一种适用于GPS数据不连续时的车辆轨迹推测法的制作方法
本发明涉及车辆轨迹预测,尤其涉及一种适用于gps数据不连续时的车辆轨迹推测方法。
背景技术:
1、gps全球定位系统,是一种以人造地球卫星为基础的高精度无线电导航的定位系统,它在全球任何地方以及近地空间都能够提供准确的地理位置、车行速度及精确的时间信息。
2、申请号为cn201910993411.8的中国发明专利提供了一种基于差分gps和车辆运动学模型的轨迹录制方法,通过差分gps模块获取当前时刻t车辆所处位置的gps经纬度数据、卫星数量信息和pdop位置精度因子信息,通过整车can解析模块获取当前时刻t车辆的车速vt和方向盘转角ωt,通过车辆运动学航迹推测算法得到车辆运动学生成的运动轨迹,根据当前时刻t获取的卫星数量信息来判断差分gps模块在当前时刻t获取的车辆gps经纬度数据是否存在丢失,再未丢失时判定gps经纬度数据噪声,当gps经纬度数据噪声较大时采用扩展卡尔曼滤波算法先进行数据融合后再进行轨迹录制。
3、但是,本申请人发现现有技术至少存在以下问题:
4、在道路交通调查中,对路段上的交通流量和速度等参数进行分析时,需要通过gps定位数据来确定车辆的位置和运动状态,以获得完整的交通流量和速度数据。如果在分析过程中无法获取gps定位数据,只能根据其他途径获取路段上车辆行驶状态的信息。例如在路段上设置一些gps信号接收装置,或者通过设置一些特殊标志,从车载gps设备获得路段上的信息,但是这种方式的精度较低,应用效果不好。
技术实现思路
1、有鉴于此,本发明的目的在于提出一种适用于gps数据不连续时的车辆轨迹推测方法,以解决在道路交通调查分析过程中无法获取gps定位数据时,导致调查精度低的问题。
2、基于上述目的,本发明提供了一种适用于gps数据不连续时的车辆轨迹推测方法,包括:
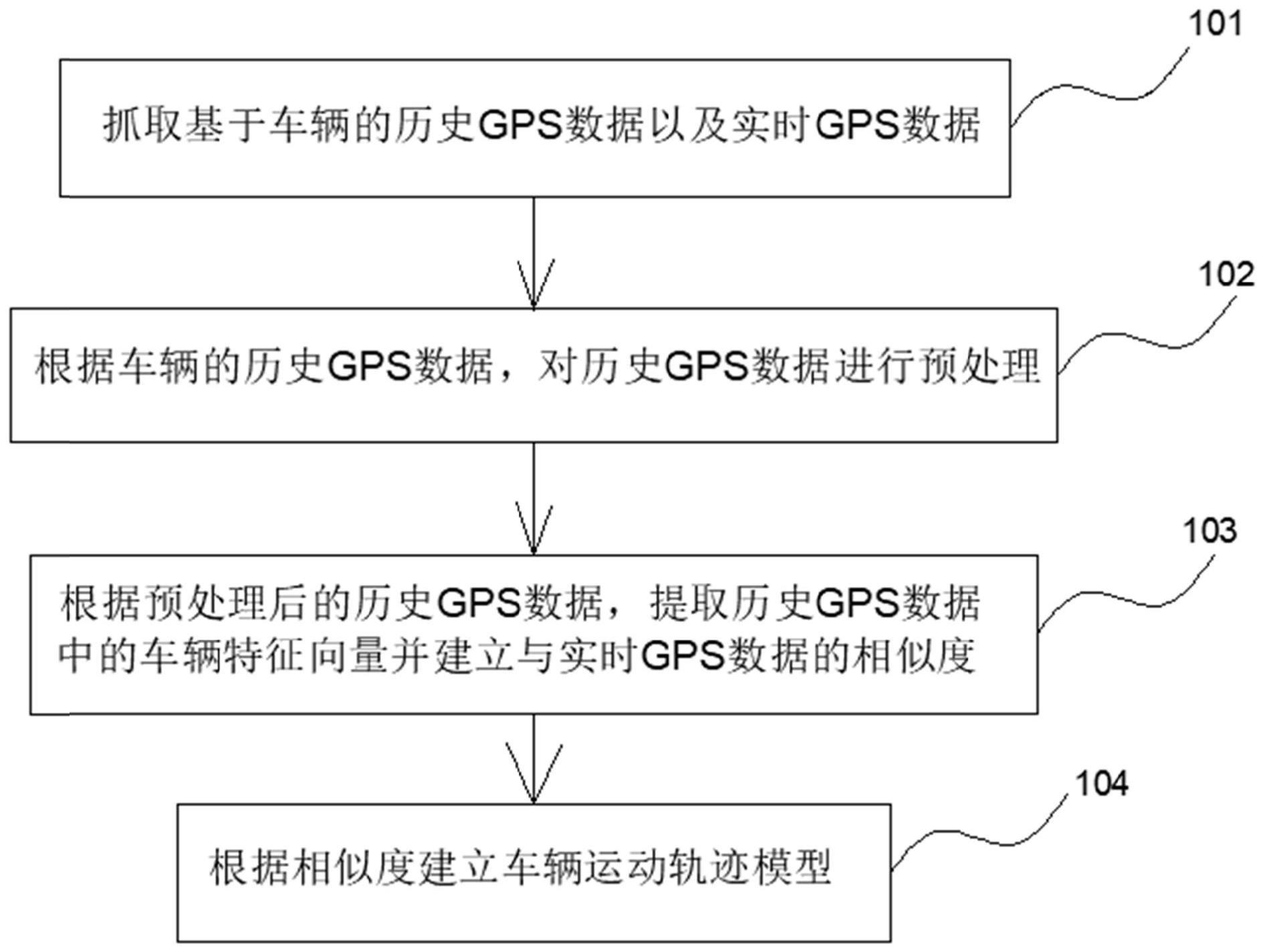
3、抓取基于车辆的历史gps数据以及实时gps数据;
4、根据车辆的历史gps数据,对历史gps数据进行预处理;
5、根据预处理后的历史gps数据,提取历史gps数据中的车辆特征向量并建立与实时gps数据的相似度;
6、根据相似度建立车辆运动轨迹模型。
7、可选的,所述抓取基于车辆的历史gps数据以及实时gps数据包括基于历史gps数据的车辆行驶轨迹以及实时gps数据的车辆行驶轨迹。
8、可选的,所述根据车辆的历史gps数据,对历史gps数据进行预处理包括:采用分段处理的方法对历史gps数据进行预处理,根据历史gps数据记录中车辆的行驶轨迹,计算出每条车辆的行驶轨迹的轨迹段内各时刻的时间间隔,在此基础上进行分段,将每条轨迹段分为长度相同、方向不同和长度不等3类,并根据其特征值对每一段进行聚类。
9、可选的,所述车辆特征向量包括时间,车辆行驶方向,车辆行驶长度。
10、可选的,所述根据预处理后的历史gps数据,提取历史gps数据中的车辆特征向量并建立相似度包括:
11、读取历史gps数据中的车辆轨迹数据,采用基于距离的相似性度量方法,对历史gps数据的车辆轨迹数据与实时gps数据的车辆轨迹进行相似性度量,计算相似度矩阵k。
12、可选的,所述根据相似度建立车辆运动轨迹模型包括:
13、对车辆轨迹数据进行聚类分析以获取车辆轨迹簇中心位置以及点位坐标;
14、根据车辆轨迹簇中心位置与点位坐标计算车辆轨迹以及检测点的各点的地理坐标;
15、将所有点对应到以车辆轨迹簇中心位置为圆心,半径为1m的圆内;
16、根据得到的车辆轨迹簇中心位置与各点间距离和位置关系,计算出各个gps监测点之间的距离和地理坐标;
17、根据计算得到的各个gps监测点之间的距离和地理坐标以及车辆轨迹簇中心位置,推测车辆的行驶轨迹。
18、可选的,所述将所有点对应到以车辆轨迹簇中心位置为圆心,半径为1m的圆内包括:在车辆轨迹簇中选取适当的特征点对各点进行描述,以特征点为圆心、半径为1m、长度为2m、点之间距离为1m的圆作为描述值,分别计算其与监测点之间距离和地理坐标。
19、可选的,所述绘制车辆行驶轨迹路线包括:
20、分别绘制车辆行驶轨迹路线于同一地图中;
21、根据时间信息,对每个车辆的行驶轨迹路线在地图中进行定位;
22、监测在同一时刻下,地图中存在行驶轨迹重合的位置的车辆行驶轨迹数量n。
23、判断车辆行驶轨迹数量n是否超过阈值m,若n超过m则说明超过交通流量上限,若为超过阈值m,则说明未超过交通流量上限。
24、本发明的有益效果:本发明提供了一种适用于gps数据不连续时的车辆轨迹推测方法,通过抓取基于车辆的历史gps数据以及实时gps数据;根据车辆的历史gps数据,对历史gps数据进行预处理;根据预处理后的历史gps数据,提取历史gps数据中的车辆特征向量并建立与实时gps数据的相似度;根据相似度建立车辆运动轨迹模型。从而能够对车辆的行驶轨迹进行推测,推测精度高,应用前景好。
技术特征:
1.一种适用于gps数据不连续时的车辆轨迹推测方法,其特征在于,包括:
2.根据权利要求1所述的一种适用于gps数据不连续时的车辆轨迹推测方法,其特征在于,所述抓取基于车辆的历史gps数据以及实时gps数据包括基于历史gps数据的车辆行驶轨迹以及实时gps数据的车辆行驶轨迹。
3.根据权利要求1所述的一种适用于gps数据不连续时的车辆轨迹推测方法,其特征在于,所述根据车辆的历史gps数据,对历史gps数据进行预处理包括:采用分段处理的方法对历史gps数据进行预处理,根据历史gps数据记录中车辆的行驶轨迹,计算出每条车辆的行驶轨迹的轨迹段内各时刻的时间间隔,在此基础上进行分段,将每条轨迹段分为长度相同、方向不同和长度不等3类,并根据其特征值对每一段进行聚类。
4.根据权利要求1所述的一种适用于gps数据不连续时的车辆轨迹推测方法,其特征在于,所述车辆特征向量包括时间,车辆行驶方向,车辆行驶长度。
5.根据权利要求1所述的一种适用于gps数据不连续时的车辆轨迹推测方法,其特征在于,所述根据预处理后的历史gps数据,提取历史gps数据中的车辆特征向量并建立相似度包括:
6.根据权利要求1所述的一种适用于gps数据不连续时的车辆轨迹推测方法,其特征在于,所述根据相似度建立车辆运动轨迹模型包括:
7.根据权利要求7所述的一种适用于gps数据不连续时的车辆轨迹推测方法,其特征在于,所述将所有点对应到以车辆轨迹簇中心位置为圆心,半径为1m的圆内包括:在车辆轨迹簇中选取适当的特征点对各点进行描述,以特征点为圆心、半径为1m、长度为2m、点之间距离为1m的圆作为描述值,分别计算其与监测点之间距离和地理坐标。
8.根据权利要求1所述的一种适用于gps数据不连续时的车辆轨迹推测方法,其特征在于,所述绘制车辆行驶轨迹路线包括:
技术总结
本发明涉及车辆轨迹预测技术领域,具体涉及一种适用于GPS数据不连续时的车辆轨迹推测方法,通过抓取基于车辆的历史GPS数据以及实时GPS数据;根据车辆的历史GPS数据,对历史GPS数据进行预处理;根据预处理后的历史GPS数据,提取历史GPS数据中的车辆特征向量并建立与实时GPS数据的相似度;根据相似度建立车辆运动轨迹模型。从而能够对车辆的行驶轨迹进行推测,推测精度高,应用前景好。
技术研发人员:郑能欢
受保护的技术使用者:深圳数研锦瀚智慧科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!