一种旋转机械轴心轨迹初相点的自适应提取方法
本发明属于机械设备故障诊断,具体涉及一种旋转机械轴心轨迹初相点提取方法。
背景技术:
1、轴心轨迹图可以描述转子中心相对于轴承座的平面运动轨迹,能直观、清晰地反映出转子的动态行为,其形状特征与机组运行状态密切相关,国内外已有很多研究人员将轴心轨迹特征应用于旋转机械运行状态检测与故障诊断,以提高设备故障诊断的准确性。根据文献(温广瑞,印建安,张西宁,等.应用全息谱初相点进行平衡前转频故障识别[j],振动与冲击,2008,27(s):180-183)提供的资料,可以得到轴心轨迹初相点的定义,它是指键相传感器对准键槽(或反光带)位置时,转子中心在轴心轨迹上的位置。初相点作为转子轴心轨迹的重要特征参数,常常用于定量分析、评价轨迹的重复性和稳定性,是准确区分设备故障的重要指标。例如,油膜振荡和动静碰磨是诱发设备发生转子次同步故障的两种常见因素,由于两者的特征频率非常接近,仅依靠频谱或时频特征信息很难对其进行准确区分,但它们的轴心轨迹重复性指标往往具有明显的差异性,因此轴心轨迹初相点特征对于准确识别这两类故障具有重要价值。
2、目前,在设备监测诊断领域中,利用数据分析软件提取轴心轨迹初相点的常规方法为:首先,同步采集转子某一测量截面上x、y方向的振动位移及同轴键相信号;其次,根据所选的键相传感器型号人工确定键相脉冲触发方向、形状,并设定固定的幅值阈值;最后,当键相信号幅值超过设定的幅值阈值时,确定该时刻为脉冲触发时刻,其对应的轴心轨迹坐标点即为初相点。由此可见,设备轴心轨迹初相点的获取明显受到键相信号的影响,这使得常规的初相点提取方法存在如下缺点:首先,不同类型的键相传感器产生的脉冲方向具有差异性,常规方法无法自动判定脉冲触发方向;其次,同一类型的键相传感器产生的脉冲幅值也各有差异,常规方法通过设定固定阈值作为检测脉冲触发位置的标准,无法自适应调整检测阈值;最后,设备转速的高低、键槽或反光带的宽度会直接影响脉冲信号宽度,键相信号脉冲形状呈现多样化,会严重影响脉冲触发位置识别的准确性。面对如此复杂、多变的现场测试条件,如何针对不同的触发方向、触发幅值及脉冲宽度的键相信号,在数据分析软件中准确实现设备轴心轨迹初相点的自适应提取,是提高旋转机械故障诊断准确性亟需解决的关键问题之一。
技术实现思路
1、为克服上述现有技术的不足,本发明目的在于提供一种旋转机械轴心轨迹初相点的自适应提取方法,以适应不同的脉冲触发方向、脉冲幅度与脉冲宽度条件下轴心轨迹初相点特征提取,从而为旋转设备故障精准诊断提供更丰富的诊断信息。
2、为达到上述目的,本发明采取的技术方案为:
3、一种旋转机械轴心轨迹初相点的自适应提取方法,包括以下步骤:
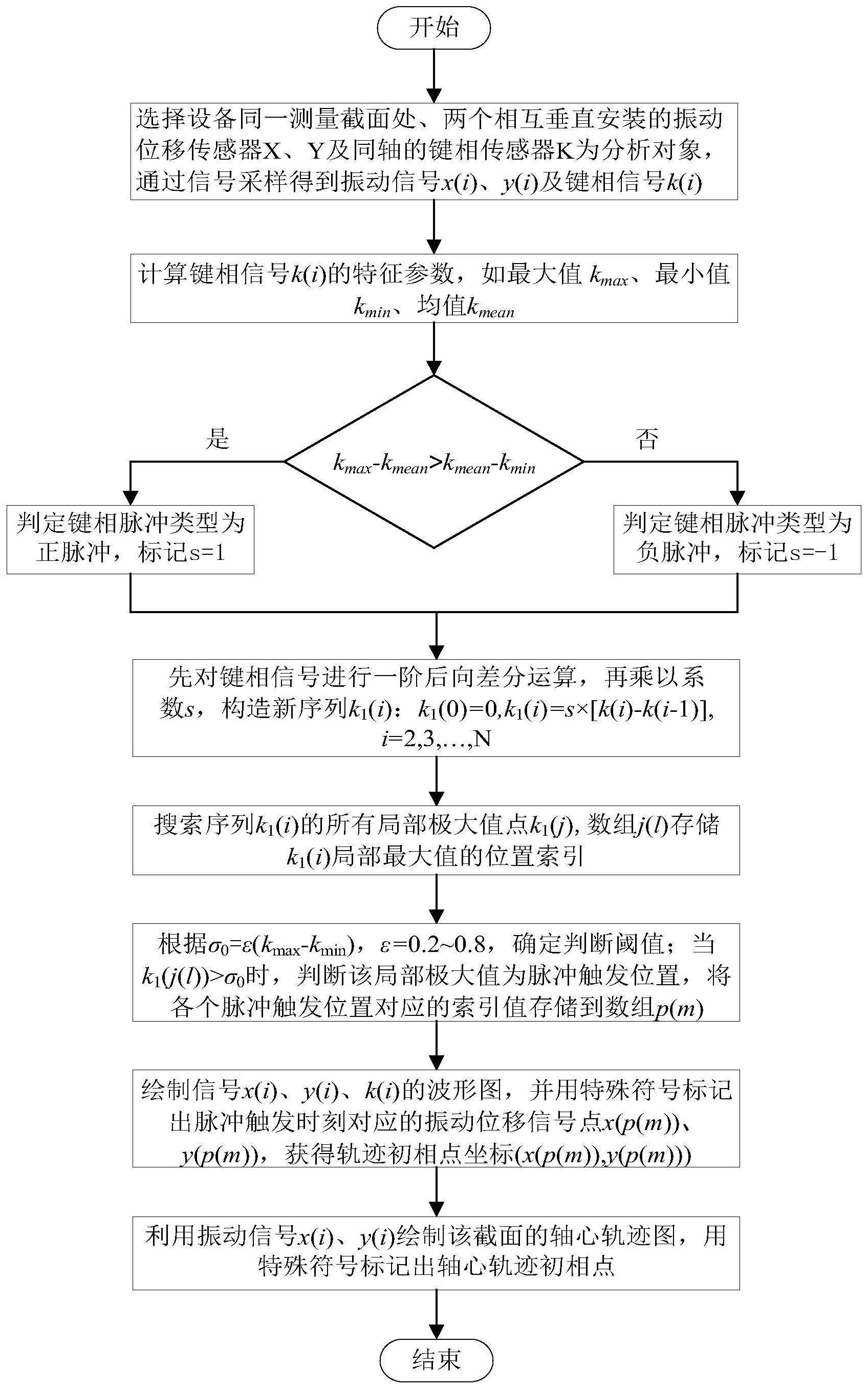
4、1)选择设备同一测量截面处、两个相互垂直安装的转轴振动位移传感器x、y及同轴的键相传感器k为分析对象,通过信号采样得到振动样本信号x(i)、y(i)及键相信号k(i),i=1,2,...,n,其中:n表示单个样本的采样长度;
5、2)计算键相信号k(i)的特征参数,包括最大值kmax、最小值kmin、均值
6、3)根据步骤2)中的最大值kmax、最小值kmin及均值kmean的相互关系,自动确定键相信号的触发方向,判断规则如下:如果kmax-kmean>kmean-kmin,则判定为正脉冲信号,标记s=1;如果kmax-kmean<kmean-kmin,则判定为负脉冲信号,标记s=-1;
7、4)先对键相信号k(i)进行一阶后向差分运算,再乘以系数s,构造新序列k1(i),操作如下:令k1(1)=0,k1(i)=s×[k(i)-k(i-1)],i=2,3,...,n;搜索序列k1(i)的所有局部极大值点k1(j),数组j(l)存储k1(i)局部极大值的位置索引;
8、5)利用键相信号k(i)的脉冲幅度大小设定判断阈值σ0,在k1(j(l))中寻找脉冲触发位置,判断方法为:若k1(j(l))>σ0时,则判断该局部极大值点为脉冲触发位置,依次将各个脉冲触发位置对应的索引值,存储到数组p(m),m=1,2,3,...,m,m表示键相信号k(i)中包含的所有脉冲个数;
9、6)分别绘制信号x(i)、y(i)、k(i)的波形图,并在振动波形图中用特殊符号标记出脉冲触发时刻对应的信号点x(p(m))、y(p(m)),获得轴心轨迹初相点的坐标(x(p(m)),y(p(m)));利用振动信号x(i)、y(i)绘制该测量截面的轴心轨迹图,最后用特殊符号标记出轴心轨迹的初相点(x(p(m)),y(p(m)))。
10、所述的步骤1)中键相传感器包括但不限于电涡流传感器、光电传感器等,键相信号的脉冲方向、脉冲宽度及幅度均无特殊要求。
11、所述的步骤2)中判断阈值σ0,由公式σ0=ε(kmax-kmin)确定,ε取值范围为0.2~0.8。
12、本发明的有益效果为:
13、本发明通过自动判断键相信号的脉冲触发方向,并依据键相信号自身特点自适应确定脉冲检测阈值及触发位置,很好地解决了传统方法无法满足不同的脉冲触发方向、脉冲幅度与脉冲宽度条件下准确提取轴心轨迹初相点的难题,实现了轴心轨迹初相点特征的自适应提取,为轴心轨迹稳定性、复杂性的定量评价提供了关键信息,有助于实现旋转设备故障的精准诊断。
技术特征:
1.一种旋转机械轴心轨迹初相点的自适应提取方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的方法,其特征在于:所述的步骤1)中键相传感器包括但不限于电涡流传感器、光电传感器,键相信号的脉冲方向、脉冲宽度及幅度均无特殊要求。
3.根据权利要求1所述的方法,其特征在于:所述的步骤2)中判断阈值σ0,由公式σ0=ε(kmax-kmin)确定,ε取值范围为0.2~0.8。
技术总结
一种旋转机械轴心轨迹初相点提取的自适应方法,首先通过离散采样得到测量截面的振动位移信号及同轴键相信号,计算键相信号的最大值、最小值和均值,利用三者之间的距离关系自动判断脉冲类型;然后,对键相信号进行一阶后向差分运算构造新序列,并搜索其所有局部最大值点,依据键相信号自身特点自适应确定脉冲检测阈值及脉冲触发位置;最后利用测量截面的振动波形与脉冲触发位置索引,获取轴心轨迹初相点的坐标,绘制相应的轴心轨迹图并标记出初相点位置;本发明实现了不同的脉冲触发方向、脉冲幅度与脉冲宽度条件下轴心轨迹初相点的自适应提取,为轴心轨迹稳定性、复杂性的定量评价提供了关键信息,有助于实现旋转设备故障的精准诊断。
技术研发人员:瞿雷,白情波,乔孔孔,王忠
受保护的技术使用者:西安建筑科技大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!