一种卫星/惯性组合导航半实物仿真时序修正方法与流程
本发明属于组合导航制导武器系统,具体涉及一种卫星/惯性组合导航半实物仿真时序修正方法,尤其涉及采用卫星/惯性组合导航制导的武器系统开展半实物仿真试验。
背景技术:
1、当前很多武器装备采用卫星+惯性组合导航制导体制,需要借助半实物仿真手段对其性能指标进行充分地考核验证。传统的卫星/惯性组合导航半实物仿真方法是,将惯导安装到三轴转台上,利用三轴转台模拟制导武器飞行过程中的姿态变化,将卫星导航接收机放置在卫星信号模拟器前的适当位置,利用卫星信号模拟器为卫星导航接收机提供实时的导航定位信息,最后,组合导航装置中的组合导航算法模块对惯导和卫星导航接收机所敏感到的信息进行组合解算,控制制导武器按规划弹道飞行。在仿真过程中,传统的组合导航半实物仿真方法不对整个仿真链路的时序进行修正,这样做存在着以下弊端:
2、制导武器在实际飞行过程中卫星和惯导所敏感到的应是同一时刻映射下的制导武器位置、速度和加速度等信号,而在半实物仿真中惯导所敏感到的信号为经仿真计算机—>加速度信号注入装置—>三轴转台响应后时刻的位置、速度和加速度信号(惯导仿真链路);卫星导航接收机所敏感到的信号为经仿真计算机—>射频矩阵开关—>卫星信号模拟器响应后时刻的位置、速度和加速度信号(卫星仿真链路)。由于这两条链路上信号传播的时间不同,导致组合导航算法组合解算时所使用的位置、速度和加速度信息不一致,从而引入了额外的解算误差,使得解算出的导航定位信息不准确,仿真精度差,无法对武器系统的性能指标进行高置信度地考核验证。
技术实现思路
1、(一)要解决的技术问题
2、本发明要解决的技术问题是:如何提供一种卫星/惯性组合导航半实物仿真时序修正方法,以解决传统的卫星/惯性组合导航半实物仿真中存在的惯导仿真链路与卫星仿真链路时序不匹配,导航定位信息解算不准确,仿真精度低的弊端。
3、(二)技术方案
4、为了解决上述技术问题,本发明提供一种卫星/惯性组合导航半实物仿真时序修正方法,所述方法用于消除惯导仿真链路与卫星仿真链路执行过程中的时序差异,所述方法包括:
5、步骤1:计算惯导仿真链路时间;
6、步骤2:计算卫星仿真链路时间;
7、步骤3:计算两条链路时间差;
8、步骤4:对齐两条链路时序;
9、步骤5:组合导航解算。
10、其中,所述步骤1中,计算惯导仿真链路时间的过程为使用示波器测量出惯导仿真链路执行需要的时间tg。
11、其中,所述步骤2中,计算卫星仿真链路时间的过程为使用示波器测量出卫星仿真链路执行需要的时间tw。
12、其中,所述步骤3中,计算两条链路时间差的过程为计算出两条链路的时间差twg=tw-tg。
13、其中,所述步骤4中,对齐两条链路时序的过程为:
14、当试验总控系统发出击发指令后,仿真计算机将计算出的弹道信号立即发送给射频矩阵开关,射频矩阵开关选通对应的卫星信号发射天线所在链路,再将经处理后的弹道信息传送给卫星信号模拟器;
15、同时,仿真计算机将计算出的x、y、z轴加速度信号延迟twg时间后再传送给加速度信号注入装置,加速度信号注入装置对x、y、z轴加速度信号进行接口转换,再将这些信号注入给惯导,此时惯导仿真链路执行需要的时间与卫星仿真链路执行需要的时间严格对齐。
16、其中,所述步骤5中,组合导航解算的过程为:
17、采用组合导航装置中预设定的组合导航算法对时序对齐后的惯导和卫星导航接收机所敏感到的信息进行组合解算,控制制导武器按规划弹道飞行。
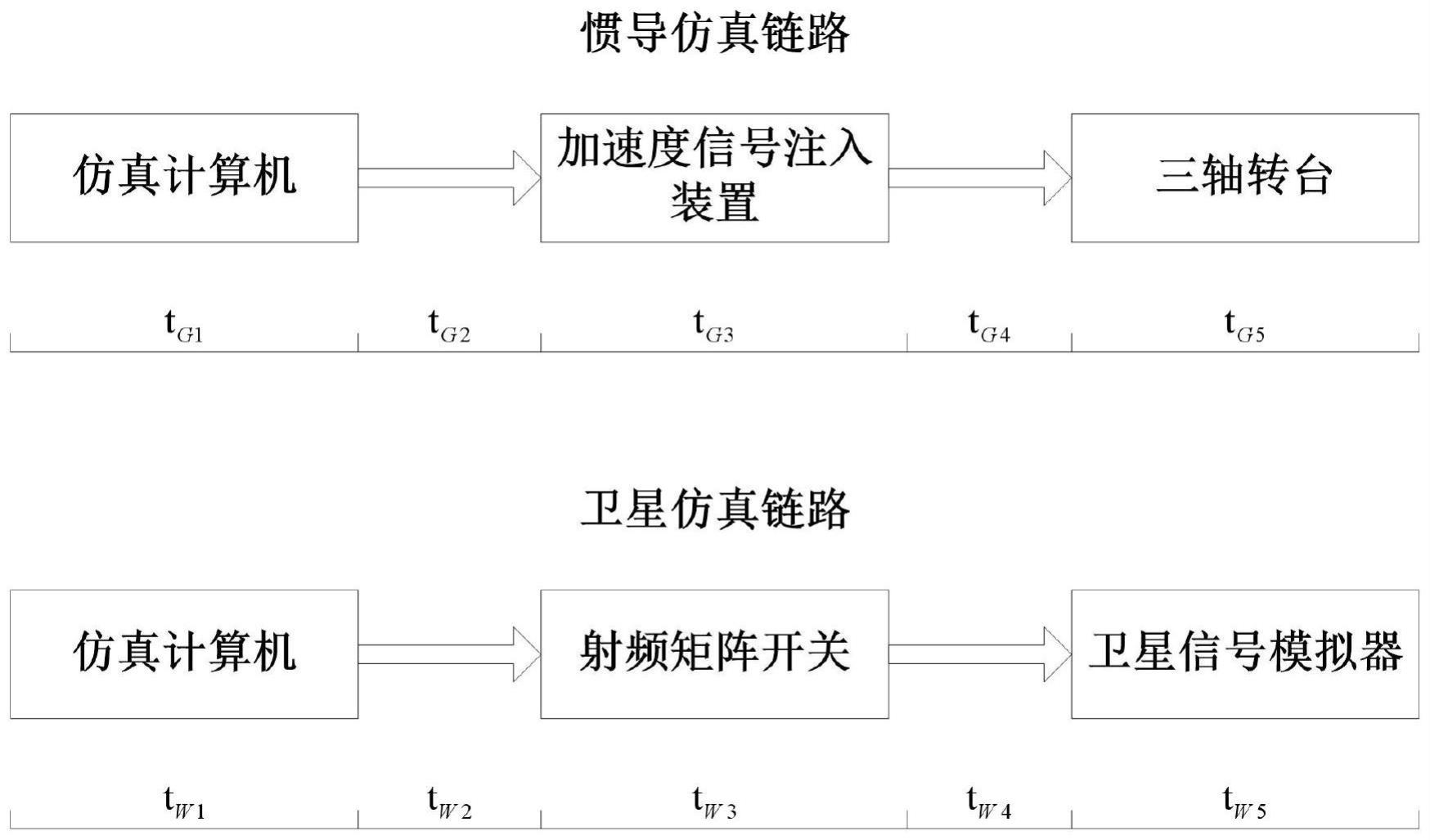
18、其中,所述步骤1中,所述惯导仿真链路上包括:仿真计算机、加速度信号注入装置、三轴转台;
19、惯导所敏感到的信息为经仿真计算机—>加速度信号注入装置—>三轴转台响应后时刻的位置、速度和加速度信号;
20、所述惯导仿真链路时间计算如下:
21、仿真计算机解算出制导武器当前的弹道,将解算出的x、y、z轴加速度信号传送给加速度信号注入装置,加速度信号注入装置对x、y、z轴加速度信号进行接口转换,再将这些信号注入给惯导;
22、惯导仿真链路执行需要的时间tg为:tg=tg1+tg2+tg3+tg4+tg5;
23、其中,tg1为仿真计算机解算时间;tg2为仿真计算机输出加速度信号至加速度信号注入装置输入加速度信号之间的信号传输时间;tg3为加速度信号注入装置的处理时间;tg4为加速度信号注入装置输出至三轴转台输入之间的信号传输时间;tg5为三轴转台处理时间。
24、其中,所述步骤2中,所述卫星仿真链路上包括:仿真计算机、射频矩阵开关、卫星信号模拟器;
25、卫星导航接收机所敏感到的信息为经仿真计算机—>射频矩阵开关—>卫星信号模拟器响应后时刻的位置、速度和加速度信号;
26、卫星仿真链路时间计算如下:
27、仿真计算机解算出制导武器当前的弹道,将将解算出的弹道信号传送给射频矩阵开关,射频矩阵开关选通对应的卫星信号发射天线所在链路,再将处理后的弹道信号传送给卫星信号模拟器;卫星仿真链路执行需要的时间tw为:tw=tw1+tw2+tw3+tw4+tw5。
28、其中,tw1为仿真计算机解算时间;tw2为仿真计算机输出弹道信号至射频矩阵开关输入弹道信号之间的信号传输时间;tw3为射频矩阵开关处理时间;tw4为射频矩阵开关输出至卫星信号模拟器输入之间的信号传输时间;tw5为卫星信号模拟器处理时间。
29、(三)有益效果
30、与现有技术相比较,本发明开展卫星/惯性组合导航半实物仿真的关键有三点:
31、1)将惯导安装到三轴转台上,利用三轴转台模拟制导武器飞行过程中的姿态变化;
32、2)将卫星导航接收机放置在卫星信号模拟器前的适当位置,利用卫星信号模拟器为卫星导航接收机提供实时的导航定位信息;
33、3)组合导航装置中的组合导航算法对惯导和卫星导航接收机所敏感到的信息进行组合解算,控制制导武器按规划弹道飞行。
34、本发明技术方案所提供的卫星/惯性组合导航半实物仿真时序修正方法,消除了惯导仿真链路与卫星仿真链路执行过程中的时序差异,解决了传统的卫星/惯性组合导航半实物仿真中存在的惯导仿真链路与卫星仿真链路时序不匹配,导航定位信息解算不准确,仿真精度低的弊端。使用该方法进行仿真更接近于组合导航装置的实际工作过程,具有更高的仿真精度。该仿真方法设计简单、有效、实用,具有很好的推广应用空间。
35、本发明方法还在某陆军制导武器半实物仿真试验中获得了良好的应用效果。综上可以看出,本发明有着诸多优点,具有广阔的军事应用前景。
技术特征:
1.一种卫星/惯性组合导航半实物仿真时序修正方法,其特征在于,所述方法用于消除惯导仿真链路与卫星仿真链路执行过程中的时序差异,所述方法包括:
2.如权利要求1所述的卫星/惯性组合导航半实物仿真时序修正方法,其特征在于,所述步骤1中,计算惯导仿真链路时间的过程为使用示波器测量出惯导仿真链路执行需要的时间tg。
3.如权利要求2所述的卫星/惯性组合导航半实物仿真时序修正方法,其特征在于,所述步骤2中,计算卫星仿真链路时间的过程为使用示波器测量出卫星仿真链路执行需要的时间tw。
4.如权利要求3所述的卫星/惯性组合导航半实物仿真时序修正方法,其特征在于,所述步骤3中,计算两条链路时间差的过程为计算出两条链路的时间差twg=tw-tg。
5.如权利要求4所述的卫星/惯性组合导航半实物仿真时序修正方法,其特征在于,所述步骤4中,对齐两条链路时序的过程为:
6.如权利要求5所述的卫星/惯性组合导航半实物仿真时序修正方法,其特征在于,所述步骤5中,组合导航解算的过程为:
7.如权利要求2所述的卫星/惯性组合导航半实物仿真时序修正方法,其特征在于,所述步骤1中,所述惯导仿真链路上包括:仿真计算机、加速度信号注入装置、三轴转台;
8.如权利要求7所述的卫星/惯性组合导航半实物仿真时序修正方法,其特征在于,tg1为仿真计算机解算时间;tg2为仿真计算机输出加速度信号至加速度信号注入装置输入加速度信号之间的信号传输时间;tg3为加速度信号注入装置的处理时间;tg4为加速度信号注入装置输出至三轴转台输入之间的信号传输时间;tg5为三轴转台处理时间。
9.如权利要求3所述的卫星/惯性组合导航半实物仿真时序修正方法,其特征在于,所述步骤2中,所述卫星仿真链路上包括:仿真计算机、射频矩阵开关、卫星信号模拟器;
10.如权利要求9所述的卫星/惯性组合导航半实物仿真时序修正方法,其特征在于,tw1为仿真计算机解算时间;tw2为仿真计算机输出弹道信号至射频矩阵开关输入弹道信号之间的信号传输时间;tw3为射频矩阵开关处理时间;tw4为射频矩阵开关输出至卫星信号模拟器输入之间的信号传输时间;tw5为卫星信号模拟器处理时间。
技术总结
本发明属于组合导航制导武器系统技术领域,具体涉及一种卫星/惯性组合导航半实物仿真时序修正方法,所述方法包括:步骤1:计算惯导仿真链路时间;步骤2:计算卫星仿真链路时间;步骤3:计算两条链路时间差;步骤4:对齐两条链路时序;步骤5:组合导航解算。该方法计算出惯导仿真链路与卫星仿真链路执行所需的时间,消除了不同链路执行过程中的时序差异,解决了传统的卫星/惯性组合导航半实物仿真中存在的惯导仿真链路与卫星仿真链路时序不匹配,导航定位信息解算不准确,仿真精度低的弊端。本发明的优点是,仿真过程更接近于组合导航装置的实际工作过程,具有更高的仿真精度。该仿真方法设计简单、有效、实用,具有很好的推广应用空间。
技术研发人员:张翔,刘满国,刘梦焱,朱克炜,李海城,赵瑾,闫俊良,刘琦,岳超,陈炜,赵丹丹,田莉萍
受保护的技术使用者:西安现代控制技术研究所
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!