基于跟踪扫描系统的三维扫描方法和跟踪扫描系统与流程
本申请涉及三维扫描,特别是涉及基于跟踪扫描系统的三维扫描方法和跟踪扫描系统。
背景技术:
1、目前,在跟踪式三维扫描过程中,往往在扫描头对被测对象进行扫描之前,需要人工从跟踪头处观察被测对象的位置,来预估被测对象在跟踪头视野中的位置是否符合跟踪要求,进而基于符合跟踪要求的位置完成对被测对象的跟踪式三维扫描。该种现有方式通过人眼预估位置,较为依赖人的经验,且需要反复尝试和调节跟踪头,以预估被测对象与跟踪装置的相对位置是否符合跟踪要求,导致跟踪式三维扫描的整体效率较低。
2、针对相关技术中存在跟踪式三维扫描的整体效率较低的问题,目前还没有提出有效的解决方案。
技术实现思路
1、在本实施例中提供了一种基于跟踪扫描系统的三维扫描方法和跟踪扫描系统,以解决相关技术中跟踪式三维扫描的整体效率较低的问题。
2、第一个方面,在本实施例中提供了一种基于跟踪扫描系统的三维扫描方法,其中,所述跟踪扫描系统包括跟踪装置和扫描装置,所述方法包括:
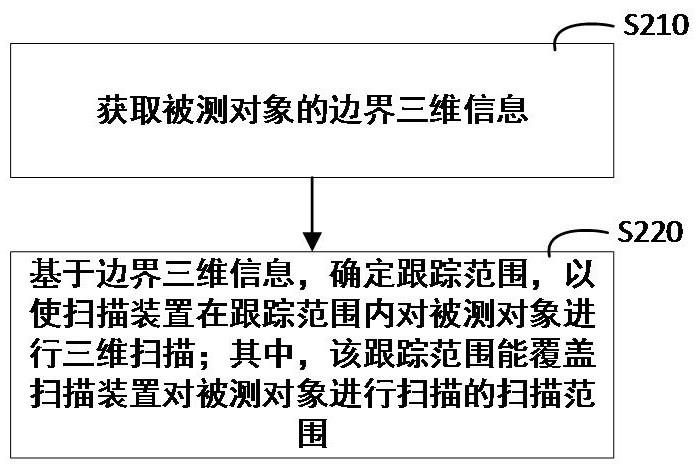
3、获取被测对象的边界三维信息;
4、基于所述边界三维信息,确定跟踪范围,以使所述扫描装置在所述跟踪范围内对所述被测对象进行三维扫描;其中,所述跟踪范围能覆盖所述扫描装置对所述被测对象进行扫描的扫描范围。
5、在其中的一些实施例中,所述跟踪扫描系统还包括图案投影器;所述获取被测对象的边界三维信息,包括:
6、基于所述图案投影器对所述被测对象投射的特征图案,对所述被测对象进行预扫描,得到所述被测对象的边界三维信息。
7、在其中的一些实施例中,所述特征图案为激光线,所述跟踪扫描系统还包括转动机构,所述图案投影器通过转动机构驱动转动,并在转动过程中向所述被测对象投射特征图案。
8、在其中的一些实施例中,所述基于所述边界三维信息,确定跟踪范围,包括:
9、基于所述边界三维信息,确定当前跟踪范围;
10、在确定所述当前跟踪范围覆盖所述扫描装置对所述被测对象进行扫描的扫描范围的情况下,将所述当前跟踪范围确定为跟踪范围。
11、在其中的一些实施例中,所述基于所述边界三维信息,确定跟踪范围,包括:
12、基于所述边界三维信息,确定当前跟踪范围;
13、在确定所述当前跟踪范围未覆盖所述扫描装置对所述被测对象的扫描范围的情况下,调节所述当前跟踪范围,直至所述当前跟踪范围覆盖所述扫描装置对所述被测对象进行扫描的扫描范围;
14、将调节后的所述当前跟踪范围确定为跟踪范围。
15、在其中的一些实施例中,所述调节所述当前跟踪范围,包括:
16、调节所述跟踪装置的跟踪位置;
17、和/或,
18、调节所述跟踪装置的数量。
19、在其中的一些实施例中,所述方法还包括:
20、获取所述预扫描过程得到所述被测对象的第一扫描数据;
21、输出对所述扫描装置的跟踪结果,以使控制端基于所述跟踪结果以及所述扫描装置对所述被测对象的扫描结果,得到所述被测对象的第二扫描数据;
22、基于所述第一扫描数据和所述第二扫描数据,得到所述被测对象的目标扫描数据。
23、第二个方面,在本实施例中提供了一种跟踪扫描系统,包括:
24、扫描装置,用于获取被测对象表面的三维数据,并生成扫描结果;
25、跟踪装置,用于执行上述第一个方面所述的基于跟踪扫描系统的三维扫描方法。
26、在其中的一些实施例中,所述跟踪扫描系统还包括图案投影器,所述跟踪装置包括图像传感器;
27、所述图案投影器,用于对所述被测对象投射特征图案;
28、所述图像传感器,用于基于所述图案投影器对所述被测对象投射的特征图案,对所述被测对象进行预扫描,得到所述被测对象的边界三维信息;还用于对所述扫描装置的位姿进行跟踪。
29、在其中的一些实施例中,所述跟踪扫描系统还包括转动机构;
30、所述转动机构,用于驱动所述图案投影器转动,以使所述图案投影器投射的特征图案扫过所述跟踪范围中的所述被测对象。
31、在其中的一些实施例中,所述图案投影器和所述转动机构均设置于所述跟踪装置上。
32、与相关技术相比,在本实施例中提供的基于跟踪扫描系统的三维扫描方法和跟踪扫描系统,通过获取被测对象的边界三维信息;基于边界三维信息,确定跟踪范围,以使扫描装置在跟踪范围内对被测对象进行三维扫描;其中,跟踪范围能覆盖扫描装置对被测对象进行扫描的扫描范围。其能够获取被测对象的边界三维信息,并基于被测对象的边界三维信息确定当前的跟踪范围能够满足对该被测对象进行跟踪式扫描的要求,对跟踪范围的确定更加直观、准确,从而能够避免对跟踪装置的反复调节,进而能够提高跟踪式三维扫描整体的效率。
33、本申请的一个或多个实施例的细节在以下附图和描述中提出,以使本申请的其他特征、目的和优点更加简明易懂。
技术特征:
1.一种基于跟踪扫描系统的三维扫描方法,其中,所述跟踪扫描系统包括跟踪装置和扫描装置,其特征在于,所述方法包括:
2.根据权利要求1所述的三维扫描方法,其特征在于,所述跟踪扫描系统还包括图案投影器;所述获取被测对象的边界三维信息,包括:
3.根据权利要求2所述的三维扫描方法,其特征在于,所述特征图案为激光线,所述跟踪扫描系统还包括转动机构,所述图案投影器通过转动机构驱动转动,并在转动过程中向所述被测对象投射特征图案。
4.根据权利要求1所述的三维扫描方法,其特征在于,所述基于所述边界三维信息,确定跟踪范围,包括:
5.根据权利要求1所述的三维扫描方法,其特征在于,所述基于所述边界三维信息,确定跟踪范围,包括:
6.根据权利要求5所述的三维扫描方法,其特征在于,所述调节所述当前跟踪范围,包括:
7.根据权利要求2或权利要求3中任一项所述的三维扫描方法,其特征在于,所述方法还包括:
8.一种跟踪扫描系统,其特征在于,包括:
9.根据权利要求8所述的跟踪扫描系统,其特征在于,所述跟踪扫描系统还包括图案投影器,所述跟踪装置包括图像传感器;
10.根据权利要求9所述的跟踪扫描系统,其特征在于,所述跟踪扫描系统还包括:
11.根据权利要求10所述的跟踪扫描系统,其特征在于,所述图案投影器和所述转动机构均设置于所述跟踪装置上。
技术总结
本申请涉及一种基于跟踪扫描系统的三维扫描方法和跟踪扫描系统,其中,该三维扫描方法包括:获取被测对象的边界三维信息;基于边界三维信息,确定跟踪范围,以使扫描装置在跟踪范围内对被测对象进行三维扫描;其中,该跟踪范围能覆盖扫描装置对被测对象进行扫描的扫描范围。其能够获取被测对象的边界三维信息,并基于被测对象的边界三维信息确定当前的跟踪范围能够满足对该被测对象进行跟踪式扫描的要求,对跟踪范围的确定更加直观、准确,从而能够避免对跟踪装置的反复调节,进而能够提高跟踪式三维扫描整体的效率。
技术研发人员:王江峰,戴明,郑俊,陈尚俭
受保护的技术使用者:思看科技(杭州)股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!