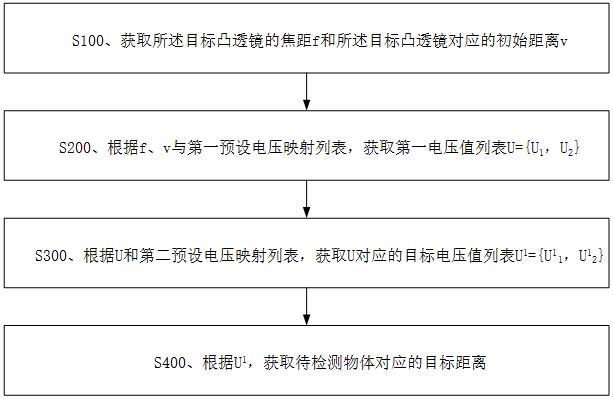
3、s100、获取目标凸透镜的焦距f和目标凸透镜对应的初始距离v,其中,初始距离为当前时间节点下目标凸透镜的中心与目标接收器的中心的垂直距离。
4、s200、根据f、v与第一预设电压映射列表,获取第一电压值列表u={u1,u2},u1为靠近目标发射器的目标凸透镜控制装置中的目标电机的目标电机id对应的第一电压值,u2为远离目标发射器的目标凸透镜控制装置中的目标电机的目标电机id对应的第一电压值。
5、s300、根据u和第二预设电压映射列表,获取u对应的目标电压值列表u1={u11,u12},u11为u1对应的目标电压值,u12为u2对应的目标电压值。
6、s400、根据u1,获取待检测物体对应的目标距离,目标距离为dj1对应的目标电机的电压值为u11,dj2对应的目标电机的电压值为u12时,目标发射器与待检测物体之间的垂直距离,dj1为靠近目标发射器的目标凸透镜控制装置中的目标电机的目标电机id,dj2为远离目标发射器的目标凸透镜控制装置中的目标电机的目标电机id。
7、本发明至少具有以下有益效果:
8、本发明提供了一种获取物体距离的数据处理系统,包括目标测距装置、第一预设电压映射列表、第二预设电压映射列表、处理器和存储有计算机程序的存储器,当计算机程序被处理器执行时,实现以下步骤:获取目标凸透镜的焦距和目标凸透镜对应的初始距离;获取第一电压值列表;获取目标电压值列表;获取待检测物体对应的目标距离;可知,本发明在目标测距装置上设置目标凸透镜控制装置,通过控制目标凸透镜控制装置中目标电机的电压值调节可伸缩杆伸出的长度,以使目标凸透镜进行侧倾或沿光轴光向进行移动。如此,使得获取物体距离的数据处理系统可以满足各种范围的测距需求,同时通过电压映射列表获取电压值,来进行测距,可以提高测距的精准度。
技术特征:
1.一种获取物体距离的数据处理系统,其特征在于,所述系统包括:目标测距装置、第一预设电压映射列表、第二预设电压映射列表、处理器和存储有计算机程序的存储器,其中,所述目标测距装置包括目标发射器、目标凸透镜、目标接收器、目标凸透镜两侧均设置有目标凸透镜控制装置,当计算机程序被所述处理器执行时,实现以下步骤:
2.根据权利要求1所述的获取物体距离的数据处理系统,其特征在于,所述目标电机与所述处理器通信连接。
3.根据权利要求1所述的获取物体距离的数据处理系统,其特征在于,在s200步骤中,包括如下步骤:
4.根据权利要求3所述的获取物体距离的数据处理系统,其特征在于,在s300步骤中,包括如下步骤:
5.根据权利要求3所述的获取物体距离的数据处理系统,其特征在于,在s202步骤中,e中e1x1与e2x1均不相同。
6.根据权利要求4所述的获取物体距离的数据处理系统,其特征在于,在s301步骤中,f中f1y1与f2y1均不相同。
7.根据权利要求4所述的获取物体距离的数据处理系统,其特征在于,f2y1-f1y1≠e2x1-e1x1。
8.根据权利要求1所述的获取物体距离的数据处理系统,其特征在于,所述目标凸透镜设置在所述待检测物体与所述目标接收器之间。
9.根据权利要求1所述的获取物体距离的数据处理系统,其特征在于,所述目标凸透镜控制装置包括目标电机、目标电机的可伸缩杆、支撑杆、顶杆、弹簧。
10.根据权利要求9所述的获取物体距离的数据处理系统,其特征在于,所述目标凸透镜控制装置中所述目标电机、所述目标电机的可伸缩杆、所述顶杆和所述弹簧设置在一条直线上。
技术总结
本发明提供了一种获取物体距离的数据处理系统,包括目标测距装置、第一预设电压映射列表、第二预设电压映射列表、处理器和存储有计算机程序的存储器,当计算机程序被处理器执行时,实现以下步骤:获取目标凸透镜的焦距和目标凸透镜对应的初始距离;获取第一电压值列表;获取目标电压值列表;获取待检测物体对应的目标距离;可知,本发明在目标测距装置上设置目标凸透镜控制装置,通过控制目标凸透镜控制装置中目标电机的电压值调节可伸缩杆伸出的长度,以使目标凸透镜进行侧倾或沿光轴光向进行移动。如此,使得获取物体距离的数据处理系统可以满足各种范围的测距需求,同时通过电压映射列表获取电压值,来进行测距,可以提高测距的精准度。
技术研发人员:张善,冀明明
受保护的技术使用者:天津宜科自动化股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!