基于多项式递推最小二乘法的提高惯性制导精度的方法与流程
本发明涉及一种于多项式递推最小二乘法的提高惯性制导精度的方法,属于惯性导航。
背景技术:
1、当前航天飞行器的惯性导航主要采用陀螺仪和加速度计构成的捷联系统或平台系统。在实弹飞行前,需要在地面对陀螺仪和加速度计的误差系数进行标定,根据标定的结果通过误差补偿可有效提高惯性导航的使用精度。目前,经过地面标定的惯性器件,在实际飞行导航试验中,根据遥测数据计算的速度和位置的理论值仍与外测获得的真实飞行速度和位置值之间存在较大的偏差,出现所谓的“天地不一致”的情况。经分析,出现“天地不一致”的原因是地面标定方法和数据处理方法的精度不足,造成实际飞行过程中误差积累,导致飞行精度变差,因此需要对地面标定时的误差模型和数据处理方法进行修正。
2、目前常用的处理方式为采用最小二乘法进行参数辨识,其优点是输出误差量的平方和最小,且一次计算就可得到待估参数x的估计值但缺点是随着数据量的积累会导致计算量增大。
3、为减小计算量,工程上采用递推最小二乘法,其核心思想是利用上一时刻的估计值与现时刻的观测量yn+1求解出现时刻的估计值优点是计算量减小,可满足实时性要求。递推最小二乘法计算公式如下:
4、kn+1=γncn+1t[ik+cn+1γncn+1t]-1
5、
6、γn+1=γn-kn+1cn+1γn
7、
8、其中,ik为k维单位阵。
9、但注意到,上述递推最小二乘法存在的一个问题是:不是最小的。比如,当噪声为零时,依据递推最小二乘法的公式,有
10、
11、这就意味着估计值存在偏差,使得从而不是最小。为了克服偏差可让信息逆矩阵γn的值趋于无穷大,但无论怎么取值必然有
12、为此,需要寻找一种新的方法来消除该项偏差,以提高惯性制导的精度。
技术实现思路
1、本发明的目的在于克服上述缺陷,提供一种基于多项式递推最小二乘法的提高惯性制导精度的方法,解决了传统最小二乘法存在无法消除的偏差导致惯性制导精度低的技术问题,本发明可显著提高估计精度和估计效率,具有更广的应用范围和更高的工程价值。
2、为实现上述发明目的,本发明提供如下技术方案:
3、一种基于多项式递推最小二乘法的提高惯性制导精度的方法,包括:
4、根据惯性制导遥外测观测量之差以及飞行环境函数,构建制导工具误差模型,所述的制导工具误差模型满足线性关系;
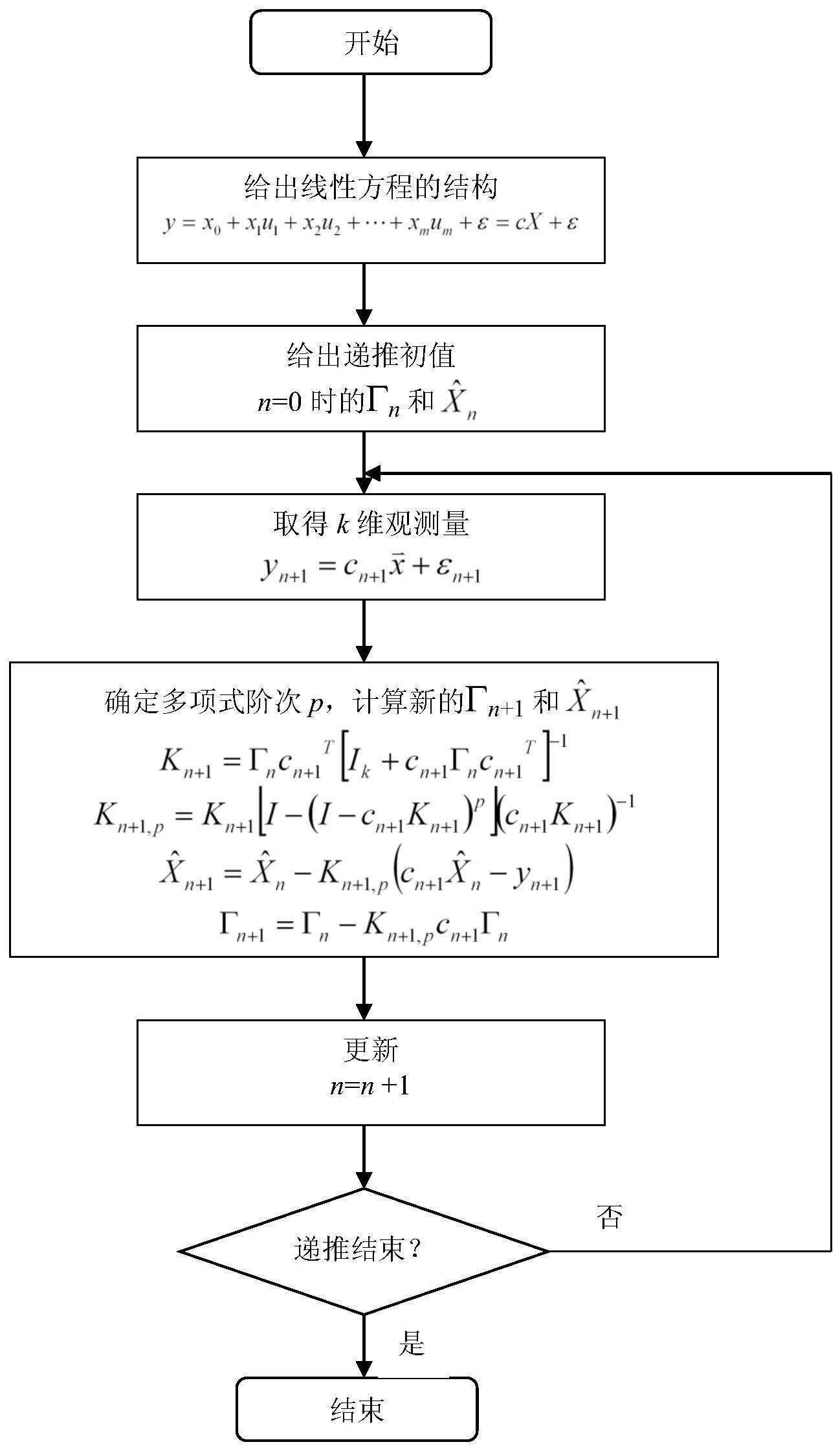
5、根据制导工具误差模型,构建基于多项式递推最小二乘法的递推公式如下:
6、kn+1=γncn+1t[ik+cn+1γncn+1t]-1
7、
8、
9、
10、γn+1=γn-kn+1,pcn+1γn
11、其中,kn+1为n+1递推时刻的反馈矩阵,γn、γn+1分别为n递推时刻和n+1递推时刻的信息逆矩阵,ik为k维单位阵,cn+1为n+1递推时刻飞行环境函数矩阵,分别为n递推时刻和n+1递推时刻的制导工具误差系数估计值,kn+1,p为n+1递推时刻的p阶多项式反馈矩阵,yn+1为n+1递推时刻的制导遥外测观测量之差,yn+1=y遥,n+1-y外,n+1,y遥,n+1为n+1递推时刻的k维制导遥测观测量,y外,n+1为n+1递推时刻的k维制导外测观测量;n为≥0的整数,k为≥1的整数;
12、实时根据当前递推时刻的制导遥外测观测量之差结合最小二乘法的递推公式,确定当前递推时刻的制导工具误差系数估计值,利用该制导工具误差系数估计值对当前递推时刻的制导遥测观测量进行补偿。
13、进一步的,制导工具误差模型为:
14、yn+1=cn+1x+v
15、其中,cn+1为n+1递推时刻飞行环境函数矩阵,x为制导工具常值误差系数,v为噪声。
16、进一步的,制导工具误差模型包括由陀螺误差和加速度计误差组成的遥外测速度误差模型或者遥外测位置误差模型。
17、进一步的,阶次p的取值范围为1~8。
18、进一步的,阶次p的取值为3。
19、进一步的,n=0代表初始时刻,γ0和为给定的已知量。
20、进一步的,按照如下补偿公式,利用该制导工具误差系数估计值对当前递推时刻的k维制导遥测观测量进行补偿:
21、
22、其中,为补偿后的制导遥测观测量。
23、进一步的,在每个递推时刻,利用确定的工具误差系数对工具误差的装订值进行修正,进而实现对惯性制导遥测观测量的补偿。
24、进一步的,在当前递推时刻确定工具误差系数前,判断当前递推时刻的惯性制导遥外测观测量之差是否异常,若无异常,则继续处理,否则,则用前一递推时刻的遥外测观测量代替当前递推时刻的遥外测观测量执行后续处理。
25、进一步的,在每个递推时刻确定工具误差系数前,判断当前的制导遥外测观测量之差是否异常,若无异常,则继续后续处理,否则,则进一步判断发生异常的数据所处的维度,在当前递推时刻将该维度的相关递推从最小二乘法的递推公式中隔离,其余维度继续后续处理。
26、本发明与现有技术相比具有如下至少一种有益效果:
27、(1)本发明创造性的提出一种基于多项式递推最小二乘的提高惯性制导精度的方法,通过增加一个多项式反馈矩阵,并使制导工具误差系数估计值和信息逆矩阵根据多项式反馈矩阵进行更新,可显著提高估计精度和估计效率。
28、(2)本发明方法可依据惯性导航的精度要求,可选择合适的多项式阶次以在实时性和精度之间找到最佳匹配关系。
29、(3)本发明给出的多项式递推最小二乘,p=1时为传统的递推最小二乘法,也就是说,传统的递推最小二乘法是本发明的一种特殊情况,本发明具有更广的应用范围和工程价值。
技术特征:
1.一种基于多项式递推最小二乘法的提高惯性制导精度的方法,其特征在于,包括:
2.根据权利要求1所述的一种基于多项式递推最小二乘法的提高惯性制导精度的方法,其特征在于,制导工具误差模型为:
3.根据权利要求1所述的一种基于多项式递推最小二乘法的提高惯性制导精度的方法,其特征在于,制导工具误差模型包括由陀螺误差和加速度计误差组成的遥外测速度误差模型或者遥外测位置误差模型。
4.根据权利要求1所述的一种基于多项式递推最小二乘法的提高惯性制导精度的方法,其特征在于,阶次p的取值范围为1~8。
5.根据权利要求1所述的一种基于多项式递推最小二乘法的提高惯性制导精度的方法,其特征在于,阶次p的取值为3。
6.根据权利要求1所述的一种基于多项式递推最小二乘法的提高惯性制导精度的方法,其特征在于,n=0代表初始时刻,γ0和为给定的已知量。
7.根据权利要求1所述的一种基于多项式递推最小二乘法的提高惯性制导精度的方法,其特征在于,按照如下补偿公式,利用该制导工具误差系数估计值对当前递推时刻的k维制导遥测观测量进行补偿:
8.根据权利要求1所述的一种基于多项式递推最小二乘法的提高惯性制导精度的方法,其特征在于,在每个递推时刻,利用确定的工具误差系数对工具误差的装订值进行修正,进而实现对惯性制导遥测观测量的补偿。
9.根据权利要求1所述的一种基于多项式递推最小二乘法的提高惯性制导精度的方法,其特征在于,在当前递推时刻确定工具误差系数前,判断当前递推时刻的惯性制导遥外测观测量之差是否异常,若无异常,则继续处理,否则,则用前一递推时刻的遥外测观测量代替当前递推时刻的遥外测观测量执行后续处理。
10.根据权利要求1所述的一种基于多项式递推最小二乘法的提高惯性制导精度的方法,其特征在于,在每个递推时刻确定工具误差系数估计值前,判断当前的惯性制导遥外测观测量之差是否异常,若无异常,则继续后续处理,否则,则进一步判断发生异常的数据所处的维度,在当前递推时刻将该维度的相关递推从最小二乘法的递推公式中隔离,其余维度继续后续处理。
技术总结
本发明公开了一种基于多项式递推最小二乘法的提高惯性制导精度的方法,包括:根据惯性制导遥外测观测量之差以及飞行环境函数,构建制导工具误差模型,所述的制导工具误差模型满足线性关系;根据制导工具误差模型,构建基于多项式递推最小二乘法的递推公式;实时根据当前递推时刻的制导遥外测观测量之差结合最小二乘法的递推公式,确定当前递推时刻的制导工具误差系数估计值,利用该制导工具误差系数估计值对当前递推时刻的制导遥测观测量进行补偿。本发明可显著提高估计精度和估计效率,具有更广的应用范围和更高的工程价值。
技术研发人员:魏宗康
受保护的技术使用者:北京航天控制仪器研究所
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!