点云数据处理方法及装置、存储介质、计算设备与流程
本申请涉及计算机,尤其涉及一种点云数据处理方法及装置、存储介质、计算设备。
背景技术:
1、激光雷达是自动驾驶车辆的主要传感器,激光雷达所产生的数据能直接提供距离信息,是算法研发的重要数据来源。激光雷达数据包含维度多,点数多,数据量大;因此,激光雷达数据的低成本高效存储压缩对自动驾驶研发有着重要意义。
2、目前的压缩存储方案分为有损,无损两种。无损方案基于几何结构,将点组织成空间的树状结构再进行编码压缩;也有利用深度学习的有损压缩方案,对点云进行编码(encoder),再通过解码(decoder)复原。
3、但是,无损压缩的方案基于空间结构进行压缩,需要对点云的点进行一遍编码处理,再将编码后的结果进行通用的字节流压缩,预处理时间比较长,难以做到实时压缩;且无损压缩方案对非空间坐标字段的信息,比如点云的线束和反射强度信息,无法进行压缩;有损压缩方案可以无视数据类型,对所有字段进行编码,但在精度上有明显缺陷,无法还原;且有损压缩方案容易丢失细节,而且压缩解压需要算力设备支持,成本较高;对有明确物理意义的字段,深度学习会给出不可解释的错误结果,影响下游任务。
技术实现思路
1、本申请要解决的技术问题是如何在保证压缩精度的基础上提升压缩效率。
2、为了达到上述目的,本申请提供了以下技术方案:
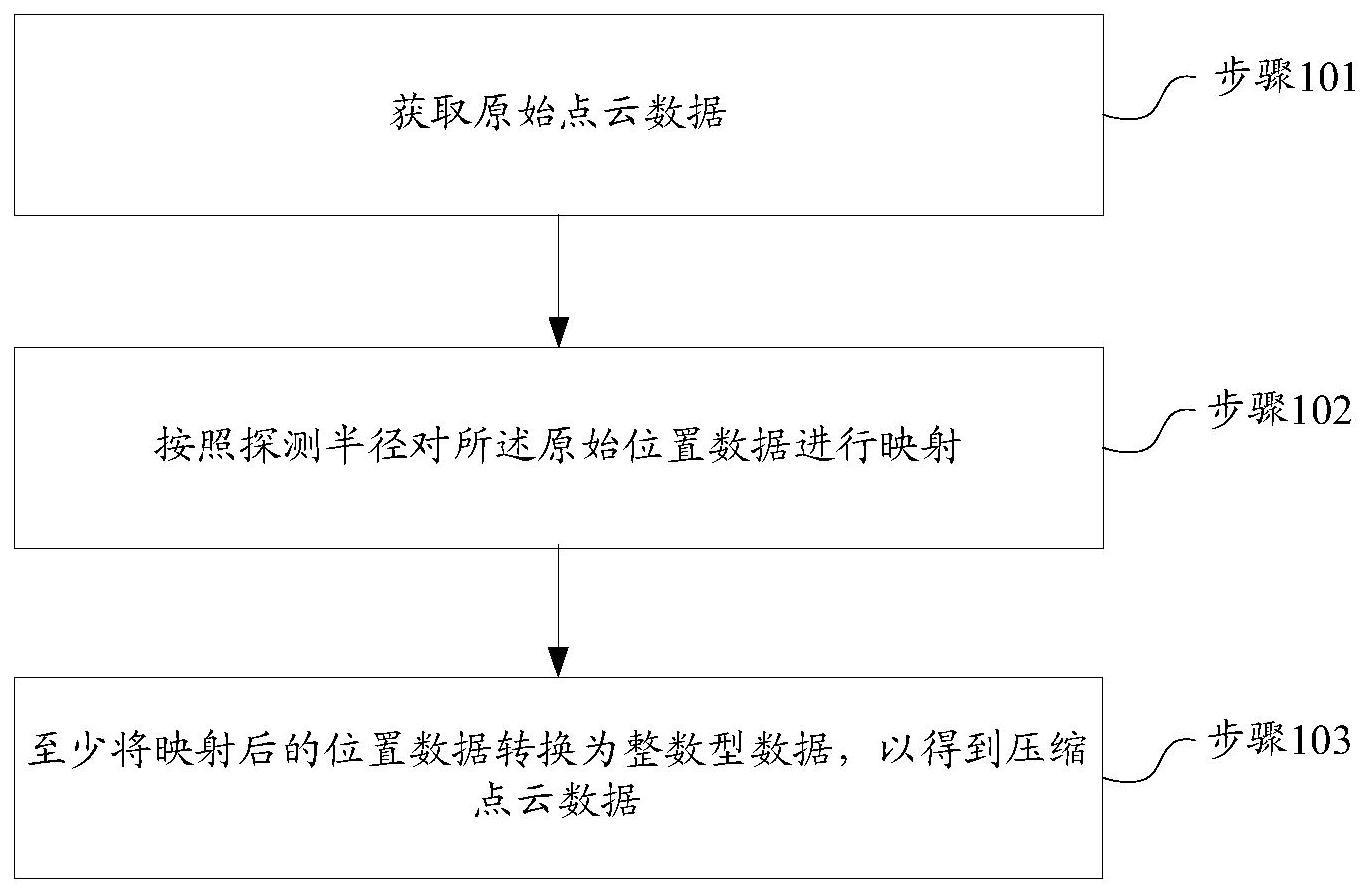
3、第一方面,提供了一种点云数据处理方法,点云数据处理方法包括:获取原始点云数据,所述原始点云数据包括原始位置数据;按照探测半径对所述原始位置数据进行映射,映射后的位置数据为浮点数据;至少将映射后的位置数据转换为整数型数据,以得到压缩点云数据。
4、可选的,所述按照探测半径对所述原始位置数据进行映射包括:按照第一半径对所述原始位置数据中第一水平位置以及第一竖直位置进行映射;按照第二半径对所述原始位置数据中的第一垂直位置进行映射,所述第二半径小于所述第一半径。
5、可选的,所述将映射后的位置数据转换为整数型数据包括:按照预设精度对映射后的所述第一水平位置、第一竖直位置以及所述第一垂直位置进行筛选;计算筛选后的所述第一水平位置、第一竖直位置以及所述第一垂直位置分别与精度因子的乘积,以得到对应的整数型数据,所述精度因子与所述预设精度相对应。
6、可选的,所述原始点云数据还包括传感器属性数据,所述至少将映射后的位置数据转换为整数型数据包括:将映射后的位置数据转换为整数型数据,转换后的位置数据包括第二垂直位置;按照第一偏移量对所述第二垂直位置进行左移位运算,所述第一偏移量为所述传感器属性数据所占用的比特数,以得到第一组合数据。
7、可选的,所述传感器属性数据包括线束数据以及反射强度数据,所述方法还包括:按照第二偏移量对所述线束数据进行左移位运算,所述第二偏移量为所述反射强度数据所占用的比特数,以得到第二组合数据。
8、可选的,点云数据处理方法还包括:将所述第二组合数据进行字节流压缩。
9、可选的,转换后的位置数据包括第二水平位置以及第二竖直位置,所述第二水平位置与所述第二竖直位置分别占用两个字节,所述第二组合数据占用三个字节。
10、第二方面,本申请还公开一种点云数据处理方法,点云数据处理方法包括:接收压缩点云数据,所述压缩点云数据中的位置数据为整数型数据;将所述整数型数据转换为浮点数据;至少按照探测半径对所述浮点数据进行反映射,以得到解压缩点云数据。
11、可选的,所述将所述整数型数据转换为浮点数据包括:计算所述整数型数据与精度因子的乘积,以得到第一水平位置、第一竖直位置以及第一垂直位置,所述精度因子与预设精度相对应。
12、可选的,所述将所述整数型数据转换为浮点数据包括:按照第一半径对所述第一水平位置以及所述第一竖直位置进行反映射;按照第二半径对所述第一垂直位置进行反映射,所述第二半径小于所述第一半径。
13、第三方面,本申请还公开一种点云数据处理装置,点云数据处理装置包括:获取模块,用于获取原始点云数据,所述原始点云数据包括原始位置数据;映射模块,用于按照探测半径对所述原始位置数据进行映射,映射后的位置数据为浮点数据;压缩模块,用于至少将映射后的位置数据转换为整数型数据,以得到压缩点云数据。
14、第四方面,本申请还公开一种点云数据处理装置,点云数据处理装置包括:接收模块,用于接收压缩点云数据,所述压缩点云数据中的位置数据为整数型数据;转换模块,用于将所述整数型数据转换为浮点数据;解压缩模块,用于至少按照探测半径对所述浮点数据进行反映射,以得到解压缩点云数据。
15、第五方面,提供了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器运行以执行第一方面或第二方面提供的任意一种方法。
16、第六方面,提供了一种计算机程序产品,其上存储有计算机程序,计算机程序被处理器运行以执行第一方面或第二方面提供的任意一种方法。
17、第七方面,本申请实施例还提供一种芯片(或者说数据传输装置),该芯片上存储有计算机程序,在计算机程序被芯片执行时,实现上述方法的步骤。
18、第八方面,本申请实施例还提供一种系统芯片,应用于终端中,所述芯片系统包括至少一个处理器和接口电路,所述接口电路和所述至少一个处理器通过线路互联,所述至少一个处理器用于执行指令,以执行第一方面或第二方面提供的任意一种方法。
19、第九方面,本申请实施例还提供一种计算设备,包括存储器和处理器,所述存储器上存储有可在所述处理器上运行的计算机程序,所述处理器运行所述计算机程序时执行第一方面或第二方面提供的任意一种方法的步骤。
20、与现有技术相比,本申请实施例的技术方案具有以下有益效果:
21、本申请技术方案中,获取原始点云数据,所述原始点云数据包括原始位置数据;按照探测半径对所述原始位置数据进行映射,映射后的位置数据为浮点数据;至少将映射后的位置数据转换为整数型数据,以得到压缩点云数据。本申请通过对点云数据中原始位置数据进行映射,可以将原始位置数据映射为具有一定精度的浮点数据;通过转换处理将位置数据压缩为整数型数据,从而在保留点云数据的精度的基础上实现对点云数据的压缩,提升传输效率,还能够提升后续任务使用点云数据的可靠性。
22、进一步地,将映射后的位置数据转换为整数型数据,转换后的位置数据包括第二垂直位置;按照第一偏移量对所述第二垂直位置进行左移位运算,所述第一偏移量为所述传感器属性数据所占用的比特数,以得到第一组合数据。本申请技术方案通过将原始点云数据划分为位置数据和传感器属性数据,根据传感器属性数据本身的特性,对传感器属性数据采用位移运算的方式进行压缩,压缩效率较高;并且下游任务也能精准地还原传感器属性数据,从而满足下游任务的需求。
技术特征:
1.一种点云数据处理方法,其特征在于,包括:
2.根据权利要求1所述的点云数据处理方法,其特征在于,所述按照探测半径对所述原始位置数据进行映射包括:
3.根据权利要求2所述的点云数据处理方法,其特征在于,所述将映射后的位置数据转换为整数型数据包括:
4.根据权利要求1所述的点云数据处理方法,其特征在于,所述原始点云数据还包括传感器属性数据,所述至少将映射后的位置数据转换为整数型数据包括:
5.根据权利要求4所述的点云数据处理方法,其特征在于,所述传感器属性数据包括线束数据以及反射强度数据,所述方法还包括:
6.根据权利要求5所述的点云数据处理方法,其特征在于,还包括:
7.根据权利要求5所述的点云数据处理方法,其特征在于,转换后的位置数据包括第二水平位置以及第二竖直位置,所述第二水平位置与所述第二竖直位置分别占用两个字节,所述第二组合数据占用三个字节。
8.一种点云数据处理方法,其特征在于,包括:
9.根据权利要求8所述的点云数据处理方法,其特征在于,所述将所述整数型数据转换为浮点数据包括:
10.根据权利要求9所述的点云数据处理方法,其特征在于,所述将所述整数型数据转换为浮点数据包括:
11.一种点云数据处理装置,其特征在于,包括:
12.一种点云数据处理装置,其特征在于,包括:
13.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器运行时执行权利要求1至10中任一项所述点云数据处理方法的步骤。
14.一种计算设备,包括存储器和处理器,所述存储器上存储有可在所述处理器上运行的计算机程序,其特征在于,所述处理器运行所述计算机程序时执行权利要求1至10中任一项所述点云数据处理方法的步骤。
技术总结
本申请提供了一种点云数据处理方法及装置、存储介质、计算设备,该点云数据处理方法包括:获取原始点云数据,所述原始点云数据包括原始位置数据;按照探测半径对所述原始位置数据进行映射,映射后的位置数据为浮点数据;至少将映射后的位置数据转换为整数型数据,以得到压缩点云数据。本申请技术方案能够在保证压缩精度的基础上提升压缩效率。
技术研发人员:黄超,黄安利,姚为龙
受保护的技术使用者:上海仙途智能科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!