一种2D激光反光柱定位强反射物体干扰剔除算法的制作方法
本申请涉及激光反光柱定位,尤其涉及一种2d激光反光柱定位强反射物体干扰剔除算法。
背景技术:
1、随着工业自动化和智能化的发展,自动导引运输车(agv)在物流运输领域的运用越来越广泛。agv的定位方式也越来越成熟。对于环境不规整,变化较大的场景,使用反光柱定位更具优势。但强反射物体会对反光柱定位造成极大的干扰,故本发明用来解决强反光物体对反光柱定位造成的干扰,提升反光柱定位对应用环境的适应。
技术实现思路
1、本申请提出了一种2d激光反光柱定位强反射物体干扰剔除算法,具备剔除强反射体的优点,用以解决上述背景技术提出的问题。
2、为达到上述目的,本申请采用如下技术方案:一种2d激光反光柱定位强反射物体干扰剔除算法,包括:
3、(1)异常标记
4、建立反光柱电子地图,判断扫描到的反光柱是否是强反射体形成的,如果是则将其标记为异常反光柱;
5、(2)区域剔除
6、以雷达为圆心o,雷达正前方为0度,逆时针设定起始方向a与终止方向b,半径r,在半径为r的扇形oab中,如果识别到存在异常反光柱,则将该异常反光柱其剔除。
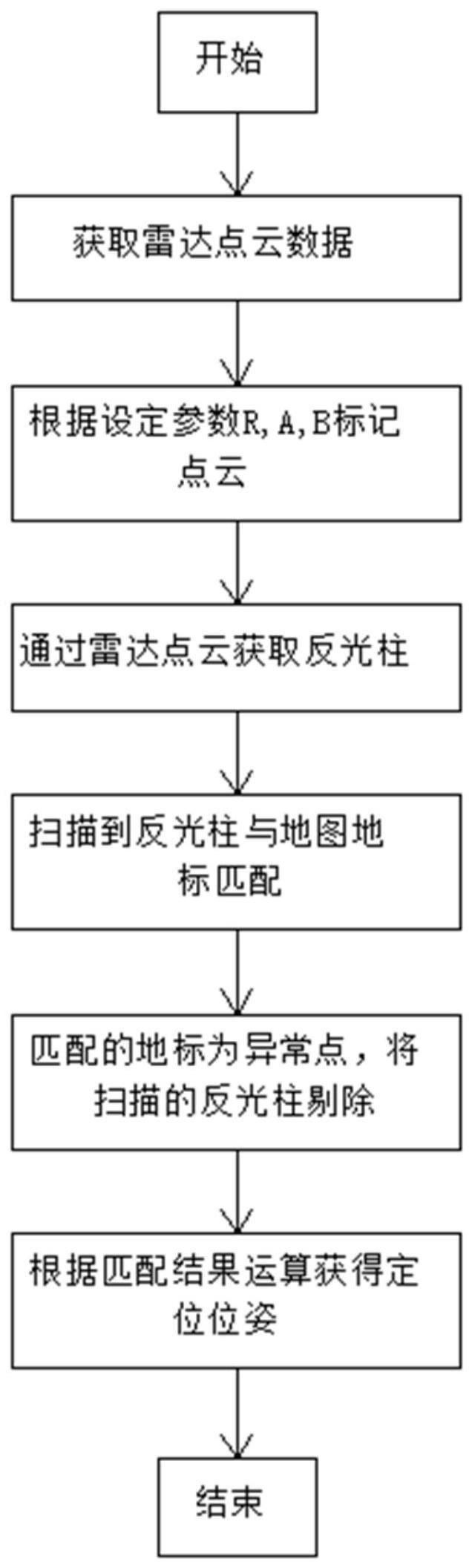
7、进一步,所述区域剔除的具体步骤如下:
8、获取雷达点云数据;
9、根据设定参数r,a,b标记点云;
10、通过雷达点云获取反光柱;
11、扫描到反光柱与地图地标匹配;
12、匹配的地标为异常点,将扫描的反光柱剔除;
13、根据匹配结果运算获得定位位姿。
14、进一步,算法流程为:
15、步骤一、设置最大扫描范围max_dis,将激光点云中距离大于max_dis的点云标记为abnormal;
16、步骤二、设置激光点云的有效反射强度区间,最小反射强度l1,最大反射强度l2,将超出该反射强度区间的点云标记为abnormal;
17、步骤三、设置起始方向a,终止方向b,半径r,将在设定扇形范围内的点云数据标记为abnormal;
18、步骤四、设反光柱的距离与反射强度的关系函数为dis=f(l),dis为反光柱到激光雷达的距离,l为反光强度;
19、步骤五、根据激光点云中点云的距离和反光强度与f(l)的关系计算出反光柱;
20、步骤六、将误识别的反光柱标记为异常反光柱。
21、进一步,应用于反光柱和雷达,所述反光柱的外壁上设有反光层,所述反光层包括强反光面和弱反光面,所述反光柱的顶部设有信号接收器,所述反光柱的底端连接有转座,所述转座的底端连接有识别动作装置。
22、进一步,所述识别动作装置包括箱体、电机和识别控制器,所述电机和识别控制器固定连接在箱体的内部,所述信号接收器和电机均与识别控制器相连接,所述转座为轴承,所述转座的外环与反光柱相连接,所述转座的内环与箱体相连接。
23、进一步,所述雷达的控制系统包括定位模块和识别模块,所述识别模块包括固定强反射体识别单元、移动强反射体识别单元和反射强度对比单元,所述定位模块根据正常反光柱的位置获得雷达的定位位姿,所述识别模块用于识别、剔除强反射体;所述固定强反射体识别单元用于判断反光体为固定位置的强反射体,所述移动强反射体识别单元用于判断反光体为移动的强反射体,所述反射强度对比单元用于根据反射激光的判断反射体的反射强度。
24、进一步,所述区域剔除的具体步骤如下:
25、获取雷达点云数据;
26、根据设定参数r,a,b标记点云;
27、通过雷达点云获取反光柱;
28、扫描到反光柱与地图地标匹配;
29、判断匹配的地标是否为异常点,若是,则判断该反光柱为固定强反光柱,并将扫描的反光柱剔除;
30、若否,则雷达向反光柱方向发射识别信号,然后雷达再次发射激光,获取反射激光,并与第一次反射激光的强度进行比较;若反射强度差不符合预设阈值,则判断该反光柱为移动强反光柱,将扫描的反光柱剔除;若否,则判断该反光柱为正常的反光柱;
31、最后根据匹配结果运算获得定位位姿。
32、1、本申请提供的一种2d激光反光柱定位强反射物体干扰剔除算法,根据反光柱形成原理,标记强反射体为异常点和设定范围进行剔除异常反光柱,有效地防止强反射体,铝合金、玻璃等,对反光柱定位的干扰,大大提升反光柱定位对应用环境的适应对强反射体作出有效的剔除,稳定了反光柱定位位姿输出,提高agv小车定位的准确性。
33、2、本申请提供的一种d激光反光柱定位强反射物体干扰剔除算法,通过独特的反光柱和雷达的结构,通过雷达向信号接收器发射识别信号,并通过电机控制反光柱旋转从而改变强反光面、弱反光面位置,以使得雷达的接收的反射激光的被反射强度不同且反射强度差值固定,从而判断该反射体为移动强反射体或者正常的反光柱,由此实现识别移动强反射体的功能,进一步提高agv小车定位的准确性。
技术特征:
1.一种2d激光反光柱定位强反射物体干扰剔除算法,其特征在于,包括:
2.根据权利要求1所述的一种2d激光反光柱定位强反射物体干扰剔除算法,其特征在于,所述区域剔除的具体步骤如下:
3.根据权利要求1所述的一种2d激光反光柱定位强反射物体干扰剔除算法,其特征在于,算法流程为:
4.根据权利要求1所述的一种2d激光反光柱定位强反射物体干扰剔除算法,其特征在于,应用于反光柱(1)和雷达(2),所述反光柱(1)的外壁上设有反光层(3),所述反光层(3)包括强反光面(301)和弱反光面(302),所述反光柱(1)的顶部设有信号接收器(4),所述反光柱(1)的底端连接有转座(5),所述转座(5)的底端连接有识别动作装置(6)。
5.根据权利要求4所述的一种2d激光反光柱定位强反射物体干扰剔除算法,其特征在于,所述识别动作装置(6)包括箱体(601)、电机(602)和识别控制器(603),所述电机(602)和识别控制器(603)固定连接在箱体(601)的内部,所述信号接收器(4)和电机(602)均与识别控制器(603)相连接,所述转座(5)为轴承,所述转座(5)的外环与反光柱(1)相连接,所述转座(5)的内环与箱体(601)相连接。
6.根据权利要求1所述的一种2d激光反光柱定位强反射物体干扰剔除算法,其特征在于,所述雷达(2)的控制系统包括定位模块(201)和识别模块(202),所述识别模块(202)包括固定强反射体识别单元(221)、移动强反射体识别单元(222)和反射强度对比单元(223),所述定位模块(201)根据正常反光柱的位置获得雷达(2)的定位位姿,所述识别模块(202)用于识别、剔除强反射体;所述固定强反射体识别单元(221)用于判断反光体为固定位置的强反射体,所述移动强反射体识别单元(222)用于判断反光体为移动的强反射体,所述反射强度对比单元(223)用于根据反射激光的判断反射体的反射强度。
7.根据权利要求5所述的一种2d激光反光柱定位强反射物体干扰剔除算法,其特征在于,所述区域剔除的具体步骤如下:
技术总结
本申请公开了一种2D激光反光柱定位强反射物体干扰剔除算法,包括建立反光柱电子地图,判断扫描到的反光柱是否是强反射体形成的,如果是则将其标记为异常反光柱;以雷达为圆心O,雷达正前方为0度,逆时针设定起始方向A与终止方向B,半径R,在半径为R的扇形OAB中,如果识别到存在异常反光柱,则将该异常反光柱其剔除。本申请提供的一种2D激光反光柱定位强反射物体干扰剔除算法,根据反光柱形成原理,标记强反射体为异常点和设定范围进行剔除异常反光柱,有效防止强反射体,对反光柱定位的干扰,大大提升反光柱定位对应用环境的适应对强反射体作出有效的剔除,稳定反光柱定位位姿输出,提高AGV小车定位的准确性。
技术研发人员:项卫锋,张祥,段书杰,蔡宝京,汪磊
受保护的技术使用者:安徽宇锋智能科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!