一种动态物品的三维测量方法及系统
本发明涉及三维测量领域,更具体的说是涉及一种动态物品的三维测量方法及系统。
背景技术:
1、人类的生活空间本质上是三维的物质世界,所有物体都有大小、高低等轮廓属性。随着计算机运算能力的提升,物体的这些属性信息可以通过计算机进行模拟、存储和处理。高精度三维测量、数字化三维建模、3d打印等新技术在工业制造、工业检测、文化艺术、医疗卫生等领域的应用日益广泛。三维测量作为物体形貌数据获取的重要手段,也有了长足的发展。不同三维测量技术的测量原理、使用场景各不相同。
2、以传统的三坐标测量仪为例,通过与物体发生直接接触来获知物体表面不同位置的三维信息,其精度能达到微米甚至亚微米级,缺点就是仪器成本高且测量效率差,测量过程中直接接触物体,无法测量易碎、柔软的物体。基于光学技术的无接触测量方法应运而生。其中,相移轮廓术凭借其测量速度快、精度高、成本低、无需与被测物体进行接触等优点而备受瞩目。典型的相移轮廓术测量系统包含一个相机和一个投影仪。投影仪投射多幅正弦波条纹到被测物体表面,相机从另一个角度采集反射回来的条纹图,经过相位提取、相位解包裹等操作,最终利用相位信息结合系统参数对被测物体进行三维重构。由于需投射多幅条纹图,该方法要求物体在测量过程中保持静止不动,一旦物体出现运动,则导致测量失败。
3、因此,如何实现动态物品的测量是本领域技术人员亟需解决的。
技术实现思路
1、有鉴于此,本发明提供了一种动态物品的三维测量方法及系统,围绕物体运动的跟踪与数学描述、包含运动信息的三维重构模型以及基于最小二乘法的相位提取展开研究,实现运动物体的精确测量。
2、为了实现上述目的,本发明采用如下技术方案:
3、一种动态物体的三维测量方法,包括以下步骤:
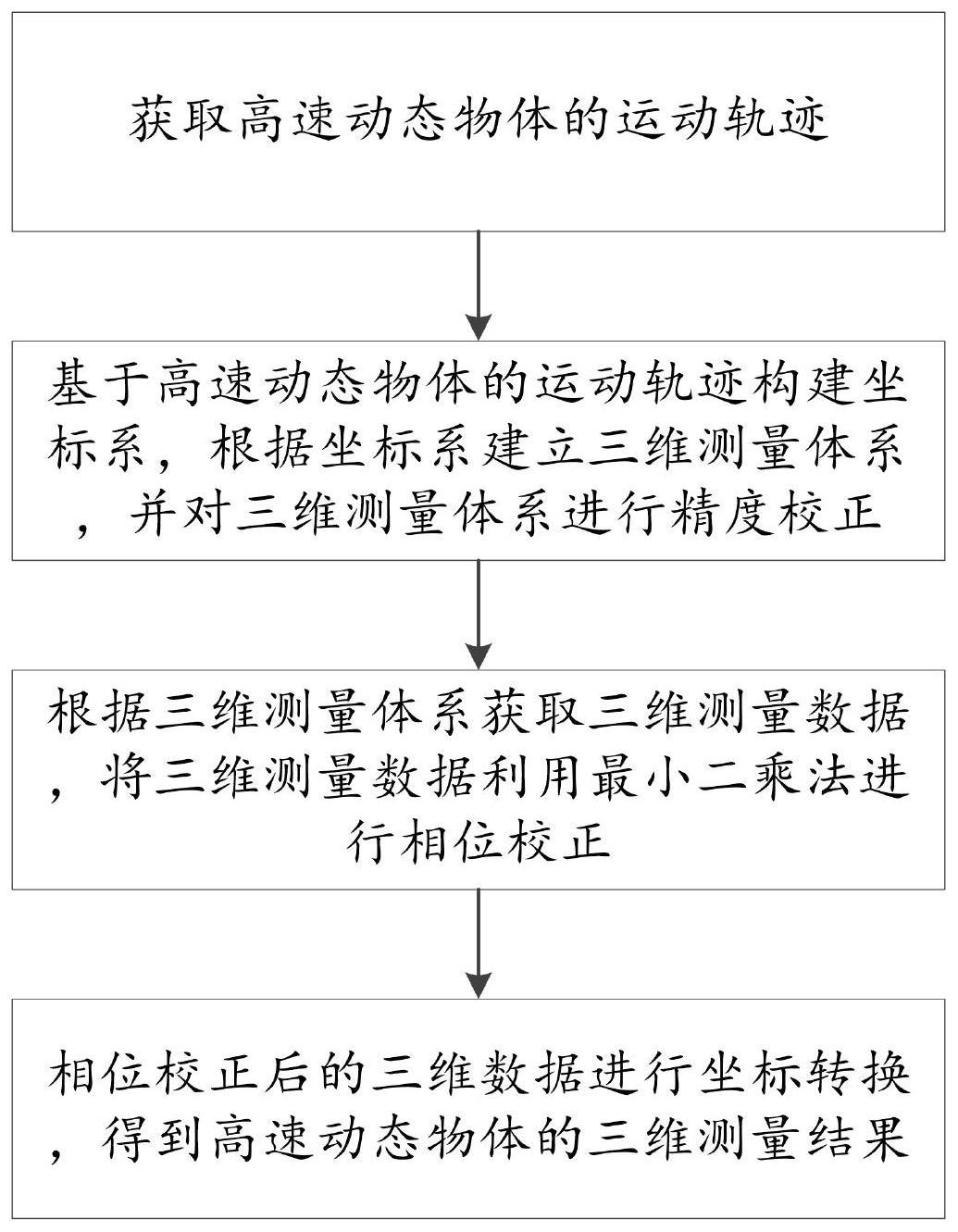
4、获取高速动态物体的运动轨迹;
5、基于高速动态物体的运动轨迹构建坐标系,根据坐标系建立三维测量体系,并对三维测量体系进行精度校正;
6、根据三维测量体系获取三维测量数据,将三维测量数据利用最小二乘法进行相位校正;
7、相位校正后的三维数据进行坐标转换,得到高速动态物体的三维测量结果。
8、可选的,获取高速动态物体的运动轨迹具体为:
9、投影仪在时间t内连续投射n幅相移光栅,同时数据记录器从m个角度捕获m×n幅相移光栅;
10、将m×n幅光栅根据时间顺序连续排列,排列结果则为运动轨迹。
11、可选的,基于高速动态物体的运动轨迹构建坐标系具体包括:将采集到的运动轨迹进行重采样,并重构运动轨迹;通过重构后的运动轨迹标注出运动轨迹的多个边缘点以及中点;连接多个边缘点和中点,记录多个边缘点和中点;将中点作为原点,结合多个边缘点构建三维空间坐标系。
12、可选的,还包括计算两个运动轨迹比较过程中全局基准坐标系之间的相对旋转矩阵,并利用单一的静态基准点获得全局基准坐标系之间的相对位移。
13、可选的,对三维测量体系进行精度校正,具体为:基于不重合角为小角度,通过空间坐标旋转,建立不重合角的校正方程;依据物理量的给定值和实际测量得到的测量值,确定不重合角计算的目标函数;应用多变量寻优的最优化技术单纯形加速法,确定不重合角;由确定的不重合角实现多组三维坐标轴系之间不重合的校正。
14、可选的,还包括对运动轨迹的边缘进行降噪处理。
15、一种动态物体的三维测量系统,包括:运动轨迹获取模块,三维测量体系构建模块,相位校正模块,测量结果获取模块;
16、其中,运动轨迹获取模块,用于获取高速动态物体的运动轨迹;
17、三维测量体系构建模块,用于基于高速动态物体的运动轨迹构建坐标系,根据坐标系建立三维测量体系,并对三维测量体系进行精度校正;
18、相位校正模块,用于根据三维测量体系获取三维测量数据,将三维测量数据利用最小二乘法进行相位校正;
19、测量结果获取模块,用于相位校正后的三维数据进行坐标转换,得到高速动态物体的三维测量结果。
20、可选的,所述运动轨迹获取模块包括投影仪和数据记录器,所述投影仪用于影仪在时间t内连续投射n幅相移光栅,所述数据记录用于从m个角度捕获m×n幅相移光栅。
21、经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种动态物品的三维测量方法及系统,具有以下有益效果:
22、1、围绕物体运动的跟踪与数学描述、包含运动信息的三维重构模型以及基于最小二乘法的相位提取展开研究,实现运动物体的精确测量;
23、2、当投影仪变焦扫描被测物体的深度信息时,将三步相移中的三帧条纹图依次连续循环投影到被测物体表面上,数据采集器同步采集对应的条纹图,能够提高轨迹获取的精度;
24、3、采用本发明的技术方案能大大减少方程组计算量,提高了运算效率。
技术特征:
1.一种动态物体的三维测量方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种动态物体的三维测量方法,其特征在于,获取高速动态物体的运动轨迹具体为:
3.根据权利要求1所述的一种动态物体的三维测量方法,其特征在于,基于高速动态物体的运动轨迹构建坐标系具体包括:将采集到的运动轨迹进行重采样,并重构运动轨迹;通过重构后的运动轨迹标注出运动轨迹的多个边缘点以及中点;连接多个边缘点和中点,记录多个边缘点和中点;将中点作为原点,结合多个边缘点构建三维空间坐标系。
4.根据权利要求1所述的一种动态物体的三维测量方法,其特征在于,还包括计算两个运动轨迹比较过程中全局基准坐标系之间的相对旋转矩阵,并利用单一的静态基准点获得全局基准坐标系之间的相对位移。
5.根据权利要求1所述的一种动态物体的三维测量方法,其特征在于,对三维测量体系进行精度校正,具体为:基于不重合角为小角度,通过空间坐标旋转,建立不重合角的校正方程;依据物理量的给定值和实际测量得到的测量值,确定不重合角计算的目标函数;应用单纯形加速法,确定不重合角;由确定的不重合角实现多组三维坐标轴系之间不重合的校正。
6.根据权利要求1所述的一种动态物体的三维测量方法,其特征在于,还包括对运动轨迹的边缘进行降噪处理。
7.一种动态物体的三维测量系统,其特征在于,包括:运动轨迹获取模块,三维测量体系构建模块,相位校正模块,测量结果获取模块;
8.根据权利要求7所述的一种动态物体的三维测量系统,其特征在于,所述运动轨迹获取模块包括投影仪和数据记录器,所述投影仪用于影仪在时间t内连续投射n幅相移光栅,所述数据记录用于从m个角度捕获m×n幅相移光栅。
技术总结
本发明公开了一种动态物体的三维测量方法及系统,涉及三维测量领域。本发明包括以下步骤:获取高速动态物体的运动轨迹;基于高速动态物体的运动轨迹构建坐标系,根据坐标系建立三维测量体系,并对三维测量体系进行精度校正;根据三维测量体系获取三维测量数据,将三维测量数据利用最小二乘法进行相位校正;相位校正后的三维数据进行坐标转换,得到高速动态物体的三维测量结果。本发明围绕物体运动的跟踪与数学描述、包含运动信息的三维重构模型以及基于最小二乘法的相位提取展开研究,实现运动物体的精确测量。
技术研发人员:魏永超,邓春艳,敖良忠,刘家伟,刘嘉欣,刘倩倩
受保护的技术使用者:中国民用航空飞行学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!