基于虚实融合的齿轮箱小样本故障诊断方法
本发明属于机械故障诊断领域,具体涉及一种基于虚实融合的齿轮箱小样本故障诊断方法。
背景技术:
1、行星齿轮箱作为旋转机械的关键部件,其因为结构紧凑、体积小且承载力高的特点,被广泛应用于风电设备、船舶、煤矿生产等行业。然而,由于行星齿轮箱工作环境复杂多变,需要承受重载、加速度极大的变载冲击力,机械部件容易发生损耗甚至失效。齿轮箱一旦发生故障,容易造成机械缺陷、经济损失甚至人员伤亡,因此需要对齿轮箱进行状态监测和故障诊断,以确保机械传动系统的可靠性。
2、现有的故障诊断方法都要求大量的历史故障数据参与训练。然而,在真实工业场景下,收集大量的目标故障的数据是比较困难的。这会导致由小样本数据建立的故障诊断模型容易出现过拟合和泛化能力差的问题。数字孪生技术通过建立与运行实体高度相似的仿真模型来对目标设备进行状态监测和故障诊断。通过构建仿真模型,生成对应工况对应故障类型的信号,以实现目标工况小样本数据增强的目的。然而,在真实场景下,收集到信号往往存在着复杂的噪声干扰,另外收集到的振动信号还包含了其他机械部件对齿轮箱的影响。这些导致了真实条件下振动信号的复杂分布。而数字孪生模型被看作一个理想模型,生成的信号往往只存在故障相关的特征,其他随机、非线性的干扰被忽视了。因此在真实信号和仿真信号之间不可避免的会存在分布差异,导致单纯的数字孪生技术构建的仿真模型不能用于真实场景下的齿轮箱故障诊断。
技术实现思路
1、本发明是为了解决上述问题而进行的,目的在于提供一种基于虚实融合的齿轮箱小样本故障诊断方法。
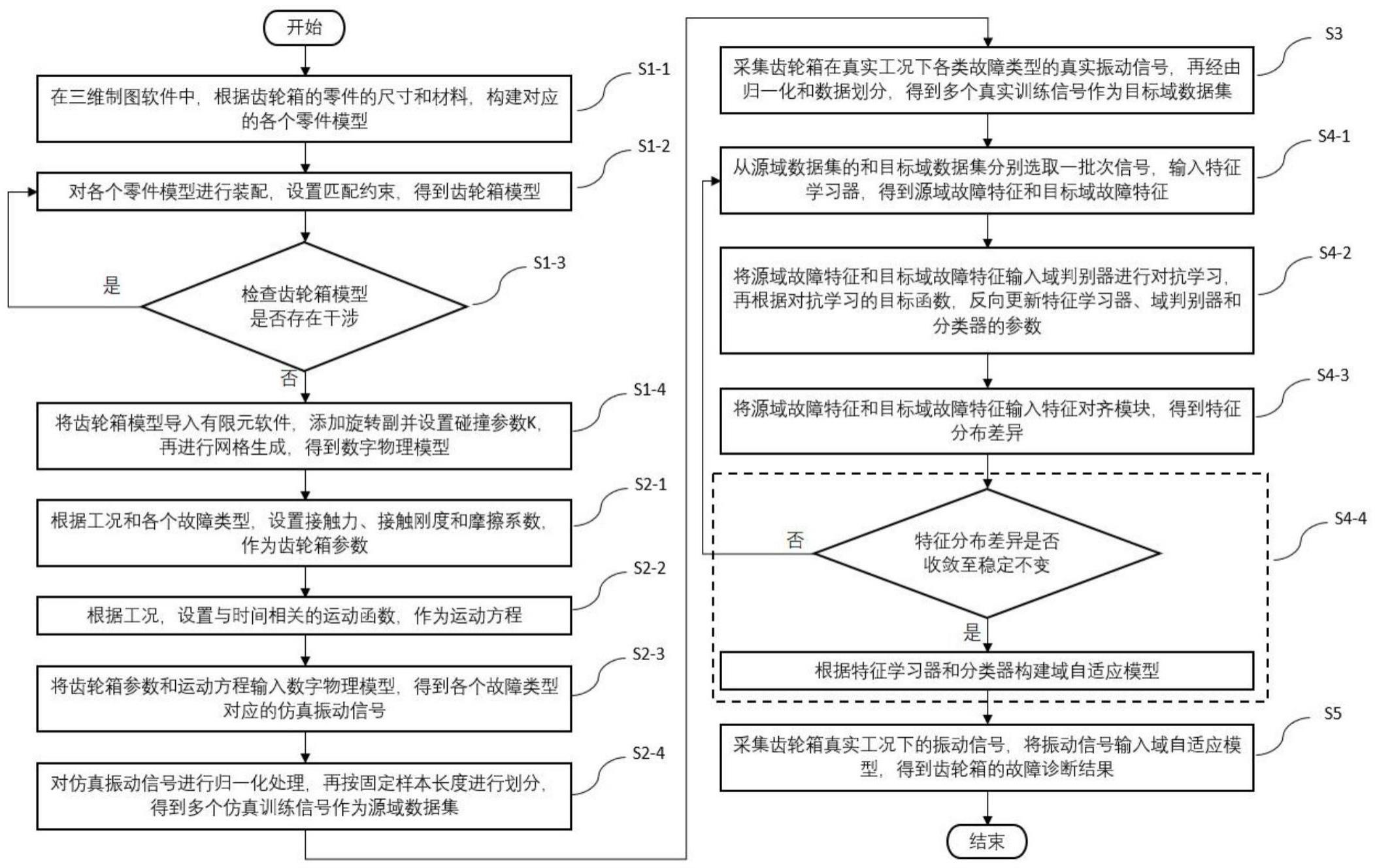
2、本发明提供了一种基于虚实融合的齿轮箱小样本故障诊断方法,用于构建域自适应模型对齿轮箱进行故障诊断,具有这样的特征,包括以下步骤:步骤s1,根据齿轮箱的技术参数,构建数字物理模型;步骤s2,根据数字物理模型,得到各类故障类型的仿真振动信号,再经由归一化和数据划分,得到多个仿真训练信号作为源域数据集;步骤s3,采集齿轮箱在真实工况下各类故障类型的真实振动信号,再经由归一化和数据划分,得到多个真实训练信号作为目标域数据集;步骤s4,将源域数据集和目标域数据集输入迁移学习网络进行迁移学习,得到域自适应模型;步骤s5,采集齿轮箱真实工况下的振动信号,将振动信号输入域自适应模型,得到齿轮箱的故障诊断结果。
3、在本发明提供的基于虚实融合的齿轮箱小样本故障诊断方法中,还可以具有这样的特征:其中,步骤s1包括以下子步骤:步骤s1-1,在三维制图软件中,根据齿轮箱的零件的尺寸和材料,构建对应的各个零件模型;步骤s1-2,对各个零件模型进行装配,设置匹配约束,得到齿轮箱模型;步骤s1-3,检查齿轮箱模型是否存在干涉,若是,则进入步骤s1-2,若否,则进入步骤s1-4;步骤s1-4,将齿轮箱模型导入有限元软件,添加旋转副并设置碰撞参数k,再进行网格生成,得到数字物理模型。
4、在本发明提供的基于虚实融合的齿轮箱小样本故障诊断方法中,还可以具有这样的特征:其中,步骤s2包括以下子步骤:步骤s2-1,根据工况和各个故障类型,设置接触力、接触刚度和摩擦系数,作为齿轮箱参数;步骤s2-2,根据工况,设置与时间相关的运动函数,作为运动方程;步骤s2-3,将齿轮箱参数和运动方程输入数字物理模型,得到各个故障类型对应的仿真振动信号;步骤s2-4,对仿真振动信号进行归一化处理,再按固定样本长度进行划分,得到多个仿真训练信号作为源域数据集。
5、在本发明提供的基于虚实融合的齿轮箱小样本故障诊断方法中,还可以具有这样的特征:其中,在步骤s4中,迁移学习网络包括特征学习器、域判别器、分类器和特征对齐模块,步骤s4包括以下子步骤:步骤s4-1,从源域数据集的和目标域数据集分别选取一批次信号,输入特征学习器,得到源域故障特征和目标域故障特征;步骤s4-2,将源域故障特征和目标域故障特征输入域判别器进行对抗学习,再根据对抗学习的目标函数,反向更新特征学习器、域判别器和分类器的参数;步骤s4-3,将源域故障特征和目标域故障特征输入特征对齐模块,得到特征分布差异;步骤s4-4,判断特征分布差异是否收敛至稳定不变,若是,则根据特征学习器和分类器构建域自适应模型,若否,则进入步骤s4-1。
6、在本发明提供的基于虚实融合的齿轮箱小样本故障诊断方法中,还可以具有这样的特征:其中,在步骤s4-2中,目标函数e(wg,wd,wy)的表达式如下:式中ns为源域数据集中的样本数量,nt为目标域数据集中的样本数量,ds为源域数据集,dt为目标域数据集,wg为特征学习器的参数,wd为域判别器的参数,wy为分类器的参数,ly为故障分类误差,ld为域分类误差,fy为分类器的特征函数映射,fd为域判别器的特征函数映射,fg为特征学习器的特征函数映射,xi为数据集中的第i个训练信号,yi为xi对应的故障类型,di为xi对应域标签即xi属于源域数据集或目标域数据集。
7、在本发明提供的基于虚实融合的齿轮箱小样本故障诊断方法中,还可以具有这样的特征:其中,在步骤s4-3中,特征分布差异dh(p,q)的计算公式如下:式中ns为源域数据集中的样本数量,nt为目标域数据集中的样本数量,为将源域数据集中的第i个训练信号映射到再生核希尔伯特空间的特征映射,为将目标域数据集中的第j个训练信号映射到再生核希尔伯特空间的特征映射,h表示具有特征核k的再生核希尔伯特空间。
8、发明的作用与效果
9、根据本发明所涉及的基于虚实融合的齿轮箱小样本故障诊断方法,因为通过对齿轮箱构建数字物理模型,能得到大量仿真训练信号,再通过迁移学习根据小样本的真实训练信号和大量仿真训练信号训练分类器和特征提取器,根据训练好的分类器和特征提取器构建域自适应模型。所以,本发明的基于虚实融合的齿轮箱小样本故障诊断方法能够提高小样本下的齿轮箱故障诊断准确率。
技术特征:
1.一种基于虚实融合的齿轮箱小样本故障诊断方法,用于构建域自适应模型对齿轮箱进行故障诊断,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于虚实融合的齿轮箱小样本故障诊断方法,其特征在于:
3.根据权利要求1所述的基于虚实融合的齿轮箱小样本故障诊断方法,其特征在于:
4.根据权利要求1所述的基于虚实融合的齿轮箱小样本故障诊断方法,其特征在于:
5.根据权利要求4所述的基于虚实融合的齿轮箱小样本故障诊断方法,其特征在于:
6.根据权利要求4所述的基于虚实融合的齿轮箱小样本故障诊断方法,其特征在于:
技术总结
本发明提供了一种基于虚实融合的齿轮箱小样本故障诊断方法,具有这样的特征,包括以下步骤:步骤S1,根据齿轮箱的技术参数,构建数字物理模型;步骤S2,根据数字物理模型得到多个仿真训练信号作为源域数据集;步骤S3,采集齿轮箱在真实工况下各类故障类型的真实振动信号,再经由归一化和数据划分,得到多个真实训练信号作为目标域数据集;步骤S4,将源域数据集和目标域数据集输入迁移学习网络进行迁移学习,得到域自适应模型;步骤S5,采集齿轮箱真实工况下的振动信号,将振动信号输入域自适应模型,得到齿轮箱的故障诊断结果。总之,本方法能够提高小样本下的齿轮箱故障诊断准确率。
技术研发人员:余建波,叶壮,王思远
受保护的技术使用者:同济大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!