一种自动扫描型激光测距系统的制作方法
本发明涉及测距,具体涉及一种自动扫描型激光测距系统。
背景技术:
1、目前对车辆或船舶速度/位移检测的方案主要包括:红外光电开关(传感器)方案、激光测距方案、连续波(lfmcw)测速测距雷达方案、gps(global positioning system)全球定位系统方案、图像识别技术方案和射频识别技术方案。
2、红外光电开关(传感器)方案抗干扰能力不强,测量距离有限,也不能连续动态测量车辆或船舶在测量区间内的全过程的速度和位移。
3、激光测距方案没有在船闸或升船机检测空间狭小、近距、慢速等船闸或升船机特殊场景内应用的实例。
4、连续波测速测距雷达方案中,因为雷达波沿直线传播的特性,以及船舶体积和形状的不同对雷达波的反射强度不同,会导致测量结果出现较大偏差,特别是测速雷达安装位置与检测目标的夹角关系,会导致目标对象的位置测量结果出现较大偏差,另外,雷达信号会受到周围无线电波的干扰,导致目标车辆(船舶)的速度测量读数不稳定。
5、gps的定位精度受多种因素的限制,无论是电离层的天气状态,还是附近建筑物以及地面情况都可能造成信号延迟,不是一种对目标对象近距离直接测量方案,这也限制了gps测速的应用。
6、图像识别技术方案对被测量物体外形和场景的不变度要求高,测量环境要求比较严格,受现场光照影响较大,摄像头安装地点比较受限,目标对象边界图像识别技术对距离信息的提出存在一定困难,位置检测精度不高,没有在检测空间狭小、船舶形状多变、背景情况复杂等船闸或升船机特殊场景内应用的实例。
7、射频识别技术方案要求所有通航船舶都安装rfid电子标签,推广难度较大。
8、可知车辆或船舶速度(位移)检测技术手段有多种,其技术性能各有特点,每种技术手段的应用场景的针对性都很强,但这些技术手段目前在船闸或升船机上均无成熟的工程应用实例,给工程建设的实际应用带来了很大的不确定性。
技术实现思路
1、针对现有技术中存在的缺陷,本发明的目的在于提供一种自动扫描型激光测距系统。本发明能高精度的确定移动目标在测距空间内移动时的速度和/或位置,可在检测到移动目标时自动开启扫描,没有移动目标通过时停止扫描,提高系统寿命和可靠性。
2、为解决上述技术问题,本发明通过下述技术方案实现:
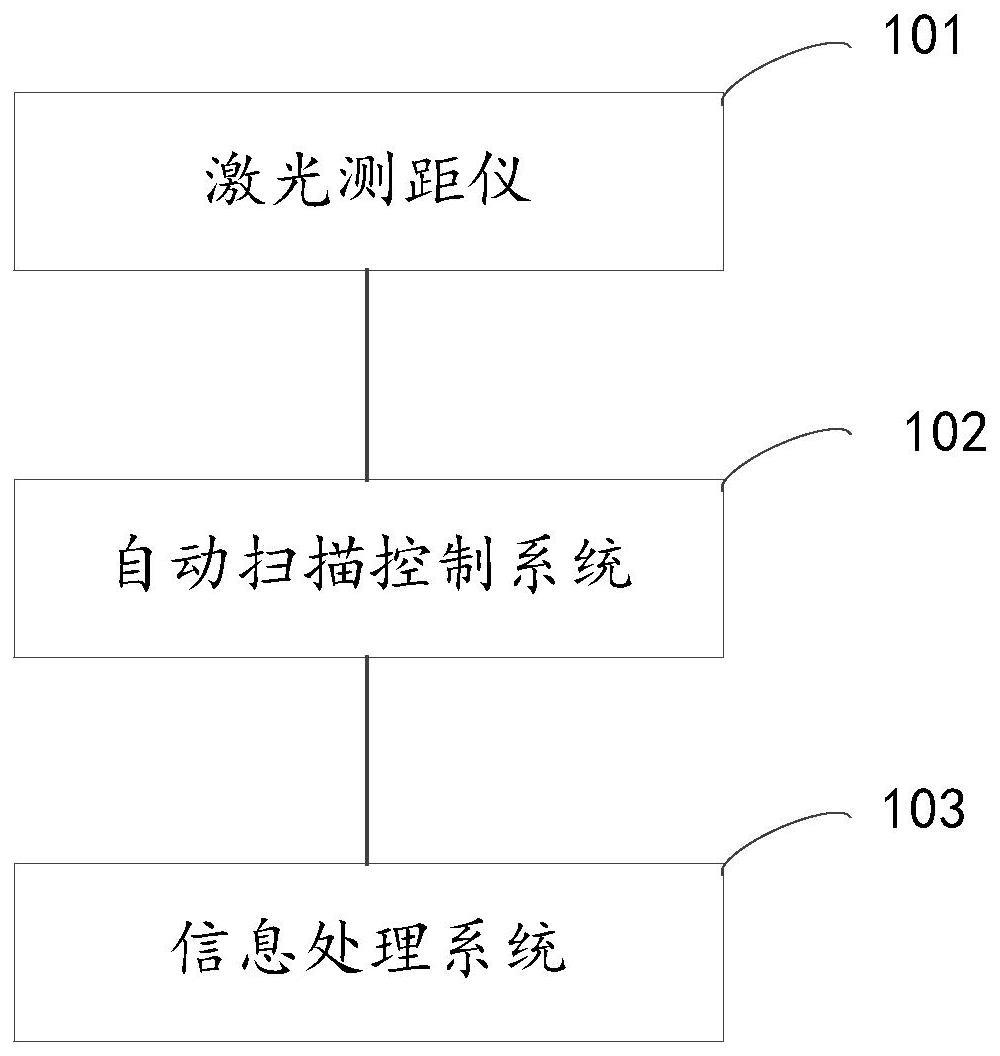
3、一种自动扫描型激光测距系统,包括:激光测距仪、自动扫描控制系统和信息处理系统;
4、所述激光测距仪设置于移动目标沿移动方向的水平一侧,在所述自动扫描控制系统的控制下实时测量距离值;
5、所述激光测距仪测量的所述距离值变化超过设定阈值时,所述自动扫描控制系统控制所述激光测距仪水平摆动以减小所述激光测距仪的角度,所述激光测距仪的角度为所述激光测距仪的出射激光与所述移动方向的夹角;
6、所述信息处理系统根据两次所述距离值变化超过设定阈值时的时刻和激光测距仪的角度以及所述移动目标与所述激光测距仪的水平距离,确定所述移动目标的移动速度和/或位置。
7、本发明提供的一种自动扫描型激光测距系统,能高精度的确定移动目标在测距空间内移动时的速度和/或位置,并且该自动扫描控制系统可在检测到移动目标时自动开启扫描,没有移动目标通过时停止扫描,提高系统寿命和可靠性。
8、在上述技术方案的基础上,本发明还可以作出如下改进。
9、可选的,根据测距空间在水平方向的宽度以及所述激光测距仪的角度范围设置所述激光测距仪的数量,各个所述激光测距仪等距离设置,使所述移动目标处于至少一个的所述激光测距仪的监测范围内;水平方向为水平面上与移动方向垂直的方向。
10、可选的,各个所述激光测距仪的间距的最大值为:d=2lmax×tanθmax;其中,lmax为测距空间水平方向的宽度,θmax为激光测距仪与水平方向的最大夹角,水平方向为水平面上与移动方向垂直的方向。
11、可选的,所述测距空间的两端分别设置有所述激光测距仪,根据最先测量到所述距离值变小时的所述激光测距仪的位置确定所述移动目标的所述移动方向,根据所述移动方向确定各个所述激光测距仪的初始角度。
12、可选的,所述移动目标的移动速度为:
13、
14、l1为移动目标与激光测距仪的水平距离,t1和t2分别为两次距离值变化超过设定阈值时的时刻,θ1和θ2分别为两次距离值变化超过设定阈值时激光测距仪的出射激光在水平面的投影方向与水平方向的夹角。
15、可选的,所述移动目标的中轴线与激光测距仪的水平距离l1=l0×cosθ0,l0为激光测距仪与水平方向的夹角为θ0时激光测距仪测得的距离。
16、可选的,所述信息处理系统还包括:
17、计算所述移动目标与终点的实时距离为:s=n×l-l×sinθ+x+δs;
18、n为当前激光测距仪后还剩下的激光测距仪数量,l为激光测距仪的间距,θ为当前激光测距仪与水平方向的夹角,l为当前激光测距仪测得的距离,x为终点处激光测距仪与终点的距离,δs为系统误差。
19、可选的,所述测距空间的两端分别设置的两个所述激光测距仪的高度与所述移动目标的高度相同。
20、可选的,确定最先测量到所述距离值变小时的所述激光测距仪为第一激光测试仪,所述信息处理系统对所述第一激光测试仪测量到的所述移动目标的沿移动方向的运行轨迹进行线性拟合,根据所述运行轨迹确定所述移动目标与所述测距空间设置有所述激光测距仪的一侧的垂直距离为l',调整其它各个所述激光测距仪的俯仰角度为:α=arctanl'/d,d为其它各个所述激光测距仪的安装高度。
21、相比于现有技术,本发明所提及的一种自动扫描型激光测距系统主要有如下优点:
22、本发明提供的一种自动扫描型激光测距系统,利用激光测距仪实时测距,当没有移动目标遮挡时,所有激光测距仪所测的是到对侧的距离,将不同角度下的该距离写入一组固定数组中保存下来作为参考。当有移动目标进行遮挡时,激光测距仪所测的是到移动目标的距离,两者之间存在较大差异,当激光测距仪检测到该差异的时刻即代表有移动目标经过,记录当前时刻和激光测距仪的角度,随即在自动扫描控制系统的控制下向船舶前进方向旋转一定角度,当该激光测距仪所测距离与无移动目标时再次产生较大差异时,再次记录时间和激光测距仪的角度。根据激光测距仪的旋转角度和移动目标与激光测距仪的水平距离即可确定移动目标在这段时间内的运动距离,进一步确定该移动目标的速度和位置。自动扫描控制系统可在检测到移动目标时自动开启扫描,没有移动目标通过时停止扫描,提高系统寿命和可靠性。
技术特征:
1.一种自动扫描型激光测距系统,其特征在于,所述测距系统包括:激光测距仪、自动扫描控制系统和信息处理系统;
2.根据权利要求1所述的自动扫描型激光测距系统,其特征在于,根据测距空间在水平方向的宽度以及所述激光测距仪的角度范围设置所述激光测距仪的数量,各个所述激光测距仪等距离设置,使所述移动目标处于至少一个的所述激光测距仪的监测范围内;水平方向为水平面上与移动方向垂直的方向。
3.根据权利要求2所述的自动扫描型激光测距系统,其特征在于,各个所述激光测距仪的间距的最大值为:d=2lmax×tanθmax;其中,lmax为测距空间水平方向的宽度,θmax为激光测距仪与水平方向的最大夹角,水平方向为水平面上与移动方向垂直的方向。
4.根据权利要求2所述的自动扫描型激光测距系统,其特征在于,所述测距空间的两端分别设置有所述激光测距仪,根据最先测量到所述距离值变小时的所述激光测距仪的位置确定所述移动目标的所述移动方向,根据所述移动方向确定各个所述激光测距仪的初始角度。
5.根据权利要求1所述的自动扫描型激光测距系统,其特征在于,所述移动目标的移动速度为:
6.根据权利要求5所述的自动扫描型激光测距系统,其特征在于,所述移动目标的中轴线与激光测距仪的水平距离l1=l0×cosθ0,l0为激光测距仪与水平方向的夹角为θ0时激光测距仪测得的距离。
7.根据权利要求2-4任一项所述的自动扫描型激光测距系统,其特征在于,所述信息处理系统还包括:
8.根据权利要求4所述的自动扫描型激光测距系统,其特征在于,所述测距空间的两端分别设置的两个所述激光测距仪的高度与所述移动目标的高度相同。
9.根据权利要求8所述的自动扫描型激光测距系统,其特征在于,确定最先测量到所述距离值变小时的所述激光测距仪为第一激光测试仪,所述信息处理系统对所述第一激光测试仪测量到的所述移动目标的沿移动方向的运行轨迹进行线性拟合,根据所述运行轨迹确定所述移动目标与所述测距空间设置有所述激光测距仪的一侧的垂直距离为l',调整其它各个所述激光测距仪的俯仰角度为:α=arctan l'/d,d为其它各个所述激光测距仪的安装高度。
技术总结
本发明公开一种自动扫描型激光测距系统,激光测距仪设置于移动目标沿移动方向的水平一侧,在自动扫描控制系统的控制下实时测量距离值;激光测距仪测量的距离值变化超过设定阈值时,自动扫描控制系统控制激光测距仪水平摆动以减小激光测距仪的角度,激光测距仪的角度为激光测距仪的出射激光与移动方向的夹角;信息处理系统根据两次距离值变化超过设定阈值时的时刻和激光测距仪的角度以及移动目标与激光测距仪的水平距离,确定移动目标的移动速度和/或位置,能高精度的确定移动目标在测距空间内移动时的速度和/或位置,可在检测到移动目标时自动开启扫描,没有移动目标通过时停止扫描,提高系统寿命和可靠性。
技术研发人员:王成明,熊为军,崔磊,周强,方焱郴,贺徽,刘阳
受保护的技术使用者:长江勘测规划设计研究有限责任公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!