基于自动驾驶平台的地面沉降监测方法与流程
本发明涉及地面沉降监测,尤其涉及一种基于自动驾驶平台的地面沉降监测方法。
背景技术:
1、地面沉降又称为地面下沉或地陷,是人类活动及自然环境影响下,由于地下松散地层固结压缩,导致地表标高降低的一种局部的下降运动(或工程地质现象)。地面沉降可引起路面破损,建筑物倾斜,建筑物地基损坏等严重问题,在沿海地区还可能引起海水倒灌。地面沉降一般表现为区域性下沉和局部下沉两种形式。为了避免地面沉降带来的各种次生灾害,需要长期对地面沉降进行监测。常见的检测方式包括传统的监测、遥感监测等。
2、传统的检测由工程技术人员定期使用设备测量沉降观测点的高程,通过长期记录沉降观测点的高程来判断该处是否发生沉降,如已公开的专利2020104240781就公开了一种地面沉降分区分层监控与警方法及装置,该检测方法主要针对局部下沉,优点是可以高精度的反映小范围内的地面沉降情况,缺点是测量费时费力,无法直观的反映区域性的地面沉降程度。
3、遥感检测指的通过遥感卫星影像,结合影像处理技术,对大范围区域的宏观地面沉降现象进行检测,优点是成本低廉,检测范围大,缺点是仅适用于大范围区域内的宏观地面沉降检测,无法反映较小范围内的地面沉降情况,并且精度相对较低。目前缺少低成本方式的长期较大范围区域内的沉降情况的高精度持续监测方法。
技术实现思路
1、本发明的目的是提供一种基于自动驾驶平台的地面沉降监测方法,利用自动驾驶平台上的各类传感器长期对较大范围区域内的沉降情况进行高精度的持续监测。
2、本发明提供一种基于自动驾驶平台的地面沉降监测方法,所述方法包括以下步骤:
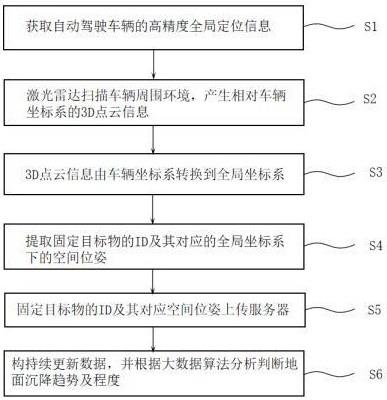
3、步骤s1:获取自动驾驶车辆的高精度全局定位信息;
4、步骤s2:激光雷达扫描车辆周围环境,产生相对车辆坐标系的3d点云信息;
5、步骤s3:3d点云信息由车辆坐标系转换到全局坐标系;
6、步骤s4:提取固定目标物的id及其对应的全局坐标系下的空间位姿;
7、步骤s5:固定目标物的id及其对应空间位姿上传服务器;
8、步骤s6:持续更新数据,并根据大数据算法分析判断地面沉降趋势及程度。
9、进一步改进在于:所述步骤s1中:通过融合定位算法,利用gps、imu和轮速传感器的数据,获取高精度与高刷新率的自动驾驶车辆全局定位信息。
10、进一步改进在于:所述gps为自动驾驶平台安装的定位信息模块;所述imu为用于测量环卫车六轴线性加速度及角加速度的惯性测量单元;所述轮速传感器安装在自动驾驶车辆的车轮上,用于获取车轮转速。
11、进一步改进在于:所述融合定位算法由自动驾驶车辆中自动驾驶控制器运行,所述自动驾驶控制器还用于读取传感器数据、运行自动驾驶算法及通过can总线协议下发自动驾驶车辆底盘控制指令。
12、进一步改进在于:所述步骤s2中:激光雷达向目标发射探测激光束,然后将接收到的从目标反射回来的信号与发射信号进行比较,经处理后获取周围环境的3d点云信息。
13、进一步改进在于:所述步骤s4中:通过深度算法从3d点云信息提取固定目标物的id及其在全局坐标系下的空间位姿。
14、进一步改进在于:所述固定目标物包括路面、桥面和建筑物。
15、进一步改进在于:所述步骤s5中:利用5g模块将步骤s4获取的固定目标物的id及其对应空间位姿上传服务器。
16、进一步改进在于:所述5g模块与所述自动驾驶控制器网络连接,通过5g或4g/3g移动网络连接公网,为自动驾驶控制器提供公网通信接入点。
17、进一步改进在于:所述步骤s6中:服务器中维护有目标id及其空间位姿的数据库,服务器利用大数据算法对持续更新的空间位姿进行长期的统计及跟踪分析,与固定目标物的id及其空间位姿历史数据进行持续对比分析,进而进行自动驾驶车辆行驶路线地面的沉降监测。
18、本发明的有益效果:本发明利用自动驾驶环卫车辆具备高精度光学传感器、作业路线相对固定等特点,实现了对区域内路面、桥面、建筑物的沉降或倾斜进行长期的跟踪监测,相比较人工测绘方式,本方法每天都会更新一次或多次数据,具有数据更新率高的特点;本发明利用gps、imu、轮速传感器生成高精度定位信息,结合激光雷达可以获取到更高精度的路面、桥面、建筑物等的沉降信息;本发明充分利用自动驾驶环卫平台现有的传感器,无需增加额外的硬件成本,且无需安排专人现场勘测,节约人力资源。
技术特征:
1.一种基于自动驾驶平台的地面沉降监测方法,其特征在于,包括:
2.根据权利要求1所述的基于自动驾驶平台的地面沉降监测方法,其特征在于,所述步骤s1中:通过融合定位算法,利用gps、imu和轮速传感器的数据,获取自动驾驶车辆全局定位信息。
3.根据权利要求2所述的基于自动驾驶平台的地面沉降监测方法,其特征在于,所述gps为自动驾驶平台安装的定位信息模块;所述imu为用于测量环卫车六轴线性加速度及角加速度的惯性测量单元;所述轮速传感器安装在自动驾驶车辆的车轮上,用于获取车轮转速。
4.根据权利要求2所述的基于自动驾驶平台的地面沉降监测方法,其特征在于,所述融合定位算法由自动驾驶车辆中自动驾驶控制器运行,所述自动驾驶控制器还用于读取传感器数据、运行自动驾驶算法及通过can总线协议下发自动驾驶车辆底盘控制指令。
5.根据权利要求1所述的基于自动驾驶平台的地面沉降监测方法,其特征在于,所述步骤s2中:激光雷达向目标发射探测激光束,然后将接收到的从目标反射回来的信号与发射信号进行比较,经处理后获取周围环境的3d点云信息。
6.根据权利要求1所述的基于自动驾驶平台的地面沉降监测方法,其特征在于,所述步骤s4中:通过深度算法从3d点云信息提取固定目标物的id及其在全局坐标系下的空间位姿。
7.根据权利要求6所述的基于自动驾驶平台的地面沉降监测方法,其特征在于,所述固定目标物包括路面、桥面和建筑物。
8.根据权利要求1所述的基于自动驾驶平台的地面沉降监测方法,其特征在于,所述步骤s5中:利用5g模块将步骤s4获取的固定目标物的id及其对应空间位姿上传服务器。
9.根据权利要求8所述的基于自动驾驶平台的地面沉降监测方法,其特征在于,所述5g模块与所述自动驾驶控制器网络连接,通过5g或4g/3g移动网络连接公网,为自动驾驶控制器提供公网通信接入点。
10.根据权利要求5所述的基于自动驾驶平台的地面沉降监测方法,其特征在于,所述步骤s6中:服务器中维护有目标id及其空间位姿的数据库,服务器利用大数据算法对持续更新的空间位姿进行长期的统计及跟踪分析,与固定目标物的id及其空间位姿历史数据进行持续对比分析,进而进行自动驾驶车辆行驶路线地面的沉降监测。
技术总结
本发明提供一种基于自动驾驶平台的地面沉降监测方法,包括:步骤S1:获取自动驾驶车辆的全局定位信息;步骤S2:激光雷达扫描车辆周围环境,产生相对车辆坐标系的3D点云信息;步骤S3:3D点云信息由车辆坐标系转换到全局坐标系;步骤S4:提取固定目标物的ID及其对应的全局坐标系下的空间位姿;步骤S5:固定目标物的ID及其对应空间位姿上传服务器;步骤S6:持续更新数据,并根据大数据算法分析判断地面沉降趋势及程度。本发明利用自动驾驶环卫车辆具备高精度光学传感器、作业路线相对固定等特点,实现了对区域内路面、桥面、建筑物的沉降或倾斜进行长期的跟踪监测,节约人力资源与监测成本。
技术研发人员:何弢,阮国靖,廖文龙
受保护的技术使用者:酷哇科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!